

11Расходомеры переменного перепада давления.
Используются, в основном, для контроля вспомогательных процессов энергоснабжения. Высокие рабочие давления и простота конструкции. Состав: —стандартное сужающее устройство (диафрагма, сопло, труба Вентури) дифманометр, соединительные линии. Измерительным преобразователем расхода является сужающее устройство, в котором образуется перепад давления .∆Р, зависящий от расхода. Зависимость квадратичная. Классический метод, описанный в любом учебнике.
ТАХОМЕТРИЧЕСКИЕ РАСХОДОМЕРЫ
Расходомеры этой группы широко применяются практически во всех отраслях пищевой промышленности. Принцип их действия основан на использовании зависимостей скорости движения тел — чувствительных элементов, помещаемых в поток, от расхода веществ, протекающих через эти расходомеры. Известно большое число разновидностей тахометрических расходомеров, однако в практике для измерения расхода самых разнообразных жидкостей и газов широко распространены турбинные, шариковые и камерные расходомеры.
ТУРБИННЫЕ РАСХОДОМЕРЫ В турбинных расходомерах чувствительным элементом являются вращающиеся под действием потока жидкости или газа турбины— крыльчатки, располагаемые горизонтально или вертикально. В турбинном водосчетчике вертикально расположенная вращающаяся крыльчатка 1 представляет собой многоходовой винт с большим шагом и располагается в корпусе 2. Частота вращения п Зтой крыльчатки, пропорциональная расходу вещества, протекающего через расходомер
(VIII.24)

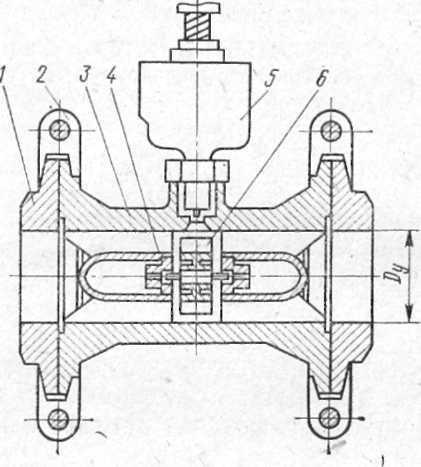
Турбинный преобразователь расхода газа (рис. VIH.8) состоит из корпуса 3, в котором расположены два обтекателя 4 и крыльчатка 6. Сверху на корпусе размещен магнитоиндукционный преобразователь 5, преобразующий частоту вращения крыльчатки в стандартизованный электрический сигнал измерительной информации.
Подобные преобразователи выпускаются в расчете на диаметры условного прохода Dy от 50 до 150 мм для измерения расхода газа от 5 до 1200 м3/ч, класс точности 1.
