

4.5. Гравитационное поле.
Гравитационное взаимодействие осуществляется посредством центрального гравитационного поля (поля тяготения).
Для количественной характеристики гравитационного поля вводят две физические величины - напряженность и потенциал поля тяготения.
Напряженность
гравитационного поля
Н - векторная физическая величина, равная
по величине и направлению силе, действующей
на единичную массу, помещенную в данную
точку поля. Но из второго закона Ньютона
следует, что если силу разделить на
массу тела, на которое она действует,
то получим ускорение. Таким образом,
напряженность гравитационного поля -
не что иное, как ускорение силы тяжести.
![]() .
(4.12)
.
(4.12)
Направлена напряженность Н (как и ускорение) к телу, создающему гравитационное поле. Материальная точка массой m создает гравитационное поле напряженностью
![]() ,
(4.13)
,
(4.13)
или в скалярной
форме
![]() .
(4.13')
.
(4.13')
Модуль напряженности
поля Земли в точке, удаленной на расстояние
![]() от ее центра,
от ее центра,
![]() ,
(4.14)
,
(4.14)
где
![]() и
и![]() – масса и радиус Земли,
– масса и радиус Земли,![]() – расстояние от поверхности Земли до
точки.
– расстояние от поверхности Земли до
точки.
На поверхности
Земли
![]() или при
или при![]() имеем
имеем
 .
(4.15)
.
(4.15)
Уравнение (4.14) позволяет определять напряженность поля и ускорение свободного падения вне Земли. Прежде чем искать зависимость изменения напряженности Н внутри Земли (или любого другого однородного шара), учтем, что гравитационное поле внутри
29
При неизменной
массе тела (m
= const):
![]() (3.3)
(3.3)
где
![]() – ускорение тела.
– ускорение тела.
Если на тело действует несколько сил , то в (3.2) и (3.3) подразумевается равнодействующая этих сил:
 .
(3.4)
.
(3.4)
Разделив в уравнении
(3.2) переменные и проинтегрировав его,
получим
![]() ,
(3.5)
,
(3.5)
где
![]() – носит название импульса силы, а
– носит название импульса силы, а![]()
![]() – изменение импульса тела(
– изменение импульса тела(![]() ).
).
Используя (3.3), можно получить единицу измерения силы:
![]()
Третий закон Ньютона: силы, с которыми два тела действуют друг на друга, равны по модулю и противоположны по направлению:
![]() .
(3.6)
.
(3.6)
Но следует иметь ввиду, что эти силы приложены к разным телам.
Использовав (3.5) и
(3.6), получим
![]() или
или
![]() ,
то есть ускорения двух взаимодействующих
тел обратно пропорциональны их массам
и направлены в противоположные стороны.
,
то есть ускорения двух взаимодействующих
тел обратно пропорциональны их массам
и направлены в противоположные стороны.
Все законы Ньютона справедливы только в инерциальных системах отсчета.
3.3. Закон сохранения импульса
Совокупность взаимодействующих тел называют механической системой. Силы, действующие между телами системы, называют внутренними, а со стороны тел, не принадлежащих этой системе – внешними. Если действием внешних сил можно пренебречь, то систему называют замкнутой, или изолированной.
Рассмотрим взаимодействие двух тел массами m1 и m2, составляющих замкнутую систему. Движение каждого из тел описывается 2-ым законом Ньютона.
30
![]() .
(3.8)
.
(3.8)
Поскольку по 3-ему
закону Ньютона
![]() ,
то из (3.8) имеем
,
то из (3.8) имеем
![]() ,
,
откуда
![]() =
=![]() или
или![]() .
(3.9)
.
(3.9)
Обобщая (3.9) для
![]() тел, получаем
тел, получаем
![]() .
(3.10)
.
(3.10)
Этот результат и представляет собой закон сохранения импульса: полный импульс всех тел замкнутой системы не изменяется со временем. (При этом импульсы отдельных тел системы могут меняться произвольно).
Иногда возможны
случаи, когда вектор полного импульса
не сохраняется (![]() )
, но остается постоянным его проекция
на какую-то ось, например, стрельба из
пушки под углом к горизонту
)
, но остается постоянным его проекция
на какую-то ось, например, стрельба из
пушки под углом к горизонту![]() ,
(но
,
(но![]() ).
).
В основе закона сохранения импульса лежит одно из свойств симметрии пространства, а именно: однородность пространства - инвариантность физических законов относительно параллельных пространственных сдвигов замкнутых систем, т.е. одинаковость свойств пространства во всех точках.
3.4. Виды сил
3.4.1. Силы упругости
Под действием
внешних сил возникают деформации тел.
Если после прекращения действия внешних
сил восстанавливается прежние форма и
размеры тела, деформация называется
упругой. В процессе деформации возникают
упругие силы
![]() ,
которые уравновешивают внешние силы,
вызвавшие деформацию. Гуком экспериментально
был установлен закон, который утверждает,
что удлинение пружины пропорционально
внешней силе:
,
которые уравновешивают внешние силы,
вызвавшие деформацию. Гуком экспериментально
был установлен закон, который утверждает,
что удлинение пружины пропорционально
внешней силе:
![]() ,
,
где k – коэффициент упругости или жесткость пружины.
43
Например, чтобы
удалить тело массой
![]() из «потенциальной ямы» Земли, ему
необходимо сообщить кинетическую
энергию
из «потенциальной ямы» Земли, ему
необходимо сообщить кинетическую
энергию![]() ,
равную потенциальной энергии
,
равную потенциальной энергии![]() .
.
Рассмотрим различия между весом и силой тяжести:
1) вес – это сила,
приложенная не к телу (как сила тяжести),
а к опоре или подвесу. Вес
![]() и сила
и сила![]() равны по модулю, но противоположны по
направлению (см. рис. 4.1.);
равны по модулю, но противоположны по
направлению (см. рис. 4.1.);
2 )
по модулю сила тяжести и вес тела равны
тогда, когда тело вместе с опорой или
подвесом покоятся, либо движутся
равномерно и
)
по модулю сила тяжести и вес тела равны
тогда, когда тело вместе с опорой или
подвесом покоятся, либо движутся
равномерно и
п
![]()

