

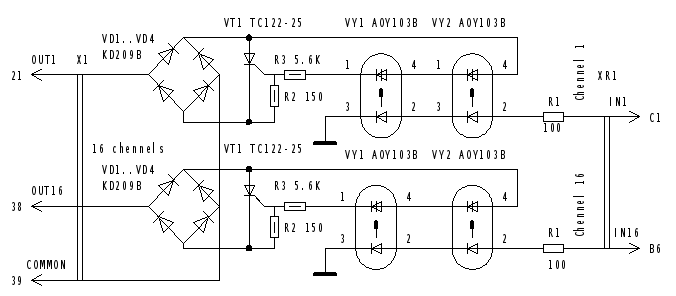
1.8.2. Плата тиристорного управления
Плата тиристорного управления предназначена для бесконтактного управления магнитными пускателями, которые в свою очередь подключают к электрической сети конденсаторы. Используемые в схеме оптронные тиристоры обеспечивают гальваническую развязку платы контроллера от цепей питания катушек пускателей. Мощные тиристоры в оконечном каскаде платы могут работать на любые пускатели с напряжением ~220 или ~380 В. Принципиальная электрическая схема и схема расположения элементов платы тиристорного управления представлены на рисунках 1.8.2.1 и 1.8.2.2.
Рисунок
1.8.2.1. Принципиальная электрическая
схема платы тиристорного управления.
Рисунок
1.8.2.2. Схема расположения элементов на
плате тиристорного управления.

1.8.3. Блок питания
Рассмотрены два варианта блока питания для контроллера компенсатора.
Первый вариант традиционный. Блок питания устройства управления вырабатывает необходимое для работы устройства напряжение +5V. Блок питания трансформаторный. Выпрямитель +5V выполнен на диодах по мостовой схеме. Стабилизатор напряжения 5V выполнен на микросхемном стабилизаторе К142ЕН5А с внешним регулирующим транзистором. Канал +5V обеспечивает ток 2А без перегрева элементов. Принципиальная электрическая схема данного блока питания представлена на рисунке 1.8.3.1.

В
Рисунок
1.8.3.1. Принципиальная электрическая
схема блока питания.
1.8.4. Подключение контроллера – компенсатора
Схема межплатных соединений и подключение контроллера – компенсатора к электрической сети предприятия приведены на рисунках 1.8.4.1. и 1.8.4.2.
Рисунок 1.4.4.1. Схема
межплатных соединений контроллера –
компенсатора.
Рисунок 14.4.2. Схема
подключения контроллера-компенсатора
к электрической сети.
1.9. Алгоритмы контроля и управления
1.9.1. Измерение тока, напряжения и угла
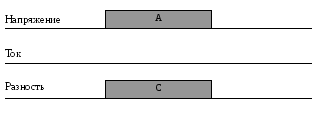
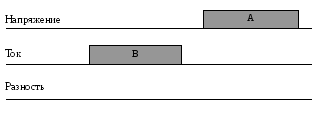
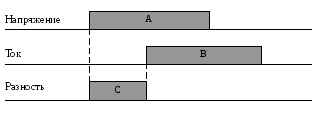
В настоящем описании принято обозначение длины импульса напряжения через А и длины импульса тока через В. Разность во времени между приходом импульсов тока и напряжения обозначена через С.
При угле = 0 синусоида линейного напряжения UAB опережает амплитуду тока IA на угол 30 (рисунок 1.9.1.1.)
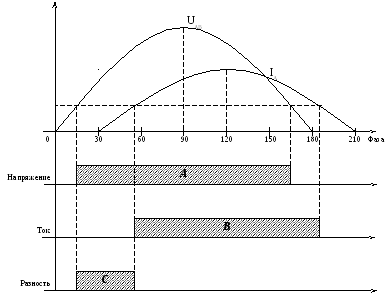
И
Рисунок
1.9.1.1. Диаграмма тока и напряжения в
электрической сети при угле
= 0.
Проанализируем ситуации:
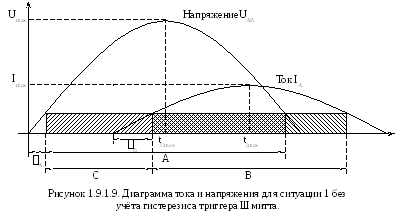
Ситуация 1: вполне реальная; при индуктивной нагрузке и незначительном токе (рисунок 1.9.1.2.)
Рисунок
1.9.1.2. Диаграмма сигналов А, В и С на
выходе измерительной схемы в ситуации
1.
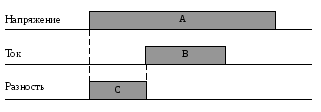
Ситуация 2: предполагает значительную индуктивную нагрузку > 60, чего в промышленных сетях не бывает (рисунок 1.9.1.3.)
Рисунок
1.9.1.3. Диаграмма сигналов А, В и С на
выходе измерительной схемы в ситуации
2.
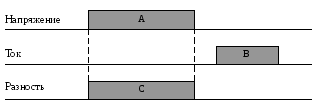
Ситуация 3: предполагает значительную емкостную нагрузку > 30 в емкостном квадранте, чего не бывает (рисунок 1.9.1.4.)
С Рисунок
1.9.1.4. Диаграмма сигналов А, В и С на
выходе измерительной схемы в ситуации
3.

