

33. Функциональная структура и классификация измерительных устройств.
По поводу измеряемой величины :
Амперметры
Вольтметры
Термометры и др.
По виду показаний :
Показывающие
Сигнализирующие
Регистрирующие
Интегрирующие (интегратор)
По принципу действия :
Электрические
Магнитоэлектрические
Термоэлектрические
По месту нах-ия :
Местные
Дистанционные
По условию работы :
Стационарные
Переносные
По назначению :
Образцовые
Рабочие (лабораторные и технические)
1 Хар-ки влияющие на результат измерения:
F.преобразования(статическая хар-ка)
Цена деления
Чувствительность
2 Хар-ки погрешности :
Случайная
Систематическая
Основная
Аддитивная
Гистерезиса
Нелинейности
Абсолютная
Относительная
Приведенная
3 Хар-ки чувствительности
Дополнительная погрешность
f. Влияния
4 Динамич. хар-ки :
ур-ние динамики
передат. Функция
5 Хар-ки взаимодействия с подкл. устройствами :
входные
выходные
импеданция (сопротивление)
Статич. хар-ка – это зависимость выходной величины от входной величины, в равнов. сост. стараются получ. ее линейно.
Погрешность g=1/2 цены деления.
Чувствительность-
степень влияния входной величины на
выходную.
Адитивная погрешность остается постоянной, мультипликативная погрешность увеличив. с увелич. значений измеряемой величины.
Различ. реальный и номинальный f-преобразования.
Номинальные f-преобразования соответ. данному типу прибора и указаны в паспорте. Реальные f- преобразовыния имеет конкретный прибор.
Погрешность
гистерезиса обусловлена наличием в
средствах измерений элементов, обладающих
электрич. или магнитным гистерезисом.Выражается
в несовпадении прямого и обратного
ходов. Оценкой этой погрешности явл
вариация:
Погрешность нелинейности обусловлена нелинейностью статистической хар-ки. Выходная величина зависит не только от выходной, но и от скорости ее изменения. Описание инерционных свойств приборов использ. динамические хар-ки.
Динамическая
хар-ка представляет собой динамическое
звено первого порядка
Динамические
хар-ки оценивают при подаче на вход.
устройства ступенч. вход. сигнала.
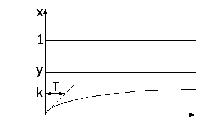
Нормирование осущ. на стадии приемочных испытаний. Далее через временной промежуток они должны подтверждаться. Отклонение хотя бы одной из хар-ик не допускается. Сущ. общий подход при нормировании метрологических хар-ик.
Для f-приборов задается виде уравнений или таблиц, все ост. метрологич. хар-ки устанавливаются в пределах нормы: класс точности, может выражаться относительной и приведенной погрешностей.
Если погрешность носит аддитивный хар-ер, то она нормир. абсолютной или приведенной погрешностью. Если носит мультипликативный хар-ер, то нормируется относительная погрешность.
34. Статистика и динамика аср. Способы получения уравнений динамики, линейные системы. Линеаризация характеристик реальных элементов.
АСР и ее элементы могут находиться как в равновесном, так и в неравновесном состоянии. Равновесное состояние характеризуется постоянством во времени вход. и выход. Величин. Однако в пр. работы равновесное состояние нарушается. Выход. и вход. величины начинают изменяться во времени. Такое состояние называется неравновесным.
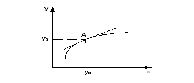
Зависимость между вход. и выход. величинами в равновесном состоянии наз. статической хар-кой и описывается уравнением 1: y=f(x)
Зависимость между вход. и выход. величинами в неравновесном состоянии наз. динамической хар-кой и описыв. уравнением 2: y=f(x,t)
В большинстве случаев статич. хар-ка носит нелинейный хар-ер. Поэтому на практике использ. обычно линейный участок осуществляющий ее линеелизацию.
Для этого непрерывную дифференц. f разлагают в ряд Тейлора.В окресности рабочей точки А т.е.
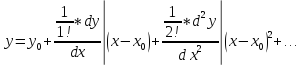
Отбрасывая бесконечно малые величины начиная со второго порядка и приводя к соотв. значению, получаем

 y=2x3
y,=6x2
k=y,/x=2=24
y=2x3
y,=6x2
k=y,/x=2=24
Линейное ур-ние статики АСР в общ. виде у=кх где к- коэффициент усиления или передачи.
Ур-ние динамики линейной АСР представляет собой неоднор. диффер. ур-ние с постоян. коэф.В общем виде записыв. след. образом:
 (t)=
(t)=
y(t)- изменение во времени выходной величины
х(t)- изменение во времени входной величины
Решить последнее ур-ние , значит найти изменения во времени у(t) при известном вход. воздействии.
Следует
отметить что в автоматике не польз.
абсолютными знач. величин , а их
отклонениями относительно базисных.
При этом под базисным понимают знач.
вход. и выход. величин на момент выхождения
системы в равновесное состояние:


