

Data-Structures-And-Algorithms-Alfred-V-Aho
.pdfhttp://www.ourstillwaters.org/stillwaters/csteaching/DataStructuresAndAlgorithms/images/fig4_20.gif
http://www.ourstillwaters.org/stillwaters/csteaching/DataStructuresAndAlgorithms/images/fig4_20.gif [1.7.2001 19:10:48]
http://www.ourstillwaters.org/stillwaters/csteaching/DataStructuresAndAlgorithms/images/fig4_21.gif
http://www.ourstillwaters.org/stillwaters/csteaching/DataStructuresAndAlgorithms/images/fig4_21.gif [1.7.2001 19:10:53]
http://www.ourstillwaters.org/stillwaters/csteaching/DataStructuresAndAlgorithms/images/fig4_22.gif
http://www.ourstillwaters.org/stillwaters/csteaching/DataStructuresAndAlgorithms/images/fig4_22.gif [1.7.2001 19:10:59]
http://www.ourstillwaters.org/stillwaters/csteaching/DataStructuresAndAlgorithms/images/fig4_24.gif
http://www.ourstillwaters.org/stillwaters/csteaching/DataStructuresAndAlgorithms/images/fig4_24.gif [1.7.2001 19:11:14]
http://www.ourstillwaters.org/stillwaters/csteaching/DataStructuresAndAlgorithms/images/fig4_25.gif
http://www.ourstillwaters.org/stillwaters/csteaching/DataStructuresAndAlgorithms/images/fig4_25.gif [1.7.2001 19:11:36]
http://www.ourstillwaters.org/stillwaters/csteaching/DataStructuresAndAlgorithms/images/fig4_27.gif
http://www.ourstillwaters.org/stillwaters/csteaching/DataStructuresAndAlgorithms/images/fig4_27.gif [1.7.2001 19:11:53]
Data Structures and Algorithms: CHAPTER 6: Directed Graphs
Directed Graphs
In problems arising in computer science, mathematics, engineering, and many other disciplines we often need to represent arbitrary relationships among data objects. Directed and undirected graphs are natural models of such relationships. This chapter presents the basic data structures that can be used to represent directed graphs. Some basic algorithms for determining the connectivity of directed graphs and for finding shortest paths are also presented.
6.1 Basic Definitions
A directed graph (digraph for short) G consists of a set of vertices V and a set of arcs E. The vertices are also called nodes or points; the arcs could be called directed edges or directed lines. An arc is an ordered pair of vertices (v, w); v is called the tail and w the head of the arc. The arc (v, w) is often expressed by v → w and drawn as
Notice that the "arrowhead" is at the vertex called the "head" and the tail of the arrow is at the vertex called the "tail." We say that arc v → w is from v to w, and that w is adjacent to v.
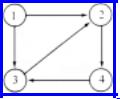
Example 6.1. Figure 6.1 shows a digraph with four vertices and five arcs.
The vertices of a digraph can be used to represent objects, and the arcs relationships between the objects. For example, the vertices might represent cities and the arcs airplane flights from one city to another. As another example, which we introduced in Section 4.2, a digraph can be used to represent the flow of control in a computer program. The vertices represent basic blocks and the arcs possible transfers of flow of control.
A path in a digraph is a sequence of vertices v1, v2, . . . , vn, such that v1 → v2, v2
→ v3, . . . , vn-1 → vn are arcs. This path is from vertex v1 to vertex vn, and passes through vertices v2, v3, . . . , vn-1, and ends at vertex vn. The length of a path is the number of arcs on the path, in this case, n-1. As a
http://www.ourstillwaters.org/stillwaters/csteaching/DataStructuresAndAlgorithms/mf1206.htm (1 of 31) [1.7.2001 19:12:41]
Data Structures and Algorithms: CHAPTER 6: Directed Graphs
Fig. 6.1. Directed graph.
special case, a single vertex v by itself denotes a path of length zero from v to v. In Fig. 6.1, the sequence 1, 2, 4 is a path of length 2 from vertex 1 to vertex 4.
A path is simple if all vertices on the path, except possibly the first and last, are distinct. A simple cycle is a simple path of length at least one that begins and ends at the same vertex. In Fig. 6.1, the path 3, 2, 4, 3 is a cycle of length three.
In many applications it is useful to attach information to the vertices and arcs of a digraph. For this purpose we can use a labeled digraph, a digraph in which each arc and/or each vertex can have an associated label. A label can be a name, a cost, or a value of any given data type.
Example 6.2. Figure 6.2 shows a labeled digraph in which each arc is labeled by a letter that causes a transition from one vertex to another. This labeled digraph has the interesting property that the arc labels on every cycle from vertex 1 back to vertex 1 spell out a string of a's and b's in which both the number of a's and b's is even.
In a labeled digraph a vertex can have both a name and a label. Quite frequently, we shall use the vertex label as the name of the vertex. Thus, the numbers in Fig. 6.2 could be interpreted as vertex names or vertex labels.
6.2 Representations for Directed Graphs
Several data structures can be used to represent a directed graph. The appropriate choice of data structure depends on the operations that will be applied to the vertices and arcs of the digraph. One common representation for a digraph G = (V,E) is the adjacency matrix. Suppose V = {1, 2 , . . . , n}. The adjacency matrix for G is an n x n matrix A of booleans, where A[i, j] is true if and only if there is an arc from vertex i to j. Often, we shall exhibit adjacency matrices with 1 for true and 0 for false; adjacency matrices may even be implemented that way. In the adjacency matrix representation the time required to access an element of an adjacency matrix is independent of the size of V and E. Thus the adjacency matrix
http://www.ourstillwaters.org/stillwaters/csteaching/DataStructuresAndAlgorithms/mf1206.htm (2 of 31) [1.7.2001 19:12:41]

