

5.4. Потенциальная энергия
Потенциальная энергия Wn - скалярная физическая величина характеризующая меру взаимодействия тел. Потенциальная энергия – энергия положения, зависящая от взаимного расположения взаимодействующих тел. Если кинетическая энергия может служить характеристикой даже одного тела, то потенциальная энергия - энергия взаимодействия как минимум двух тел. Например, части пружины взаимодействуют друг с другом, взаимно отталкиваясь при её сжатии . и взаимно притягиваясь при её растяжении. Значит, деформированная пружина обладает потенциальной энергией взаимодействия её частей. Система камень и Земля, взаимно притягиваясь в соответствии с законом всемирного тяготения, обладает потенциальной энергией. Неточно говорить в этом случае о потенциальной энергии только одного камня, как это часто, к сожалению, делается.
Поскольку силы взаимодействия зависят от расстояния между телами, то и говорят, что потенциальная энергия - энергия положения. Условимся называть потенциальной энергией системы (тел) физическую величину Wп, уменьшение которой равно положительной работе внутренних сил: Wn1 - Wn2 = A или A = - (Wn2 - Wn1), (5.14)
где Wn1 – начальное значение потенциальной энергии, Wn2 – её конечное значение.
50
![]() .
(5.9)
.
(5.9)
5.2. Энергия
Энергия W - скалярная физическая величина, количественно характеризующая меру движения и взаимодействия всех видов материи. Энергия в изолированной системе не возникает из ничего и не исчезает, она может только переходить из одной формы в другую - это один из наиболее фундаментальных законов природы (Закон Ломоносова).
В соответствии с различными видами движения материи существуют разные формы энергии: механическая, внутренняя, электромагнитная, ядерная и др. Это деление несколько условно. Так, внутренняя энергия складывается из кинетической энергии хаотического движения молекул, атомов относительно центра масс тела и потенциальной энергии взаимодействия этих частиц друг с другом.
Упомянутые выше кинетическая и потенциальная энергии являются разными видами механической энергии.
Механическая энергия - скалярная физическая величина, характеризующая способность тела совершать работу:
![]() ,
(5.I0)
,
(5.I0)
Для вывода любого вида энергии удобно пользоваться одним и тем же приемом: сначала определить работу по (5.3), а затем с помощью (5.10) перейти к энергии, т.е., решить систему уравнений:
 (5.11) а из сопоставления
уравнений (5.11) следует
(5.11) а из сопоставления
уравнений (5.11) следует
![]() .
(5.12)
.
(5.12)
То есть элементарная
энергия (или ее изменение) равна скалярному
произведению силы
![]() на элементарное перемещение
на элементарное перемещение![]() .
.
5.3. Кинетическая энергия
Кинетическая энергия Wk - скалярная физическая величина, характеризующая меру механического движения тела. Кинетическая энергия - энергия движения, определяемая массой тела и его скоростью.
Рассмотрим движущееся под действием силы (или равнодействующей нескольких сил) тело массой m.
23
Модуль общего ускорения а найдем по формуле (2.9) и рис. 2.4

