

2.2 Кинематика материальной точки.
Основной задачей кинематики является описание движений относительно системы отсчета.
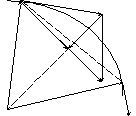
Получим сперва формулы для неравномерного криволинейного движения, то есть для самого общего случая движения материальной точки. А затем рассмотрим частные случаи: вращательное, прямолинейное, равномерное и равнопеременное движения. Предположим, материальная точка за время ∆t = t2 – t1 перемещается из
53
Здесь учтено, что
угол
![]() между
между![]() и
и![]() равен
равен![]() и
и![]()
 (5.18)
(5.18)
Сравнивая левые
и правые части данной системы уравнений,
получаем:
![]() .
(5.19)
.
(5.19)
То есть потенциальная энергия взаимно тяготеющих (притягивающихся) тел отрицательна. Потенциальная энергия отталкивающихся тел, к примеру, двух одноименно заряженных тел, - положительна. (Предлагается студентам вывести соотношение для этого случая).
Теперь получим формулу для Wп(h), когда в качестве начального состояния выбрана потенциальная энергия при нахождении тела не в бесконечности, а на поверхности Земли (при h0 = 0; Wп(h0)= 0):
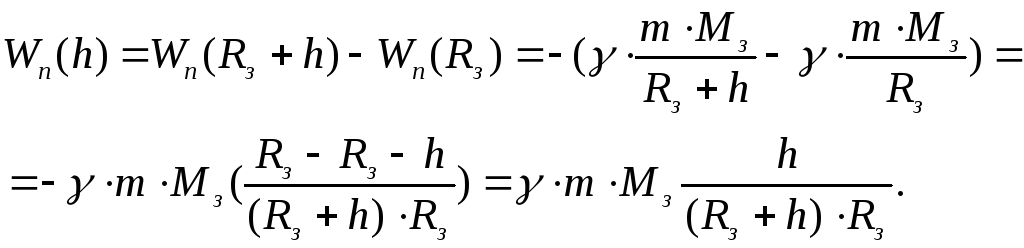 (5.20)
(5.20)
Если h
<< Rз
, то
![]() ,
(5.21)
,
(5.21)
здесь учтена формула (4.15).
5.5. Закон сохранения механической энергии
В изолированной системе кроме полного импульса сохраняющейся величиной является и механическая энергия.
Допустим, два тела
массами m1
и m2
под действием консервативных сил
![]() и
и![]() движутся со скоростями
движутся со скоростями![]() и
и![]() ,
тогда
,
тогда
![]() ,
,
![]() .
(5.22)
.
(5.22)
При этом тела за какое-то время t совершат перемещения:
![]() ,
,
![]() .
(5.23)
.
(5.23)
52
Согласно этому условию, если внутренние силы совершают положительную работу (А > 0), то потенциальная энергия системы уменьшается Wп2 < Wп1 ; например, при падении камня на Землю с высоты, при перемещении поршня расширяющимся паром, при сжатии растянутой пружины и т.п. Если же работа внутренних сил А < 0, то потенциальная энергия системы увеличивается (Wп2 > Wп1).
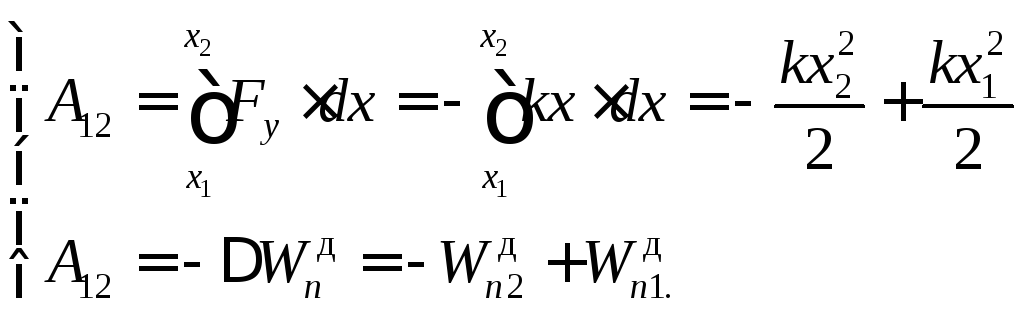
5.4.1. Потенциальная энергия упруго деформированного тела.