Data Structures and Algorithms: CHAPTER 6: Directed Graphs
Fig. 6.2. Transition digraph.
representation is useful in those graph algorithms in which we frequently need to know whether a given arc is present.
Closely related is the labeled adjacency matrix representation of a digraph, where A[i, j] is the label on the arc going from vertex i to vertex j. If there is no arc from i to j, then a value that cannot be a legitimate label must be used as the entry for A[i, j].
Example 6.3. Figure 6.3 shows the labeled adjacency matrix for the digraph of Fig. 6.2. Here, the label type is char, and a blank represents the absence of an arc.
Fig. 6.3. Labeled adjacency matrix for digraph of Fig. 6.2.
The main disadvantage of using an adjacency matrix to represent a digraph is that the matrix requires Ω(n2) storage even if the digraph has many fewer than n2 arcs. Simply to read in or examine the matrix would require O(n2) time, which would preclude O(n) algorithms for manipulating digraphs with O(n) arcs.
To avoid this disadvantage we can use another common representation for a digraph G = (V,E) called the adjacency list representation. The adjacency list for a vertex i is a list, in some order, of all vertices adjacent to i. We can represent G by an array HEAD, where HEAD[i] is a pointer to the adjacency list for vertex i. The adjacency list representation of a digraph requires storage proportional to sum of the number of vertices plus the number of arcs; it is often used when the number of arcs is much less than n2. However, a potential disadvantage of the adjacency list representation is that it may take O(n) time to determine whether there is an arc from vertex i to vertex j, since there can be O(n) vertices on the adjacency list for vertex i.
Example 6.4. Figure 6.4 shows an adjacency list representation for the digraph of
http://www.ourstillwaters.org/stillwaters/csteaching/DataStructuresAndAlgorithms/mf1206.htm (3 of 31) [1.7.2001 19:12:41]

Data Structures and Algorithms: CHAPTER 6: Directed Graphs
Fig. 6.1, where singly linked lists are used. If arcs had labels, these could be included in the cells of the linked list.
Fig. 6.4. Adjacency list representation for digraph of Fig. 6.1.
If we did insertions and deletions from the adjacency lists, we might prefer to have the HEAD array point to header cells that did not contain adjacent vertices.† Alternatively, if the graph were expected to remain fixed, with no (or very few) changes to be made to the adjacency lists, we might prefer HEAD[i] to be a cursor to an array ADJ, where ADJ[HEAD[i]], ADJ[HEAD[i]+ 1] , . . . , and so on, contained the vertices adjacent to vertex i, up to that point in ADJ where we first encounter a 0, which marks the end of the list of adjacent vertices for i. For example, Fig. 6.1 could be represented as in Fig. 6.5.
Directed Graph ADT's
We could define an ADT corresponding to the directed graph formally and study implementations of its operations. We shall not pursue this direction extensively, because there is little of a surprising nature, and the principal data structures for graphs have already been covered. The most common operations on directed graphs include operations to read the label of a vertex or arc, to insert or delete vertices and arcs, and to navigate by following arcs
Fig. 6.5. Another adjacency list representation of Fig. 6.1.
from tail to head.
The latter operations require a little thought. Most frequently, we shall encounter in informal programs statements like
for each vertex w adjacent to vertex v do |
(6.1) |
http://www.ourstillwaters.org/stillwaters/csteaching/DataStructuresAndAlgorithms/mf1206.htm (4 of 31) [1.7.2001 19:12:41]