Рисунок
1.9.1.5. Диаграмма сигналов А, В и С на
выходе измерительной схемы в ситуации
4.
С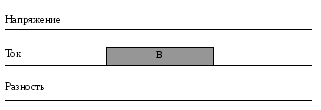 итуация
5: ток есть, а напряжение отсутствует.
Это ошибка измерения или неисправность
(рисунок 1.9.1.6.)
итуация
5: ток есть, а напряжение отсутствует.
Это ошибка измерения или неисправность
(рисунок 1.9.1.6.)
Рисунок
1.9.1.6. Диаграмма сигналов А, В и С на
выходе измерительной схемы в ситуации
5.
Ситуация 6: ещё худший вариант ситуации 3 – невозможен (рисунок 1.9.1.7.)
Рисунок
1.9.1.7. Диаграмма сигналов А, В и С на
выходе измерительной схемы в ситуации
6.
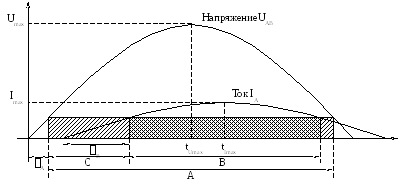
Рисунок
1.9.1.8. Диаграмма сигналов А, В и С на
выходе измерительной схемы в ситуации
7.
Ситуация 7: вполне реальная ситуация, возможна при большом токе (рисунок 1.9.1.8.)
Таким образом контроллер должен обрабатывать ситуации 1, 4, 7.
Ситуация 4 не требует вычисления угла для регулирования, да и он в общем - то невозможен. Ток настолько мал, что регулировать ничего не надо.
Посмотрим как можно вычислить угол в ситуации 1 и 7.
Определим формулу, по которой контроллер будет вычислять угол .
Чтобы определить формулу для расчёта угла введём систему координат и за начало отсчёта примем начало положительной полуволны UAB.
 Если
не учитывать гистерезис триггера Шмитта,
то для ситуации 1 (рисунок 1.9.1.9.)
Если
не учитывать гистерезис триггера Шмитта,
то для ситуации 1 (рисунок 1.9.1.9.)

где tu max – время пикового значения UAB ;
tI max – время пикового значения IAB ;
30 – смещение между контролируемыми линейным напряжением и
фазовым током.
С учётом того, что в относительной системе
координат
учётом того, что в относительной системе
координат

Где: А – время нарастания синусоиды напряжения от нуля до порога выключения (или то же самое – время снижения синусоиды напряжения от порога выключения до нуля);
В – время нарастания синусоиды тока от нуля до порога выключения (или то же самое – время снижения синусоиды тока от порога выключения до нуля);
П олучаем:
олучаем:
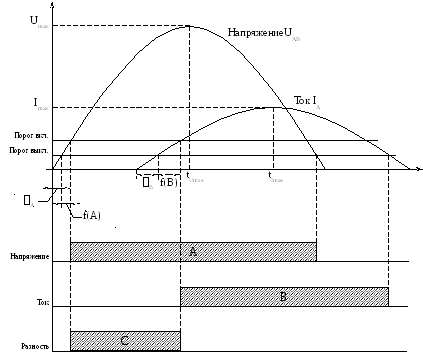
Для ситуации 7 (рисунок 1.9.1.10.) :
Рисунок
1.9.1.10. Диаграмма тока и напряжения для
ситуации 7 без учёта гистерезиса триггера
Шмитта.
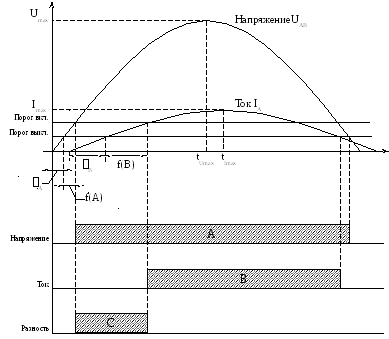
Рассмотрим влияние гистерезиса триггера Шмитта (порог отпускания 0.9 В) в ситуации 1 (рисунок 1.9.1.11.)
Г
Рисунок
1.9.1.11. Диаграмма тока и напряжения для
ситуации 1 с учётом гистерезиса триггера
Шмитта.
В – время нарастания синусоиды тока от нуля до порога выключения;
f(A) – время гистерезиса по синусоиде напряжения, зависит от величины напряжения (длительности сигнала А);
f(B) – время гистерезиса по синусоиде тока, зависит от величины тока (длительности сигнала В).
Е сли
учитывать влияние гистерезиса триггера
Шмитта, то в рассмотренной нами формуле
(3) значенияtUmax
и tImax
будут
высчитываться по формулам:
сли
учитывать влияние гистерезиса триггера
Шмитта, то в рассмотренной нами формуле
(3) значенияtUmax
и tImax
будут
высчитываться по формулам:

И![]() з
рисунка видно, что:
з
рисунка видно, что:
![]()
Отсюда получаем:

Для ситуации 7 (рисунок 1.9.1.12.) получаем аналогичные выражения.
Рисунок
1.9.1.12. Диаграмма тока и напряжения для
ситуации 7 с учётом гистерезиса триггера
Шмитта.
Путём моделирования была выявлена зависимость f(A), учитывающая влияние гистерезиса при вычислении угла . Эта табличная функция была введена в ПО контроллера. Ниже она представлена в таблице 1.9.1.1.
Таблица 1.9.1.1.
Таблица
для определения смещения измеряемых
импульсов тока и напряжения по их
длительности, вызванного гистерезисом
триггера Шмитта
|
П/п |
Величина сигнала А или В, в дискретах |
Значение функции |
|
1 |
2 |
3 |
|
1 |
700 |
135 |
|
2 |
710 |
131 |
|
3 |
720 |
127 |
|
4 |
730 |
120 |
|
5 |
740 |
116 |
|
6 |
750 |
112 |
|
7 |
760 |
109 |
|
8 |
770 |
105 |
|
9 |
780 |
100 |
|
10 |
790 |
95 |
|
11 |
800 |
90 |
|
12 |
810 |
85 |
|
13 |
820 |
80 |
|
14 |
830 |
78 |
|
15 |
840 |
75 |
|
16 |
850 |
73 |
|
17 |
860 |
70 |
|
18 |
870 |
66 |
|
19 |
880 |
62 |
|
20 |
890 |
59 |
|
21 |
900 |
55 |
|
22 |
910 |
52 |
|
23 |
920 |
50 |
|
24 |
930 |
47 |
|
25 |
940 |
45 |
|
26 |
950 |
43 |
|
27 |
960 |
40 |
|
28 |
970 |
39 |
|
29 |
980 |
37 |
|
30 |
990 |
35 |
Продолжение табл. 1.9.1.1.
|
1 |
2 |
3 |
|
31 |
1000 |
34 |
|
32 |
1010 |
32 |
|
33 |
1020 |
30 |
|
34 |
1030 |
28 |
|
35 |
1040 |
27 |
|
36 |
1050 |
26 |
|
37 |
1060 |
25 |
|
38 |
1070 |
24 |
|
39 |
1080 |
22 |
|
40 |
1090 |
21 |
|
41 |
1100 |
20 |
|
42 |
1110 |
19 |
|
43 |
1120 |
18 |
|
44 |
1130 |
17 |
|
45 |
1140 |
16 |
|
46 |
1150 |
15 |
|
47 |
1160 |
14 |
|
48 |
1170 |
13 |
|
49 |
1180 |
12 |
|
50 |
1190 |
11 |
|
51 |
1200 |
10 |
|
52 |
1210 |
9 |
|
53 |
1220 |
8 |
|
54 |
1230 |
7 |
|
55 |
1240 |
6 |
|
56 |
1250 |
5 |
|
57 |
1260 |
5 |
|
58 |
1270 |
5 |
|
59 |
1280 |
5 |
|
60 |
1290 |
5 |
|
61 |
1300 |
5 |
Таким образом по трем импульсам А,В,С можно определить величины тока, напряжения и угол между ними.
Вычисление величины напряжения по длительности сигнала A.
В ходные
цепи контроллера – настраиваются так
чтобы действующему значению напряжения
380 В (амплитудное значениеUmax
=
2 U)
соответствует код 1287.
ходные
цепи контроллера – настраиваются так
чтобы действующему значению напряжения
380 В (амплитудное значениеUmax
=
2 U)
соответствует код 1287.
После чего напряжение сети можно вычислить, используя табличную функцию, полученную в результате моделирования (таблица 1.9.1.2.)
Таблица 1.9.1.2.
Таблица для вычисления напряжения сети по измеренному коду.
|
П/п |
Действующее значение напряжения, В |
Амплитудное значение напряжения, В |
Измеренный код |
|
1 |
350 |
495 |
1252 |
|
2 |
355 |
502 |
1258 |
|
3 |
360 |
509 |
1264 |
|
4 |
365 |
516 |
1270 |
|
5 |
370 |
523 |
1276 |
|
6 |
375 |
530 |
1282 |
|
7 |
380 |
537 |
1287 |
|
8 |
385 |
544 |
1293 |
|
9 |
390 |
552 |
1299 |
|
10 |
395 |
559 |
1305 |
|
11 |
400 |
566 |
1311 |
|
12 |
405 |
573 |
1317 |
|
13 |
410 |
580 |
1322 |