![]()
![]()
![]()
![]()
![]()



![]()




![]()
![]()
![]()
![]()
![]()
![]()






![]()


![]()







![]()


![]()




![]()






![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
а) б) в) Рис. 4.1. г) д)
3) как видно на рис.
4.1., вес тела
![]() может быть не колениарен с силой тяжести
может быть не колениарен с силой тяжести![]() ,
которая всегда направлена по линии
отвеса в данной точке Земли;
,
которая всегда направлена по линии
отвеса в данной точке Земли;
4) сила тяжести
постоянна для данного места расположения
тела на Земле (![]() ),
а вес зависит от ускорения
),
а вес зависит от ускорения![]() ,
с которым тело движется в этом месте.
,
с которым тело движется в этом месте.
Например, если
лифт движется вверх с ускорением
![]() ,
то вес тела, расположенного на полу
лифта (см. рис. 4.1., в),
,
то вес тела, расположенного на полу
лифта (см. рис. 4.1., в),![]() ,
при движении лифта вниз с тем же
ускорением:
,
при движении лифта вниз с тем же
ускорением:![]() .
Аналогичный результат получится, если
рассмотрим движение машины по выпуклому
или вогнутому мостам (см. рис. 4.1., г, д).
Возникающее при этом нормальное ускорение
.
Аналогичный результат получится, если
рассмотрим движение машины по выпуклому
или вогнутому мостам (см. рис. 4.1., г, д).
Возникающее при этом нормальное ускорение![]() будет влиять на величину
будет влиять на величину![]() .
Кстати, этим же объясняется и широтное
уменьшение веса за счет суточного
вращения Земли (на экваторе вес тела на
0,3% меньше, чем на полюсе) – на полюсе
.
Кстати, этим же объясняется и широтное
уменьшение веса за счет суточного
вращения Земли (на экваторе вес тела на
0,3% меньше, чем на полюсе) – на полюсе
![]() и
и
![]() ,
а на экваторе (или на любой другой широте)
,
а на экваторе (или на любой другой широте)![]() и
и![]() ;
;
42
Еще раз обратим внимание на то, что закон всемирного тяготения справедлив для материальных точек или тел, которые можно принять за таковые. Например, любые шары или сферы считают материальными точками независимо от расстояния между ними (при этом расстояние отсчитывается от центров шаров или сфер). В векторной форме этот закон имеет вид:
![]()
![]() ,
(4.8)
,
(4.8)
где
![]() – единичный вектор, направленный от
второй материальной точки к первой. По
третьему закону Ньютона
– единичный вектор, направленный от
второй материальной точки к первой. По
третьему закону Ньютона![]() .
.
4.4 Сила тяжести и вес тела
В соответствии с
(4.7) на любое тело массой
![]() ,
расположенное вблизи Земли (
,
расположенное вблизи Земли (![]() ),
действует сила тяготения:
),
действует сила тяготения:
![]() .
(4.9)
.
(4.9)
В то же время к
взаимодействующим телам применим 2-ой
закон Ньютона:
![]() ,
поэтому
,
поэтому
![]() и
и
![]() ,
(4.10)
,
(4.10)
где![]() - сила тяжести (частный случай силы
тяготения),
- сила тяжести (частный случай силы
тяготения),![]() – ускорение силы тяжести (ускорение
свободного падения тел).
– ускорение силы тяжести (ускорение
свободного падения тел).
Поскольку
![]() зависит от радиуса Земли
зависит от радиуса Земли![]() (на экваторе
(на экваторе![]() ,
на полюсах
,
на полюсах![]() ),
следовательно, и сила тяжести в разных
точках Земли также различна. С удалением
от Земли, (например, на какое-то расстояние
),
следовательно, и сила тяжести в разных
точках Земли также различна. С удалением
от Земли, (например, на какое-то расстояние![]() от ее поверхности
от ее поверхности![]() )
сила тяжести еще больше изменяется:
)
сила тяжести еще больше изменяется:
![]() .
(4.11)
.
(4.11)
Не следует путать
силу тяжести с весом тела. Если сила
тяжести
![]() - это сила притяжения данного тела
- это сила притяжения данного тела![]() к Земле, товес
к Земле, товес
![]() тела есть
сила, с которой тело
тела есть
сила, с которой тело
![]() (вследствие его притяжения к Земле)
действует
на опору или подвес.
(вследствие его притяжения к Земле)
действует
на опору или подвес.
31
Сила упругости
противоположна по направлению внешней
силе, но равна по величине
![]()
![]() или
или
![]() .
(3.12)
.
(3.12)