Шариковые расходомеры
Принцип действия тахометрических шариковых расходомеров основан на вращении закрученным потоком жидкости, протекающей через измерительный преобразователь, свободно плавающего тела —шара. Частота вращения шара f пропорциональна расходу измеряемой среды:
Различают шариковые расходомеры с осевым и тангенциальным подводом потока жидкости к измерительному преобразователю расхода.
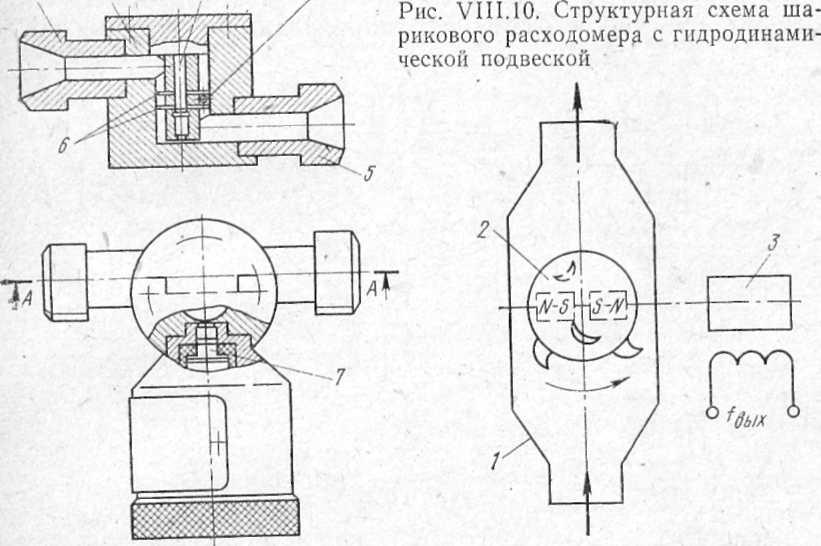
Сигнал с помощью промежуточного преобразователя приводится к нормализованному виду 0—5 мА.
Шариковые расходомеры с тангенциальным подводом жидкости предназначены для измерения малых расходов чистых жидкостей в диапазоне от 0 до 10 м3/ч, класс точности 1,5, шариковые расходомеры с осевым подводом жидкости — от 2,5 до 600 м3/ч, класс точности 1,5; 2,5.
Гидродинамическая подвеска позволяет исключить механическое трение и значительно (в 4—5 раз) повышает надежность расходомеров.
Камерные расходомеры
Камерные тахометрические расходомеры представляют собой эдин или несколько подвижных элементов, отмеривающих или отсекающих при своем движении определенные объемы жидкости
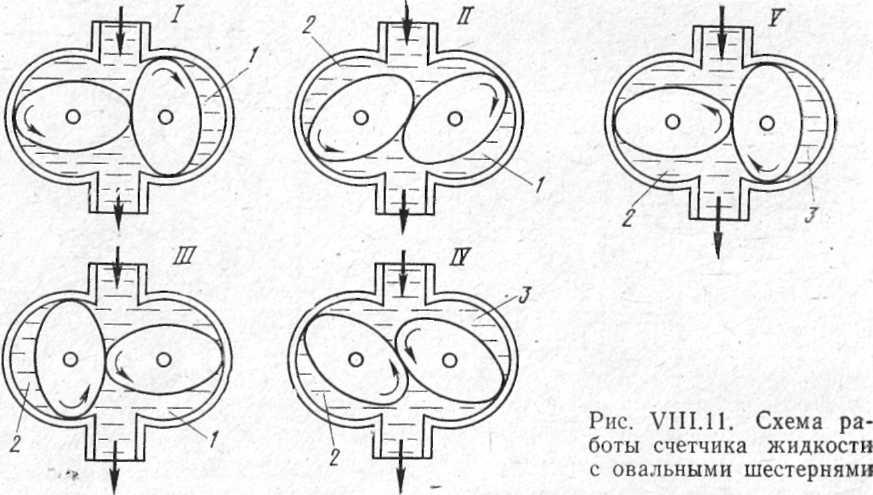
или газа. Существует большое число конструкций камерных расходомеров жидкостей и газов. Овально-шестеренчатый счетчик жидкостей состоит из двух одинаковых овальных шестерен, вращающихся под действием перепада давления жидкости, протекающей через его корпус. В положении / правая шестерня отсекает некоторый объем жидкости 1; так как на эту шестерню действует крутящий момент, она поворачивается по часовой стрелке, вращая при этом левую шестерню против часовой стрелки. В положении II левая шестерня заканчивает отсекание новой порции жидкости 2, а правая выталкивает ранее отсеченный объем / в выходной патрубок счетчика. В это время вращающий момент действует на обе шестерни.
Вопрос - 12
Влияние
различных з-нов регулирования на примере
объектов первого порядка без запаздывания