Если, например,
растянуть пружину внешней силой F
= kx
, то возникнет
сила упругости Fy
= - kx
, которая
будет являться внутренней силой. Сила
Fy
, сжимая пружину, совершит положительную
работу A
> 0 за счет уменьшения потенциальной
энергии
![]() пружины. Согласно (5.11) имеем
пружины. Согласно (5.11) имеем
 .
(5.15)
.
(5.15)
Опустив индексы,
получим потенциальную энергию
деформированной пружины
![]() .
(5.16)
.
(5.16)
К тому же результату
придем, если за начало отсчета принять
положение свободного конца пружины,
когда она находится в недеформированном
состоянии, то есть X2
= 0; при этом начальная потенциальная
энергия
![]() также равна нулю.
также равна нулю.
5.4.2. Потенциальная энергия гравитационного притяжения двух тел
Рассмотрим два
тела (являющиеся материальными точками)
массами m1
и m2,
притягивающиеся друг к другу (например,
камень и Земля) с силой
![]() .
.
При приближении этих тел будет производиться положительная работа. В соответствии с (5.11) имеем:
 .
(5.17)
.
(5.17)
21
положения 1 в положение 2 (рис. 2.2). Очевидно, что перемещение
∆![]() =
=
![]() –
–![]() .
(2.2)
.
(2.2)

 1
Разделив ∆
1
Разделив ∆![]() на соответствующий
на соответствующий
промежуток времени ∆t , получим
3 вектор средней скорости:
![]()
![]() ср
= ∆
ср
= ∆![]() /
∆t.
(2.3)
/
∆t.
(2.3)
![]() ∆
∆![]() Кроме
этой скорости, средней для
Кроме
этой скорости, средней для
![]() 2
участка пути 1
– 2, используют
в той
2
участка пути 1
– 2, используют
в той
или иной точке пути (например, в
0 положении 3), называемую мгновенной
Рис. 2.2. скоростью. Из высшей математики известно, что для определения мгновенной скорости нужно взять предел средней скорости при ∆t→0:
![]() =
=ℓim
![]() ср
= ℓim
∆
ср
= ℓim
∆![]() /∆t
= d
/∆t
= d![]() /dt.
(2.4)
/dt.
(2.4)
∆ t→0 ∆ t→0
Таким образом,
вектор мгновенной скорости равен
производной по времени от радиуса-вектора
![]() движущейся материальной точки. Так как
в пределе длина хорды |d
движущейся материальной точки. Так как
в пределе длина хорды |d![]() |
стремится к длине стягиваемой дугиdℓ,
то модуль скорости
|
стремится к длине стягиваемой дугиdℓ,
то модуль скорости
![]() =|
=|![]() |=
|d
|=
|d![]() |
/dt
= dℓ
/dt
= ds/
t
(2.5)
|
/dt
= dℓ
/dt
= ds/
t
(2.5)
Направление вектора
скорости
![]() есть, как требует определение (2.4), предел
направления хорды (совпадающей по
направлению с ∆
есть, как требует определение (2.4), предел
направления хорды (совпадающей по
направлению с ∆![]() )
при уменьшении ее длины (стягивании в
точку). А это есть направление касательной
к траектории.
)
при уменьшении ее длины (стягивании в
точку). А это есть направление касательной
к траектории.
Следовательно, в общем случае вектор мгновенной скорости в каждой точке траектории касателен к ней.
Физический смысл скорости: скорость – векторная физическая величина, характеризующая быстроту изменения перемещения материальной точки в пространстве.
При произвольном
движении вектор скорости
![]() непрерывно меняется как по величине,
так и по направлению (рис. 2.3).
непрерывно меняется как по величине,
так и по направлению (рис. 2.3).
Векторная физическая
величина, характеризующая быстроту
изменения скорости, называется ускорением
![]() .
.