Жесткость k зависит от физических свойств и геометрических параметров пружины. Закон Гука справедлив и для любого упругодеформированного тела. Но здесь следует различать два вида деформации: растяжение (или сжатие) и сдвиг. Для деформации растяжения закон Гука имеет вид
![]() ,
,![]() =
=![]() E,
(3.13)
E,
(3.13)
где
![]() – относительное удлинение,
– относительное удлинение,![]() – напряжение,
– напряжение,![]() абсолютное удлинение,
абсолютное удлинение,![]() – площадь поперечного сечения тела
(для пружны
– площадь поперечного сечения тела
(для пружны![]() ).
).
3.4.2. Силы трения
Если два соприкасающихся тела привести в движение одно по поверхности другого, то на каждую из соприкасающихся поверхностей будет действовать сила, противоположная относительной скорости движения данной поверхности. Эта сила носит название силы трения.
Сила трения - тангенциальная сила; она направлена по касательной к поверхности. Важно понять, что трение взаимно, то есть что сила трения действует на каждую из поверхностей, а также что сила трения (как правило) противоположна скорости данной поверхности относительно другой. Кроме того, утверждение, что сила трения всегда препятствует движению, не точно. Например, если положить на стол один на другой два бруска и верхний привести в движение, то по отношению к поверхности нижнего бруска сила трения будет выступать как "движущая" сила, стремясь увлечь нижний брусок в движение.
В зависимости от характера трущихся поверхностей различают сухое и вязкое трение. В свою очередь, сухое трение разделяется на трение скольжения и трение качения.
Основным законом
сухого трения скольжения является
закон Амонтона:
максимальная
сила трения покоя
![]() пропорциональна прижимающей силе
пропорциональна прижимающей силе
![]() ,
(3.14)
,
(3.14)
где
![]() - коэффициент трения покоя,
- коэффициент трения покоя,![]() - сила нормального давления.
- сила нормального давления.
Аналогичная зависимость имеет место и для силы трения скольжения.
32
![]() ,
(3.15)
,
(3.15)
где
![]() – коэффициент трения скольжения.
– коэффициент трения скольжения.
Для вязкого трения справедливы следующие эмпирические законы:
1) при небольших скоростях (ламинарное движение)
![]() (3.16)
(3.16)
где
![]() -
коэффициент пропорциональности,
зависящий от геометрических параметров
тела, характера его поверхности и от
свойства среды, называемой вязкостью;
-
коэффициент пропорциональности,
зависящий от геометрических параметров
тела, характера его поверхности и от
свойства среды, называемой вязкостью;
2) при увеличении
скорости (3.16) постепенно переходит в
следующее выражение
![]() (3.17)
(3.17)
где
![]() орт скорости (турбулентное движение).
орт скорости (турбулентное движение).
Математическое выражение трения качения имеет вид
![]() (3.18)
(3.18)
где
![]() - прижимающая сила,
- прижимающая сила,![]() - радиус катящегося тела,
- радиус катящегося тела,![]() размерный коэффициент пропорциональности,
размерный коэффициент пропорциональности,![]() .
.
3.4.3. Силы инерции
Как уже отмечалось, в неинерциальных системах отсчета не выполняются законы Ньютона. Чтобы обойти эту трудность и применять законы динамики для любых систем отсчета, было предложено ввести специальные силы - силы инерции. Важно понять, что силу инерции вводят при описании движения только относительно неинерциальной системы. Особенность силы инерции состоит в том, что нельзя указать действием, со стороны каких тел она обусловлена.
Силы инерции возникают как при поступательном, так и при вращательном (криволинейном) движениях.
Если какая-то
система
![]() (например, вагон поезда) движется с
ускорением
(например, вагон поезда) движется с
ускорением![]() относительно другой системы отсчета
относительно другой системы отсчета![]()
![]() (Земля), то на любое тело массой
(Земля), то на любое тело массой![]() ,
находящееся в системе
,
находящееся в системе![]() будет действовать сила инерции:
будет действовать сила инерции:
![]() .
(3.19)
.
(3.19)
41
Движение тел в поле центральных (гравитационных) сил происходит в соответствии с законами Кеплера (для солнечной системы):
Первый закон: все планеты солнечной системы движутся по эллиптическим орбитам, в одном из фокусов которых находится Солнце.
Второй закон: радиус-вектор планеты в равные промежутки времени описывает равные площади.