 (1)
(1)
Указывает на то что управление воздействия направлено в сторону уменьшения рассогласования , т.е. имеет место отр. обратная связь
1)Без
регулятора

Как исследовало ожидать ОР и без автомата регулятора приходит в новое установивш. со стат. ошибкой=К1

При использовании в (1+К2Кр) раз уменьшается стат. ошибка регулирования во столько раз уменьшается емкость и время регулирования.
С ПД-регулятором
 Т.о
добавление П-составл.не повлияло на
статистическую ошибку, но
увеличела емкость системы
Т.о
добавление П-составл.не повлияло на
статистическую ошибку, но
увеличела емкость системы
ПИД

 ;
;
 ;
;
По таблицам Лапласа ищем изображение единичного ступенчатого возмущения

 Умножим
на Р
Умножим
на Р


 ;
;

 ;
;
 ;
;
Корни вещественные и оба отр.
 ;
D=0;
;
D=0;
 ;
; ;
;

Корни комплексные



Т.О. при использовании регулятора с устойчивым объектам 1-го порядка зависимости от коэф.ур-я динамики и настроичного параметра Ти и возможн. как апериодич. так и колебательные затухающие переходные процессы.
Стат. ошибка регулир=0.Аналог можно просмотреть случаи с ПИ и ПИД-регуляторы. В зависимости от коэффициентов настроечных параметров возможны как апериодические так и колебательно-затухающий переходный процесс.
При этом обеспечивается отсутствие стат. ошибки регулирования, а др.составляют улучш. качественные показатели: время регулирования данной ошибки и др.
Вопрос - 13
В
дифференциально-трансформаторных
передающих преобразователях и
основанной на их использовании системе
дистанционной передачи унифицированным
сигналом измерительной информации
является значение взаимной индукции
между обмотками электрических катушек
(пределы изменения взаимной индуктивности
, 0—10 мГн).
Дифференциально-трансформаторный
преобразователь
представляет собой две катушки первичная
и вторичную,
состоящие каждая из двух секций.
Первичная катушка
состоит
из двух секций, включенных между собой
согласно, т. е. выход одной включен
на вход другой, а во вторичной катушке
выход первой секции 1подключен к выходу
второй секции 2.
Внутри
катушек под действием преобразуемой
величины перемещаетсясердечник4.
Взаимная индуктивность системы в зависимости от положения
сердечника выразится формулой
Величина и фаза выходного сигнала Е(ЭДС) зависят от положения сердечника в катушке преобразователя по отношению к нейтрале О—О.
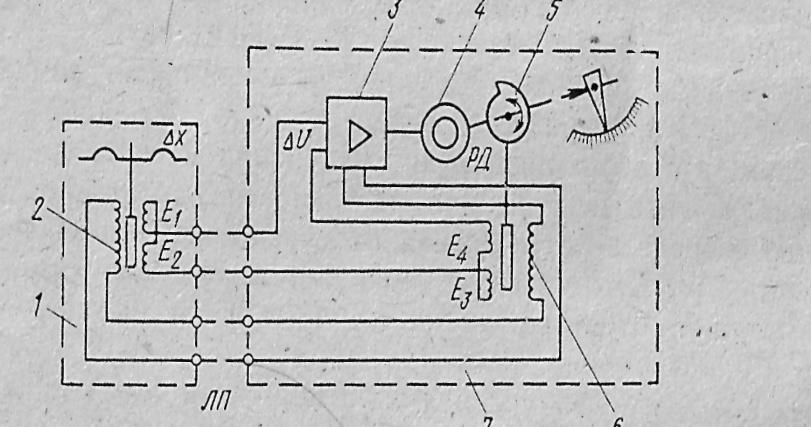
Принципиальная электрическая схема дифференциально-трансформаторной системы дистанционной передачи
Вторичные обмотки включены встречно и подключены ко входу электронного усилителя.
'Когда сердечник трансформатора 2 находится в среднем (нейтральном) положении, ЭДС, индуцируемые во вторичных обмотках E1 и Е2, равны и направлены навстречу. Это положение характеризуется равенством

Если сердечник трансформатора 6 тоже находится в среднем положении, разность ЭДС во вторичных обмотках этой катушки Е3 и Е4 также равна нулю:
U2 = Е3- Е4 = 0. •
Из равенства следует, что при одинаковых параметрах катушек напряжение на входе в усилитель равно нулю и система находится в покое. В этом случае сигнал разбаланса равен нулю и можно записать:

При
отклонении положения сердечника
трансформатора 2
от
нейтрального под действием изменения
измеряемого параметра изменяется распределение магнитных
потоков во вторичных обмотках.
Следовательно, индуцируемые в них ЭДС
не будут равны, и в цепи возникнет ток,
напряжение которого
изменяется распределение магнитных
потоков во вторичных обмотках.
Следовательно, индуцируемые в них ЭДС
не будут равны, и в цепи возникнет ток,
напряжение которого

Величина
этого напряжения является функцией
перемещения сердечника трансформатора
2,
а
фаза зависит от направления отклонения
сердечника от среднего положения. Сигнал
разбаланса
 подается
на вход электронного усилителя3
и
после усиления поступает на обмотку
управления реверсивного электродвигателя
4,
который
с помощью кулачка 5
перемещает
сердечник трансформатора 6
до
тех пор, пока разность напряжений
подается
на вход электронного усилителя3
и
после усиления поступает на обмотку
управления реверсивного электродвигателя
4,
который
с помощью кулачка 5
перемещает
сердечник трансформатора 6
до
тех пор, пока разность напряжений
 снова
не станет равна нулю. Одновременно с.
перемещением сердечника движутся
стрелка отсчетного устройства или перо
пишущего механизма, связанные с
реверсивным электродвигателем. В
результате каждому положению сердечника
трансформатора2
передающего
устройства соответствует определенное
положение сердечника катушки
воспринимающего устройства.
снова
не станет равна нулю. Одновременно с.
перемещением сердечника движутся
стрелка отсчетного устройства или перо
пишущего механизма, связанные с
реверсивным электродвигателем. В
результате каждому положению сердечника
трансформатора2
передающего
устройства соответствует определенное
положение сердечника катушки
воспринимающего устройства.
Из
изложенного следует, что
дифференциально-трансформаторный
преобразователь является устройством,
в котором перемещение сердечника
преобразуется во взаимную индуктивность
между его первичной и вторичной обмотками.
Неравенство взаимных индуктивностей
двух преобразователей в системе
дистанционной передачи, обусловливает
возникновение в ней сигнала разбаланса
в виде разности напряжения
 .
Основная погрешность
дифференциально-трансформаторной
системы при передаче на расстояние
до 250 м±0,5—1%, на расстояние до 1 км±2,5%.
.
Основная погрешность
дифференциально-трансформаторной
системы при передаче на расстояние
до 250 м±0,5—1%, на расстояние до 1 км±2,5%.