Вопрос №35 - Классификация АСР
Автоматические системы регулирования классифицируются:
1. по принципу регулирования:
- системы, работающие по отклонению (y от yз)
- системы, работающие по возмущению
- комбинированные системы
2. по числу регулируемых параметров:
- многомерные
- одномерные
3. по числу контуров:
- одноконтурные
- многоконтурные
4. по назначению или характеру задающего воздействия:
- система автоматической стабилизации
yз=const
- программные системы
yз=f (t)
Такие системы оснащены уст-вами, формирующими yз во времени
- следящие системы
yз=f (y1)
Здесь yз заранее неизвестна., но известна функциональная зависимость, связывающая его с некоторым технологическим параметром.
5. по характеру регулирующего воздействия:
- непрерывные
- позиционные
В непрерывных АСР непрерывному выходному сигналу соот. непрерывный входной сигнал на выходе из любого элемента АСР.
Позиционные АСР содержат звенья, в которых преобр. непрерывную входную и выходную величины.
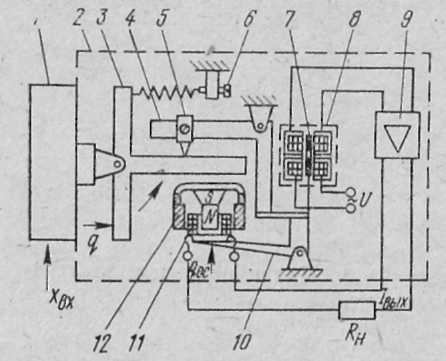
Вопрос №36 – Назначение и принцип действия электросилового преобразователя
Преобразователи предназначены для приведения сигнала измерительной информации к виду, удобному для его передачи по соответствующим каналам связи.
Принцип действия электросилового преобразователя – измеряемая физическая величина xвх воспринимается чувствительным элементом измерительного устройства 1 и преобразуется в пропорциональное ей усилие q. Это усилие через рычажную систему 3 и 4 передаточного механизма электросилового преобразователя 2 уравновешивается усилием обратной связи qос, развиваемым механизмом обратной связи, который состоит из постоянного магнита N-S с полюсными накладками 12 и круглой рамки 11, закрепленной на рычаге 10. При протекании выходного постоянного тока Iвых через обмотку рамки 11 возникает усилие обратной связи qос.
При изменении изменяемой величины, а ,следовательно, усилия q, при помощи трансформаторного (или другого) преобразователя происходит преобразование в сигнал напряжения переменного тока. Этот сигнал поступает на усилитель, служащий для усиления и преобразования ЭДС в унифицированный выходной сигнал постоянного тока Iвых, который и преобразуется в усилие qос.
Вопрос №37 – Милливольтметры, потенциометры – назначение, принцип действия.
Для
измерения термоЭДС в термоэлектрических
термометрах используются различные
приборы, например милливольтметры и
потенциометры. Принцип действия
милливольтметров основан на взаимодействии
проводника (рамки), по которому протекает
электрический ток, и магнитного поля
постоянного магнита. Рамка 1 помещается
в магнитное поле постоянного магнита
3, при этом рамка имеет возможность
поворачиваться на некоторый угол, для
чего она крепится с помощью специальных
подпятников. Для формирования равномерного
магнитного потока служит сердечник 4.
При прохождении тока в рамке возникают
2 силы, направленные в разные стороны
и стремящиеся повернуть рамку вокруг
оси. Противодействующий момент создается
спиральными пружинами 2 (нижняя не
показана), которые также служат для
подвода термоЭДС к рамке.
В основе работы потенциометров лежит нулевой метод измерения ЭДС. При этом измеряемая ЭДС уравновешивается( компенсируется ) с помощью известного падения напряжения, а результирующий эффект измеряемой и известной ЭДС, подаваемый на измерительный прибор, доводится до нуля.