Третий закон:
квадраты периодов Т обращения планет
вокруг Солнца прямо пропорциональны
кубам больших полуосей
![]() их орбит.
их орбит.
 .
(4.5)
.
(4.5)
Законы Кеплера можно обобщить на случай движения не только планет, но и любых материальных точек. В этом случае, однако, в соответствии с первым законом Кеплера материальная точка может двигаться не только по эллипсам, но и другим кривым второго порядка (окружности, параболе, гиперболе), а в соответствии с третьим законом, когда массами материальных точек пренебречь нельзя (как это было сделано с массами планет по сравнению с массой Солнца), уравнение (4.5) следует записать
 (4.6)
(4.6)
где
![]() и
и![]() массы материальных точек, обращающихся
вокруг центрального тела массой
массы материальных точек, обращающихся
вокруг центрального тела массой![]() .
.
4.3. Закон всемирного тяготения
Основываясь на
законах Кеплера, Ньютон в 1678 г. установил
закон всемирного тяготения, согласно
которому: две материальные точки массами
![]() и
и![]() притягиваются друг к другу с силой,
пропорциональной массам этих точек и
обратно пропорциональной квадрату
расстояния между ними:
притягиваются друг к другу с силой,
пропорциональной массам этих точек и
обратно пропорциональной квадрату
расстояния между ними:![]() ,
(4.7)
,
(4.7)
где
![]() - сила тяготения,
- сила тяготения,![]() - коэффициент пропорциональности,
называемый гравитационной постоянной.
В СИ
- коэффициент пропорциональности,
называемый гравитационной постоянной.
В СИ![]() =
=![]() ,
,![]() - расстояние между материальными точками.
- расстояние между материальными точками.
40
Никаких силовых
взаимодействий, кроме полевых, современная
физика не признает. Взаимодействия,
возникающие при соприкосновении тел,
являются частным случаем полевого
взаимодействия. Так, силы упругости и
силы трения являются электромагнитными,
то есть взаимодействия во всех этих
случаях осуществляются посредством
электромагнитных полей. Иногда эти поля
называют молекулярными. Они быстро
убывают с расстоянием и проявляются,
как правило, на расстояниях, не превышающих
10![]() м.
Поэтому-то такие полевые взаимодействия
и воспринимаются макроскопически как
"взаимодействия соприкосновения".
м.
Поэтому-то такие полевые взаимодействия
и воспринимаются макроскопически как
"взаимодействия соприкосновения".
4.2. Центральные силы. Законы Кеплера
Центральной силой называется сила, линия действия которой при любом положении тела проходит через некоторую определенную точку, называемую центром силы. Центральные силы зависят только от расстояния между телом и центром сил, то есть они являются консервативными.
Если центр сил
принять за начало координат, то центральная
сила
![]() ,
(4.2)
,
(4.2)
где
![]() - радиус-вектор, проведенный из центра
сил в рассматриваемую точку,
- радиус-вектор, проведенный из центра
сил в рассматриваемую точку,![]() - модуль радиуса-вектора,
- модуль радиуса-вектора,![]() -
проекция центральной силы на радиус-вектор,
-
проекция центральной силы на радиус-вектор,![]() -
единичный радиус-вектор.
-
единичный радиус-вектор.
Для центральных
сил притяжения![]() ,
для сил отталкивания
,
для сил отталкивания![]() .
.
Момент
![]() центральной силы относительно центра
сил тождественно равен нулю:
центральной силы относительно центра
сил тождественно равен нулю:
![]() .
(4.3)
.
(4.3)
Поэтому момент
импульса тела
![]() относительно центра сил не изменяется
при движении тела. Так как
относительно центра сил не изменяется
при движении тела. Так как![]() то
то
![]() (4.4)
(4.4)
Все выражения, описывающие движение под действием центральных сил, справедливы только для материальных точек.
Центральное взаимодействие осуществляется через посредство поля, называемого полем центральных сил, примером которого является гравитационное поле.
33
Так, шарик,
подвешенный на нити к потолку вагона
(см. рис.3.1.), отклонится при его ускорении
под действием
![]() в сторону, противоположную движущей
(или тормозящей) силе. При вращательном
движении системыК
в сторону, противоположную движущей
(или тормозящей) силе. При вращательном
движении системыК
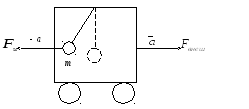

