

7.3. Мгновенный центр скоростей.
Теорема: Если тело совершает плоское движение, то всегда имеется такая точка, жестко связанная с телом, скорость которой в данный момент времени равна нулю. Такая точка называется мгновенным центром скоростей (МЦС).
МЦС лежит на пересечении перпендикуляров к векторам скоростей двух каких-нибудь точек тела (рис. 2.26).
Д окажем,
что скорость точки Р(МЦС)
окажем,
что скорость точки Р(МЦС)![]() .
Предположим, что
.
Предположим, что![]() .
Тогда по теореме о проекциях скоростей
точек на прямую их соединяющую вектор
.
Тогда по теореме о проекциях скоростей
точек на прямую их соединяющую вектор![]() должен быть перпендикуляренAP,
так как
должен быть перпендикуляренAP,
так как![]() .
С другой стороны
.
С другой стороны![]() должен быть перпендикуляренBP,
так как
должен быть перпендикуляренBP,
так как![]() .
Получаем противоречие: вектор
.
Получаем противоречие: вектор![]() должен быть одновременно перпендикулярен
непараллельным отрезкамAPиBP, что невозможно.
Следовательно
должен быть одновременно перпендикулярен
непараллельным отрезкамAPиBP, что невозможно.
Следовательно![]() ,
что и требовалось доказать.
,
что и требовалось доказать.
Свойства МЦС.
Запишем уравнения для определения скоростей точек А и В, приняв МЦС за полюс:
![]()
![]() ,
,
|
|
(2.31) |
Очевидно
![]() ,
,![]() ,
откуда
,
откуда
|
|
(2.32) |
Из (2.31) и (2.32) вытекают следующие свойства МЦС:
Скорости точек тела при плоском движении прямопропорциональны их расстояниям до МЦС.
Скорости точек перпендикулярны отрезкам, соединяющим эти точки с МЦС.
Частные случаи определения МЦС.
Скорости точек AиBтела составляют одинаковый угол с прямойAB(рис. 2.27). Очевидно при этом
 ,
, ,
то есть в этом случае тело совершает
мгновенно поступательные движения.
,
то есть в этом случае тело совершает
мгновенно поступательные движения.
2 .
Скорости точекAиBтела перпендикулярны отрезкуABи не равны. На основе (2.32) МЦС находится
так, как показано на рис. 2.28.
.
Скорости точекAиBтела перпендикулярны отрезкуABи не равны. На основе (2.32) МЦС находится
так, как показано на рис. 2.28.
3. Скорости точек А и В перпендикулярны отрезку ABи направлены в противоположные стороны. МЦС определяется так, как показано на рис. 2.29.
4
 .
Колесо катится без скольжения прямолинейно.
В данном случае МЦС находится в точке
касания А (рис. 2.30).
.
Колесо катится без скольжения прямолинейно.
В данном случае МЦС находится в точке
касания А (рис. 2.30).
7.4. Определение ускорений точек тела
Запишем основное уравнение для определения скорости точки:
![]() .
.
Для определения
ускорения точки М вычислим векторную
производную от уравнения (2.30) при этом
примем во внимание, что вектор
![]() изменяет только свою величину:
изменяет только свою величину:
![]()
|
|
(2.33) |
Уравнение (2.33) выражает следующую теорему.
Ускорение любой точки М при плоском движении тела равно геометрической сумме ускорений полюса от поступательного движения тела и ускорения данной точки от вращения тела вокруг полюса.
Так как
![]() определяет ускорение точки М от вращения
тела вокруг полюса А, то его можно
представить в виде:
определяет ускорение точки М от вращения
тела вокруг полюса А, то его можно
представить в виде:
|
|
(2.34) |
Касательное
![]() и нормальное
и нормальное![]() ускорения точки М от вращения тела
вокруг полюса определяются на основе
(2.26), (2.27):
ускорения точки М от вращения тела
вокруг полюса определяются на основе
(2.26), (2.27):
![]()
![]() ,
при этом
,
при этом
![]() ,
,![]() .
.
Полное ускорение
![]() находится из уравнения
находится из уравнения![]() .
.
Пример 2.11.Определить ускорение точки В тела,
совершающего плоское движение, если
известны ускорение полюса![]() ,
угловая скорость
,
угловая скорость![]() ,
угловое ускорение
,
угловое ускорение![]() и расстояниеAB(рис. 2.31).
и расстояниеAB(рис. 2.31).
В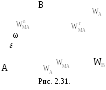 соответствии с изложенным выше находим:
соответствии с изложенным выше находим:
![]()
![]()
![]()
![]()
![]()
Результат представлен на рис. 2.31.
С учетом (2.34) уравнение (2.33) целесообразно записать в виде
|
|
(2.35) |
В общем случае движение полюса может быть криволинейным и тогда полное ускорение произвольной точки М определяется уравнением
|
|
(2.36) |
7.5 Мгновенный центр ускорений
При плоском движении тела всегда имеется точка, жестко связанная с телом, ускорение которой в данный момент времени равно нулю. Такая точка называется мгновенным центром ускорений (МЦУ).
Пусть тело совершает плоское движение, при этом известны ускорение произвольной точки A, а также угловая скоростьи угловое ускорение(рис. 2.32).
Д ля
нахождения МЦУ необходимо:
ля
нахождения МЦУ необходимо:
Найти угол из выражения
 ;
;Отложить от вектора
 полупрямуюABпод угломв сторону направления
углового ускорения;
полупрямуюABпод угломв сторону направления
углового ускорения;Отложить на полупрямой ABотрезок
|
|
(2.37) |
Найденная точка Qи будет МЦУ.
Свойства МЦУ:1) ускорения всех точек тела составляют один и тот же уголс отрезками, соединяющими их с МЦУ; 2) модули ускорений всех точек тела пропорциональны их расстоянию до МЦУ.
Пример 2.12.Определить величину и направление
ускорения точкиCшатунаABкривошипно-ползунного
механизма, если кривошип 0Aвращается с постоянной угловой скоростью![]() ;
;![]() ;
;![]() (рис. 2.33).
(рис. 2.33).
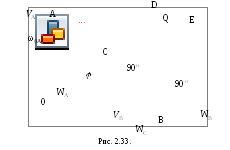
Для решения задачи
найдем МЦУ шатуна AB. Так
как![]() ,
то угловая скорость шатунаABдля указанного положения
,
то угловая скорость шатунаABдля указанного положения![]() .
Тогда
.
Тогда![]() и
и![]() .
.
При
![]() ускорение точкиAнаправлено
к центру вращения кривошипа 0A.
Следовательно МЦУ для шатунаABнаходится на линии
ускорение точкиAнаправлено
к центру вращения кривошипа 0A.
Следовательно МЦУ для шатунаABнаходится на линии![]() .
С другой стороны, ускорение ползунаBнаправлено по линии 0B,
поэтому отрезокBD,
соединяющий точкуBс МЦУ
должен быть перпендикулярен 0B.
Пересечение линийAEиBDопределяет положение точкиQ– МЦУ для шатунаAB. По
свойству МЦУ вектор точки ускорения
точкиC
.
С другой стороны, ускорение ползунаBнаправлено по линии 0B,
поэтому отрезокBD,
соединяющий точкуBс МЦУ
должен быть перпендикулярен 0B.
Пересечение линийAEиBDопределяет положение точкиQ– МЦУ для шатунаAB. По
свойству МЦУ вектор точки ускорения
точкиC![]() ,
а его модуль найдется из пропорции
,
а его модуль найдется из пропорции
![]() .
.