

15 Назначение и принцип действия электросилового и электропневматического преобразователей.
Электросиловой преобразователь:
 Предназначен
для преобразования первично-измерительной
информации (механич. воздейств.) в
унифицированный токовый сигнал.
Предназначен
для преобразования первично-измерительной
информации (механич. воздейств.) в
унифицированный токовый сигнал.
l – усилие
1 – Т-образный рычаг; 2 – пружина для установки устройства на ноль;
3 – Г-образный рычаг; 4 – упор для изменения пределов преобразования;
5 – дифференциально-трансформаторный преобразователь;
6 – усилитель; 7 – Электромагнит (для создания силы обратной связи – Рос во избежание опрокидывания рычажной системы); 8 – нагрузка или потребитель.
Электропневматический преобразователь
Предназначен для преобразования первично-измерительной информации в унифицированный сигнал (20-100кПа).
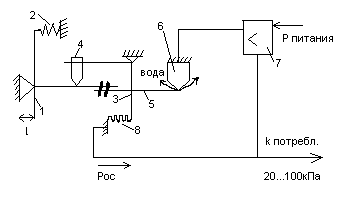
5 – тонкая металлич. стальная пластина жесткоприкрепленная; 6 – сопла;7 – пневмоусилитель ; 8 – сильфон (тонкостенная трубка с перфорированными стенками).
В качестве потребителя может быть вторичный прибор или регулятор.
16 Прядок выбора типа автоматического регулятора и определение его настроечных параметров.
При выборе типа руководствуются следующим:
1.) динамическими свойствами объекта регулирования (ОР)(самовыравнивание, емкость, время запаздывания).
2.) величиной и характером возмущающего воздействия.
3.) требованиями, предъявляемыми к качеству регулирования.
Один и тот же переходный процесс можно получить с помощью различных типов АР. Следует стремится к более простому:
И→П→ПИ→ПР→ПИР.
Т.к. качество регулирования это вполне определяемые числовые параметры, то наряду с выбором типа АР определяют его настроечные параметры.
3 способа:
1.) экспериментальный путь – надежный, но трудоемкий способ, в ряде случаев ограниченный невозможностью больших отклонений регулир. величины.
2.) аналитический путь - должно быть известно уравнение динамики и его коэффициенты. Подставляя различные законы регулирования и значения насроечных параметров, решают эти уравнения.
3.) с помощью монограмм и эмпирических формул – определяют настроечные параметры для заданного типа переходного процесса для ОР 1-го порядка. ОР более высокого порядка приблизительно равен рассмотр. как ОР 1-го порядка с временем запаздывания tз, кот. Отражается в правой части ур-ния:

17.Основные понятия и определения тар
Технологический процесс организуеться на соответствующем оборудовании, который называется ТОУ-технологический объект управления. Качество работы ТОУ оцениваеться одним или несколькими параметрами, которые называються выходными.
Параметры, оказывающие влияние на выходные называються выходными.
Параметры оказывающиеся влияние на выходные назыв. Входными. Входные параметры деляться на 2-е группы:
Управляющие
Возмущающие(внутренние, внешние)
Возмущающие – подвержены произвольным колебаниям во времени, их отклонения от заданных значений приводит к отклонению выходных параметров в связи с чем возникает необходимость управления объектов.
Внутренние – возникают внутри объекта( в результате изменения технических характеристик оборудовании яв процессе эксплуатации), очень медленно действующие возмущения. Характер (моменты) их проявления можно предположить. Например, накипь в теплообменнике, засорение форсунок, разрушение футуровки печей.
Внешние- поступают в объект из вне, например изменение давления пара, нагрузки теплообменника, - это быстродействующие возмущения. Моменты и характер проявления заранее неизвестны.
Управляющие – те, которые целенаправленно используются оператором или автоматическим устройством и служат для поддержания выходных параметров вблизи заданных значений.
В зависимости от вида обьекта управления и уровня автоматизации различают:
АСУП – автоматизированные системы управления предприятием – наряду с технологическими задачами решаються и планово экономические, т.е. решаеться вопрос эффективности работы всего предприятия в целом
АСУТП – автоматизированные системы управления технологических процессов. Задача:отыскание оптимальных условий совместной работы машин и аппаратов занятых выполнением того или иного тхнологического процесса.
Локальные системы регулирования ((АСР) – автоматические системы регулирования)) – основная задача: поддержание какого-либо технологического параметра на заданном уровне