Рис. 3.1.
(вращение диска,
даже равномерное, с угловой скоростью
![]() )
в системе
)
в системе![]() (шарик на диске) возникает сила инерции,
которую называют центробежной.
Действительно, положим на горизонтальный
диск шарик массой
(шарик на диске) возникает сила инерции,
которую называют центробежной.
Действительно, положим на горизонтальный
диск шарик массой
![]() и начнем вращать диск. Шарик покатится
к периферии диска, то есть на него стала
действовать какая-то сила. Это и есть
центробежная сила инерции (см. рис.3.2.).
и начнем вращать диск. Шарик покатится
к периферии диска, то есть на него стала
действовать какая-то сила. Это и есть
центробежная сила инерции (см. рис.3.2.).
![]() (3.20)
(3.20)
г
![]()
![]() -
нормальное (центростремительное)
ускорение,
-
нормальное (центростремительное)
ускорение,![]() -
радиус диска.
-
радиус диска.


![]()

![]()
0
А




![]()
![]()
Рис. 3.2.
34
В то же время, если
система
![]() (шарик) движется поступательно со
скоростью
(шарик) движется поступательно со
скоростью![]() относительно вращающейся с угловой
скоростью
относительно вращающейся с угловой
скоростью![]() системы
системы![]() (горизонтальный диск), то наряду с
центробежной силой инерции возникает
еще одна сила –кориолисова
сила инерции (см.
рис.3.2). Эта сила зависит и от скорости
вращения диска
(горизонтальный диск), то наряду с
центробежной силой инерции возникает
еще одна сила –кориолисова
сила инерции (см.
рис.3.2). Эта сила зависит и от скорости
вращения диска
![]() и от
и от![]()
![]() (3.21)
(3.21)
где
![]() - кориолисово ускорение. Сила
- кориолисово ускорение. Сила
![]() заставит шарик двигаться по криволинейной
траектории ОА.(Пример. Подмывание берегов
рек,текущих не по земным параллелям)
заставит шарик двигаться по криволинейной
траектории ОА.(Пример. Подмывание берегов
рек,текущих не по земным параллелям)
3.5. Динамика вращательного движения
3.5.1. Центр
инерции
(центр масс) - геометрическая точка,
положение которой характеризует
распределение масс в твердом теле или
механической системе. Местоположение
центра инерции определяется
радиусом-вектором
![]() (см. рис. 3.3.), причем
(см. рис. 3.3.), причем
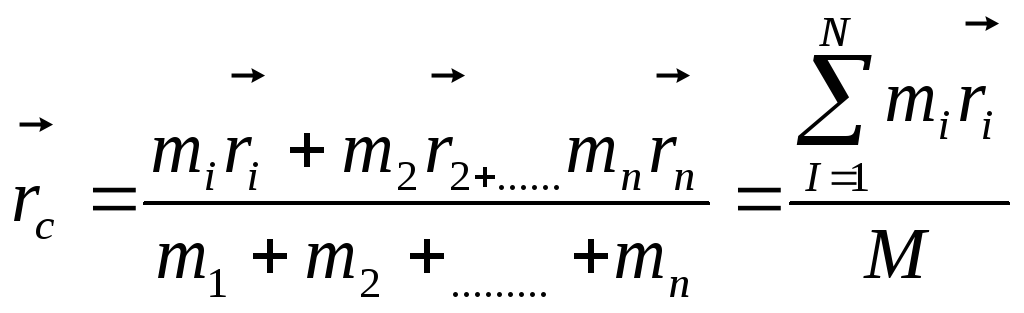 ,
,
![]() , (3.22)
, (3.22)