Формулу для
определения ускорения неравномерного
криволинейного движения можно получить
из следующих соображений. Если обозначить
скорость материальной точки в
вектор
![]() 2
в точку А параллельно самому себе, можно
найти приращение ∆
2
в точку А параллельно самому себе, можно
найти приращение ∆![]() :
:
∆![]() =
=
![]() 2
–
2
–![]() 1
.
(2.6)
1
.
(2.6)
22
Р азложим
вектор ∆
азложим
вектор ∆![]() на
два составляющие:
на
два составляющие:
вектор
∆![]()
– касательный
– касательный
 А
А
![]() 1
к
траектории рассматриваемой
1
к
траектории рассматриваемой
![]() С
кривой
и вектор
С
кривой
и вектор
![]() n
–
n
–
![]()
![]()
![]() перпендикулярный
∆
перпендикулярный
∆![]() ,
то
есть
,
то
есть
В направленный к центру кривизны
траектории О. При этом
∆![]() ∆
∆![]() =
=![]() +∆
+∆![]() .
(2.7)
.
(2.7)
D Среднее ускорение за
![]() промежуток
времени
∆t:
промежуток
времени
∆t:
О Рис.
2.3.
![]()
![]() =
∆
=
∆![]() /∆t
=
/∆t
=
![]() /∆t
+ ∆
/∆t
+ ∆![]() /∆t.
(2.8)
/∆t.
(2.8)
Мгновенное ускорение:
![]() =ℓim
=ℓim
![]() =ℓim
=ℓim![]() /∆t
+ ℓim
∆
/∆t
+ ℓim
∆![]() /∆t
=
/∆t
=![]() +
+![]() ,
(2.9),где
введены обозначения:
,
(2.9),где
введены обозначения:
![]() =ℓim
=ℓim![]() /∆t,
/∆t,
![]() =ℓim
∆
=ℓim
∆![]() /∆t.
(2.10)
/∆t.
(2.10)
∆ t→ 0 ∆ t→ 0
Вектор
![]() носит
название нормального
(или центростремительного) ускорения,
вектор
носит
название нормального
(или центростремительного) ускорения,
вектор
![]() называют
тангенциальным
(или касательным) ускорением.
Эти названия следуют из выражений
(2.10), поскольку
∆
называют
тангенциальным
(или касательным) ускорением.
Эти названия следуют из выражений
(2.10), поскольку
∆![]() n
нормален,
а ∆
n
нормален,
а ∆![]()
касателен
к траектории.
касателен
к траектории.
Модуль нормального ускорения можно определить по рис.2.3, учтя, что треугольник AOD и АВС подобны:
аn
=|![]() |
=
|
=
![]() /
r,
(2.11)
/
r,
(2.11)
где r – радиус кривизны траектории. (Вывод этой формулы представляется сделать студентам самостоятельно).
Надо отметить, что уравнение (2.11) является общим, то есть справедливым для движения по любой кривой: эллипсу, параболе, окружности и др., а также для равномерного, равнопеременного и неравномерного движений. Это вытекает из того, что при выводе (2.11) не было наложено никаких ограничений на вид траектории и характер движения.
Модуль
тангенциального ускорения
а
=|![]() |
=d
|
=d![]() /dt.
(2.12)
/dt.
(2.12)
Нормальное и тангенциальное ускорения зависят от вектора скорости неоднозначно. Так, нормальное ускорение возникает только при изменении направления скорости, а тангенциальное ускорение – при изменении модуля скорости.
51
По второму закону
Ньютона
![]() .
Решая систему уравнений (5.11), получаем:
.
Решая систему уравнений (5.11), получаем:

Опуская индексы,
имеем![]() (при
m=const)
(5.13).
(при
m=const)
(5.13).
Этот же результат получим при предположении, что тело начало движение из состояния покоя.
Если А > 0, то Wk2 > Wk1 , то есть положительная работа внешней силы увеличивает кинетическую энергию тела. Наоборот, при А < 0 Wk2 < Wk1, то есть отрицательная работа внешних сил выступающих как силы сопротивления или торможения, уменьшает кинетическую энергию.