 а
=
а
=
![]() = √ а²n+
a²
.
(2.13)
= √ а²n+
a²
.
(2.13)
![]() Частные
случаи
Частные
случаи
![]() 1).
1).
![]() =
0. Это возможно
=
0. Это возможно
только при r = ∞ (см. (2.11)), то
есть траектория – прямая линия.
![]() Вывод:
при прямолинейном
Вывод:
при прямолинейном
![]() движении
нормальное ускорение
движении
нормальное ускорение
отсутствует.
0 Рис. 2.4.
2).
![]() =
0. Это возможно
=
0. Это возможно
(согласно (2.12)),
когда |![]() |
= const,
то есть при равномерном движении.
Нормальное ускорение при этом постоянно
(см. (2.11)). Таким образом, всякое движение
ускоренное (движение по инерции).
|
= const,
то есть при равномерном движении.
Нормальное ускорение при этом постоянно
(см. (2.11)). Таким образом, всякое движение
ускоренное (движение по инерции).
3).
![]() =
0,
=
0,
![]() =
0. Следовательно,
=
0. Следовательно,
![]() =0,
=0,
![]() ,
r
=
,
r
=![]() ,
то есть данное движение – равномерное
и прямолинейное.
,
то есть данное движение – равномерное
и прямолинейное.
Обобщим вышесказанное:
Равномерное прямолинейное движение.
(![]() =const,
=const,
![]() =
0,
=
0,
![]() =
0). При этом перемещение
=
0). При этом перемещение
![]() можно
найти по (2.4), а путь по (2.5):
можно
найти по (2.4), а путь по (2.5):
![]() ;
;
 ;
;![]() ;
;![]() ,
(2.14)
,
(2.14)
|d![]() |=
|=![]() ;
; ;
;![]() .
(2.15)
.
(2.15)
Если при t
= 0 тело
находится в начале координат, то
![]() ;
;![]() .
.
Равнопеременное прямолинейное движение.
(![]() const,
const,
![]() =
0,
=
0,
![]() =
const).
=
const).
![]() ;
;
 ;
;
![]() (2.16)
(2.16)
 (2.17)
(2.17)
24
Неравномерное прямолинейное движение
![]() ;
;
![]() . (общие
уравнения кинематики) (2.18)
. (общие
уравнения кинематики) (2.18)
Равномерное движение по окружности
(
![]() ,
но
,
но
![]() ;
;
![]() ,
,
![]() ,
,
![]() ).
).

![]()
![]() В
данном случае удобно перейти
В
данном случае удобно перейти

 к
угловым величинам:
к
угловым величинам:

![]()
![]()
![]() - угловое перемещение,
- угловое перемещение,




![]()
![]()
![]() -
угловая скорость,
-
угловая скорость,
0
![]()
![]() - угловое ускорение.
- угловое ускорение.
На рис. 2.5 видно, что
![]() ,
,
![]() ,
(2.19)
,
(2.19)
Рис.
2.5. где
![]() - перемещение,
- перемещение,![]() -
радиус окружности,
-
радиус окружности,![]() и
и![]() - радиус-векторы.
- радиус-векторы.
Угловой скоростью называют векторную физическую величину, характеризующую быстроту изменения углового перемещения:
![]() .
(2.20)
.
(2.20)
Аналогично, угловое
ускорение
![]() .
(2.21)
.
(2.21)
С помощью (2.19) можно
найти связь между
![]() и с соответствующими линейными величинами
и с соответствующими линейными величинами
![]() и
и
![]() :
:
![]() ,
,
![]() ,
(2.22)
,
(2.22)
![]() ,
,
![]() .
(2.23)
.
(2.23)
Поскольку
![]() и
и![]() - величины векторные, направление которых
находится по правилу правого винта, то
налицо векторные произведения
соответствующих векторов:
- величины векторные, направление которых
находится по правилу правого винта, то
налицо векторные произведения
соответствующих векторов:
![]() ;
;
![]() .
(2.24)
.
(2.24)
К вращательному движению применимы все формулы поступательного (прямолинейного) движения (см. (2.14) – (2.18)) при
49
Мощность N – скалярная физическая величина, характеризующая, быстроту (скорость) совершения работы:
![]()
![]() при
при
![]() .
(5.5)
.
(5.5)
Учтя (5.1), получим
еще одно выражение для определения
мощности:
![]() (5.6)
(5.6)
где
![]() - скорость перемещения тела. За единицу
измерения работы в СИ принят джоуль:
[А]
= [F]·[
- скорость перемещения тела. За единицу
измерения работы в СИ принят джоуль:
[А]
= [F]·[![]() ]=Н·м
= Дж. Единица измерения мощности - ватт:
[N]
= [A]/[t]
= Дж/с = Bт.
]=Н·м
= Дж. Единица измерения мощности - ватт:
[N]
= [A]/[t]
= Дж/с = Bт.
Вcе силы, встречающиеся в макроскопической механике, подразделяются на консервативные (потенциальные) и неконсервативные.
К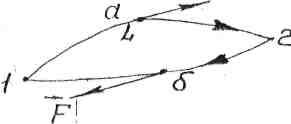 онсервативными
называются силы,
работа которых зависит только от
начального и конечного положений тела.
Причем работа консервативной силы по
произвольной замкнутой траектории
(контуру) L
равна
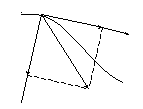
нулю. Это следует из рассмотрения
рис.5.3. изменение направления движения
тела например,
онсервативными
называются силы,
работа которых зависит только от
начального и конечного положений тела.
Причем работа консервативной силы по
произвольной замкнутой траектории
(контуру) L
равна
нулю. Это следует из рассмотрения
рис.5.3. изменение направления движения
тела например,
в точке 2 вызывает изменение знака проекции консервативной
силы ![]() и знака её работы, то есть
Рис. 5.3.
и знака её работы, то есть
Рис. 5.3.
![]()
![]() .
Поэтому
.
Поэтому![]() ,
,
или
![]() .
(5.7)
.
(5.7)
В этой формуле
знак
![]() указывает на то, что интегрирование
проводится по замкнутому контуруL
(см. также п. 4.1).
указывает на то, что интегрирование
проводится по замкнутому контуруL
(см. также п. 4.1).
В качестве примера
рассмотрим работу, совершаемую при
перемещении тела в поле центральных
сил (см. п. 4.2), например, в гравитационном
поле. Докажем, что центральные силы
консервативны, то есть
![]() ,
(5.8)
,
(5.8)
где учтено уравнение (4.2).
Действительно,
так как
![]() ,
то
,
то![]() ,
a
,
a (тело вышло из точки1
и вернулось в эту же точку), то
(тело вышло из точки1
и вернулось в эту же точку), то
48
Из (5.3) явствует, что сила не совершает работу в следующих случаях:
l) когда точка приложения силы неподвижна (тело покоится)
и r = const, a dr = 0;
2) если сила
направлена по нормали к перемещению
(угол![]() ),
например, центростремительная сила
работы не совершает.
),
например, центростремительная сила
работы не совершает.
Работу производит
лишь тангенциальная (касательная)
составляющая силы. При этом, если
![]() <
<![]() (см.рис. 5.1.а), то А
> 0, если
(см.рис. 5.1.а), то А
> 0, если
![]() >
>![]() (см.рис.5.1,б), тоА
< 0.
(см.рис.5.1,б), тоА
< 0.
![]()