![]()
![]()

![]()
![]()

![]() y
y


![]()

![]()
![]()
![]()
![]()
![]()
![]()


![]()
![]()


 0
x
0
x
Рис. 3.3.
где
![]() - масса материальных точек, составляющих
твердое тело, или массы тел, входящих в
механическую систему;
- масса материальных точек, составляющих
твердое тело, или массы тел, входящих в
механическую систему;![]() -
радиусы-векторы,
-
радиусы-векторы,![]() -
масса всего твердого тела или системы.
-
масса всего твердого тела или системы.
Центр инерции для
твердого тела, находящегося в однородном
поле, совпадает с центром тяжести.
Скорость движения центра инерции
![]() находим дифференцированием по времени
находим дифференцированием по времени![]() выражения (3.22).
выражения (3.22).
39
![]()
![]()
![]() .
.
Если момент внешних сил равен нулю (например, для замкнутой механической системы), то момент импульса системы тел остается постоянным во времени.
В основе закона сохранения момента импульса лежит изотропия пространства – инвариантность физических законов относительно поворота замкнутой системы в пространстве на любой угол, то есть независимость свойств и законов движения тел от выбора направлений осей координат системы отсчета.
4. СИЛОВЫЕ ПОЛЯ, ЗАКОН ВСЕМИРНОГО ТЯГОТЕНИЯ.
ЭЛЕМЕНТЫ ТЕОРИИ ГРАВИТАЦИОННОГО ПОЛЯ
4.1. Силовые поля
Все взаимодействия осуществляются посредством особой формы материи - физическим полем. Оно может быть векторным или скалярным. Физическое поле связывает тела в единые системы и передает взаимодействие с конечной скоростью (в вакууме - со скоростью света). Поле, проявляющее себя в действии сил на различные тела, называют силовым полем. Каждое тело создает вокруг себя поле.
Силовому полю как одной из форм материи присущи ее свойства: пространственно-временная протяженность, инертность, движение, энергия, импульс.
Неизменяющееся
со временем силовое поле называется
стационарным; в противном случае -
нестационарным. Если силы, действующие
на тело, во всех точках поля одинаковы
по модулю и направлению (![]() ),
поле называют однородным.
),
поле называют однородным.
Силовое поле, в
котором работа сил поля
![]()
![]() зависит только от начального и конечного
положений тела и не зависит от вида его
траектории, называется потенциальным.
Отличительной особенностью потенциального
поля является равенство работы по
произвольной замкнутой траектории (по
замкнутому контуру
зависит только от начального и конечного
положений тела и не зависит от вида его
траектории, называется потенциальным.
Отличительной особенностью потенциального
поля является равенство работы по
произвольной замкнутой траектории (по
замкнутому контуру![]() )
нулю:
)
нулю:![]() (4.1)
(4.1)
где
![]() -
элементарное перемещение тела.
-
элементарное перемещение тела.
В физике рассматриваются три вида фундаментальных силовых полей: гравитационное, электромагнитное и ядерное.
38
Д![]() ля
случая, изображенного на рис. 3.4., момент
силы направлен вдоль оси вращения от
нас – обозначено . Модуль момента
силы
ля
случая, изображенного на рис. 3.4., момент
силы направлен вдоль оси вращения от
нас – обозначено . Модуль момента
силы
![]() .
(3.32)
.
(3.32)
Единица измерения
момента силы
![]() .
.
Для вывода основного
уравнения вращательного движения
воспользуемся выражением для момента
импульса
![]() .
