

1.6.1. Умножение векторной величины на скаляр.
Умножение вектора
![]() на скаляр а
дает вектор а
на скаляр а
дает вектор а![]() .
При этом
направление
.
При этом
направление
![]() сохраняется с точностью до знака.
Модуль вектора а
сохраняется с точностью до знака.
Модуль вектора а![]() равен |а
равен |а![]() |
= |a|·|
|
= |a|·|![]() |
= |a|·
|
= |a|·![]() .
(1.1)
.
(1.1)
1.6.2. Сложение двух векторных величин.
Два вектора
![]() и
и
![]() при сложении дают вектор
при сложении дают вектор
![]() =
(
=
(![]() +
+![]() ).
Сложение векторов отвечает геометрическому
сложению направленных отрезков (правило
параллелограмма), рис. 1.2. Длина вектора
в общем случае определяется по теореме
косинусов
).
Сложение векторов отвечает геометрическому
сложению направленных отрезков (правило
параллелограмма), рис. 1.2. Длина вектора
в общем случае определяется по теореме
косинусов



 α
(|
α
(|![]() |)2
= r2
= r
|)2
= r2
= r![]() +
r
+
r![]() – 2
r
– 2
r![]() ·
r
·
r
![]() ·cos
α.
·cos
α.
![]()
![]() r
= √
r
r
= √
r![]() +
r
+
r![]() –
2 r
–
2 r![]() ·
r
·
r![]() ·cosα
. (1.2)
·cosα
. (1.2)
Для
нормальных векторов
![]()
![]()


![]() =
=
![]() +
+![]()
![]() =
√
r
=
√
r![]() +
r
+
r![]() .
(1.3)
.
(1.3)
14
1.6.3. Вычитание векторных величин.
Разность двух
векторов
![]() и
и
![]() называется
такой вектор
называется
такой вектор
![]() =
=
![]() –
–
![]() ,
который в сумме с вектором
,
который в сумме с вектором
![]() дает вектор
дает вектор
![]() ,
т. к.
,
т. к.
![]() –
–
![]() =
=
![]() +(–
+(–![]() )
(рис. 1.3).
)
(рис. 1.3).





![]()
![]()
![]()


(–![]() )
)
![]()
Рис. 1.3.
1.6.4. Разложение векторных величин
на составляющие.
Каждый вектор
![]() можно заменить несколькими векторами
можно заменить несколькими векторами
![]() ,
,![]() ,
,![]() ,
…., которые в
сумме дают вектор
,
…., которые в
сумме дают вектор
![]() .В
этом случае
.В
этом случае
![]() ,
,![]() ,
,![]() , и т.д. называются
составляющими вектора
, и т.д. называются
составляющими вектора
![]() .
.
Проекции вектора
![]() на оси декартовой системы координат
показаны на рис.1.4.
на оси декартовой системы координат
показаны на рис.1.4.
z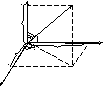
x
= |![]() |·cos
α,
|·cos
α,
z
![]() y
= |
y
= |![]() |·cos
β,
|·cos
β,
γ
z
= |![]() |·cos
γ.
|·cos
γ.(1.4)
0
α x
y β x
y
Рис. 1.4.
Радиусом-вектором
точки называется вектор
![]() (см. рис. 1.4), проведённый из начала
координат в данную точку. Радиус-вектор
(см. рис. 1.4), проведённый из начала
координат в данную точку. Радиус-вектор
![]() однозначно определяет положение точки
в пространстве.
однозначно определяет положение точки
в пространстве.
59
где знак минус
учитывает противоположные направления
перемещения (смещения) и силы Fy,
a
![]() ,
т. к. первоначально маятник был отклонен
на малый угол.
,
т. к. первоначально маятник был отклонен
на малый угол.
С другой стороны,
Fy-
можно определить по второму закону
Ньютона:
![]()
![]() ,
или
,
или![]() .
.
Тогда
![]() ,
(6.13)
,
(6.13)
где
![]() .
(6.14)
.
(6.14)
Выражение (6.13) является дифференциальным уравнением колебаний математического маятника, решением которого будет
![]() .
.
Учитывая (6.4) и
подставляя вместо
![]() её значение из (6.14) получим формулу для
периода колебаний математического
маятника:
её значение из (6.14) получим формулу для
периода колебаний математического
маятника:
![]() .
(6.15)
.
(6.15)
Заметим, что период математического маятника не зависит не только от амплитуды (изохронность), но и от массы маятника.
6.3.3. Физический маятник - это любое тело (не представляющее собой материальную точку), колеблющееся относительно оси, которая не проходит через центр инерции С (рис.6.3).
Если центр инерции расположен на расстоянии l от оси вращения, то момент силы тяжести
![]() .
(6.16)
.
(6.16)
Э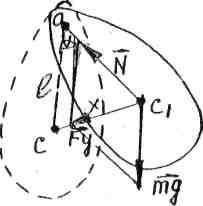 тот
момент силы заставляет отклоненный
маятник вернуться в исходное состояние
и продолжить движение в другую сторону,
поэтому уравнение его движения будет
иметь вид:
тот
момент силы заставляет отклоненный
маятник вернуться в исходное состояние
и продолжить движение в другую сторону,
поэтому уравнение его движения будет
иметь вид:
![]() .
(6.17)
.
(6.17)
Здесь учтен основной закон вращательного
движения:
Рис.6.3.
![]() ,
(6.18)
,
(6.18)
58