![]()
![]() 0
0
Рис. 5.1. б/


r


Рис.
5.2.
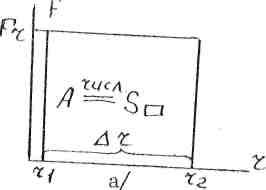
Когда сила F
постоянна на перемещении
![]() (рис. 5.2, a), то
(рис. 5.2, a), то
 .
(5.4)
.
(5.4)
На рис.5.2,а видно,
что работа постоянной силы соответствует
площади прямоугольника со сторонами
Fr
и
![]() .
.
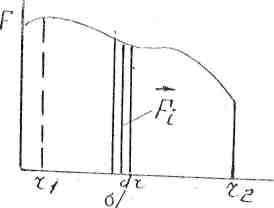
Если же сила различна в разных точках пути, то работа (см. рис. 5.2, б) численно равна площади криволинейной трапеции; аналитически она представляется формулой (5.3).
25
замене в них
линейных величин
![]() на угловые (см. (2.19), (2.20), (2.21), (2.24)).
на угловые (см. (2.19), (2.20), (2.21), (2.24)).
Период вращенияТ– этовремя
одного оборота(при этом![]() ),
гдеN– число оборотов.
),
гдеN– число оборотов.
Частота вращения–число оборотов
в секунду:![]() .
.
Учитывая эти определения, а также (2.21), получаем:
![]()
![]() .
(2.25)
.
(2.25)
Векторы
![]() ,
,![]() и
и![]() направлены вдоль оси, перпендикулярной
плоскости вращения и проходящей через
центр окружности.
направлены вдоль оси, перпендикулярной
плоскости вращения и проходящей через
центр окружности.
При ускоренном
движении все эти три вектора сонаправлены;
при замедленном (торможении) -
![]() имеет направление противоположное
имеет направление противоположное![]() и
и![]() .
.