Продифференцируем его:
.
Продифференцируем его:
![]() ,
,
![]()
![]()
![]() .
(3.33)
.
(3.33)
При выводе (3.33)
учтено, что
![]() и
и
![]() .
.
Соотношение (3.33) носит название основного уравнения вращательного движения.
Если тело в процессе
вращения не деформируется, а масса не
изменяется, то
![]()
![]() ;
;
![]() (3.34)
(3.34)
где
![]() – вектор углового ускорения.
– вектор углового ускорения.
3.5.5. Закон сохранения момента импульса.
Вывод этого закона аналогичен выводу закона сохранения импульса:
![]() Если
Если
![]() ,
то
,
то
![]() .
.
Обобщая, получаем
35
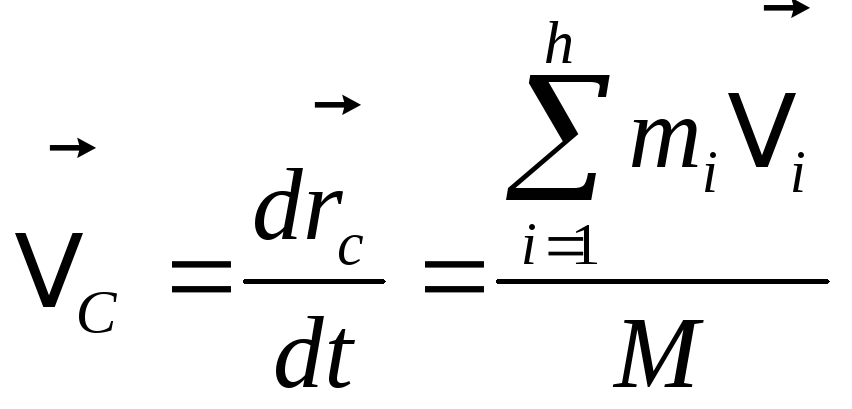 ,
(3.23)
,
(3.23)
где
![]() – скорость
– скорость![]() -ой
массы.
-ой
массы.
Если механическая
система замкнута, то центр инерции будет
двигаться с постоянной скоростью (![]() )
поскольку в числителе (3.23) - полный
импульс замкнутой системы, а он в данном
случае неизменен. Ускорение центра
инерции
)
поскольку в числителе (3.23) - полный
импульс замкнутой системы, а он в данном
случае неизменен. Ускорение центра
инерции![]() при этом равно нулю. В то же время, если
система незамкнута, налицо ускорение
центра инерции:
при этом равно нулю. В то же время, если
система незамкнута, налицо ускорение
центра инерции:
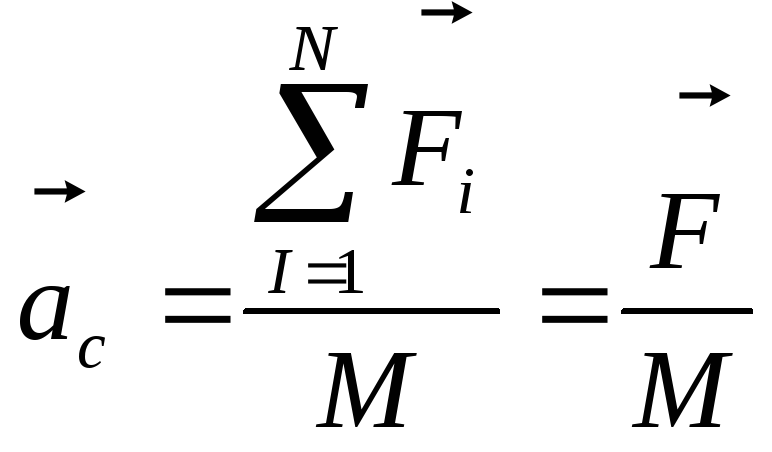 ,
(3.24)
,
(3.24)
где
![]() - внешняя сила, действующая на
- внешняя сила, действующая на![]() -ую
массу.
-ую
массу.
Выражения (3.22), (3.23), (3.24) исчерпывающим образом характеризуют движение центра инерции.
3.5.2. Момент
инерции
![]()
![]() - скалярная физическая величина,
характеризующая меру инертности тела
при вращательном движении. Она зависит
как от массы тела, так и характера
распределения массы в теле (или
механической системе).
- скалярная физическая величина,
характеризующая меру инертности тела
при вращательном движении. Она зависит
как от массы тела, так и характера
распределения массы в теле (или
механической системе).
В механике различают
центробежные и осевые моменты инерции
(мы будем иметь дело с последними). Момент
инерции тела относительно какой-то оси,
например y
(см. рис.3.3), определяется равенством
![]() =
=![]() ,
,
![]() (3.25)
(3.25)
где
![]() - момент инерции
- момент инерции![]() -ой
материальной точки.
-ой
материальной точки.
В справочниках
приводятся моменты инерции тел различной
формы относительно оси, проходящей
через их центр инерции
![]() .
Например, для сплошного цилиндра
.
Например, для сплошного цилиндра
![]() ,
для полого цилиндра (трубы)
,
для полого цилиндра (трубы)![]() ,
для шара
,
для шара![]() ,
для стержня.
,
для стержня.
36
(параллелепипеда)
-
![]() ,
где
,
где![]() - масса,R
- радиус,
- масса,R
- радиус,
![]() - длина тела.
- длина тела.
Если же ось вращения
проходит не через центр инерции
![]() ,
то момент инерции относительно этой
оси
,
то момент инерции относительно этой
оси![]() вычисляется потеореме
Штейнера:
вычисляется потеореме
Штейнера:
![]() ,
(3.26)
,
(3.26)
где
![]() - масса тела,
- масса тела,![]() - расстояние между данной осью 0-0 и осью,
проходящей через центр инерции.
- расстояние между данной осью 0-0 и осью,
проходящей через центр инерции.
Так, для стержня
массой
![]() и длиной
и длиной![]()
![]() ,
вращающегося вокруг оси, проходящей
через один из его концов
,
вращающегося вокруг оси, проходящей
через один из его концов![]() .
.
3.5.3. Момент импульса
В дальнейшем мы сначала будем получать выражения для физических величин, характеризующих материальную точку, а затем, в силу аддитивности, суммированием этих величин перейдем к характеристикам твердого тела.
Для описания вращательного движения твердого тела недостаточно иметь такие физические величины, как масса, импульс, сила. Необходимо ввести еще моменты инерции, импульса, силы.
Момент импульса
![]() - векторная физическая величина,
характеризующая меру вращательного
движения.
- векторная физическая величина,
характеризующая меру вращательного
движения.
Различают момент
импульса относительно центра (точки) и
относительно оси вращения. В общем
случае момент импульса
![]() - ой материальной точки равен векторному
произведению
- ой материальной точки равен векторному
произведению
![]() ,
,
где
![]() - радиус-вектор
- радиус-вектор![]() - ой материальной точка (см. рис. 3.3.),
- ой материальной точка (см. рис. 3.3.),
![]() - её импульс,
- её импульс,
![]() и
и![]() - масса и скорость движения этой точки.
- масса и скорость движения этой точки.
Момент импульса вращающегося твердого тела относительно неподвижной оси
![]() ,
(3.28)
,
(3.28)
37
где
![]() - масса
- масса![]() -ой точки,
-ой точки,![]() - радиус-вектор до
- радиус-вектор до![]() -ой
точки,
-ой
точки,![]() -
момент инерции материальной точки,
-
момент инерции материальной точки,![]() - момент инерции тела. В (3.28) учтено, что
угловая скорость постоянна (
- момент инерции тела. В (3.28) учтено, что
угловая скорость постоянна (![]() ).
).
![]() .
.
3.5.4. Момент силы. Основное уравнение вращательного движения.
Момент силы
![]() - векторная физическая величина,
характеризующая вращательный эффект
силы при действии её на твердое тело
- векторная физическая величина,
характеризующая вращательный эффект
силы при действии её на твердое тело
Как и для момента импульса, различают момент силы относительно центра (точки) и относительно оси вращения.
Момент силы
![]() равен векторному произведению
радиуса-вектора
равен векторному произведению
радиуса-вектора![]() ,
проведенного из точкиО
в точку приложения силы на вектор этой
силы
,
проведенного из точкиО
в точку приложения силы на вектор этой
силы
![]() (см. рис. 3.4.)
(см. рис. 3.4.)![]() .
(3.29)
.
(3.29)
Если силу
![]() разложить на две составляющие: по
касательной к траектории движения (к
окружности)
разложить на две составляющие: по
касательной к траектории движения (к
окружности)![]() и перпендикулярно (нормально) к ней (по
радиусу окружности)
и перпендикулярно (нормально) к ней (по
радиусу окружности)![]() ,
то как видим на рис. 3.4.
,
то как видим на рис. 3.4.
![]() ,
(3.30)
,
(3.30)
Подставив (3.30) в
(3.29)), получим
![]() .
.

![]()
![]()
А![]()








![]()
0
![]()
![]()

Рис. 3.4.
Но, поскольку
![]() =0,
следовательно
=0,
следовательно![]() .
(3.31) То есть, для определения
момента силы достаточно знать только
тангенциальную (касательную) составляющую
силы
.
(3.31) То есть, для определения
момента силы достаточно знать только
тангенциальную (касательную) составляющую
силы![]() .
Направление вектора
.
Направление вектора![]() находится по правилу правого винта (см.
п.п. 1.6.6).
находится по правилу правого винта (см.
п.п. 1.6.6).