

7. Динамические режимы работы частотно-регулируемого электропривода
Динамический (переходный) режим работы электропривода имеет место при пуске, торможении, реверсе двигателя, а также при относительно быстром изменении нагрузки на валу. Динамические режимы характеризуются появлением динамического момента
![]() ,
,
изменением угловой скорости, токов, потокосцеплений и э.д.с. двигателя. Электромеханический переходный процесс можно представить как совокупность механического и электромагнитного переходных процессов, вызываемых механической инерцией движущихся масс и электромагнитной инерцией обмоток двигателя.
Электромагнитные
процессы протекают значительно быстрее
механических, поэтому в ряде случаев
ими можно пренебречь. Тогда для анализа
механических режимов можно использовать
статические характеристики, дополненные
уравнением движения [3,4]. Рисунок 7.1
иллюстрирует применение графического
метода для расчета переходного процесса
пуска вхолостую асинхронного двигателя.
Для каждого приращения скорости
![]() из уравнения движения определяется
время, за которое происходит данное
приращение:
из уравнения движения определяется
время, за которое происходит данное
приращение:
![]() ,
,
где
![]() -средний
динамический момент на участках
-средний
динамический момент на участках![]() .
.
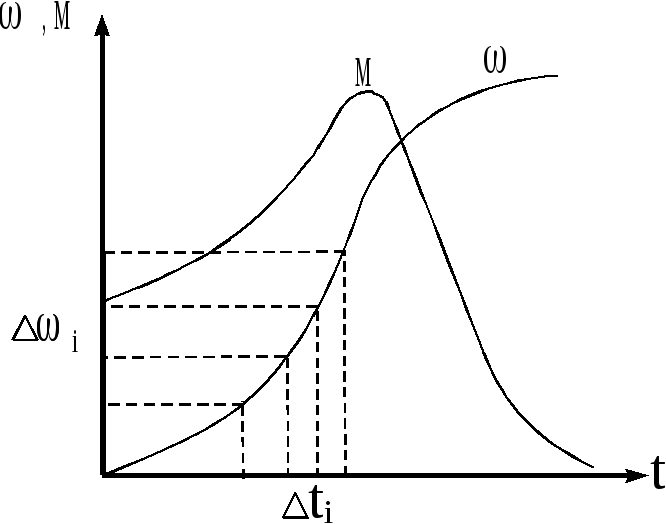
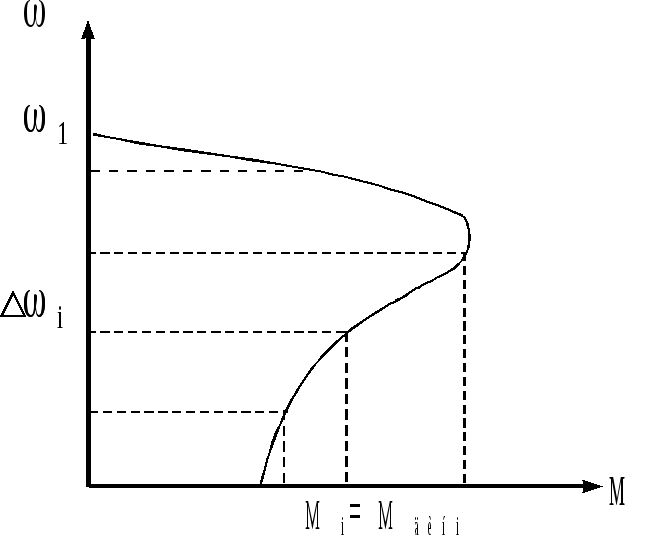
a) б)
Рис. 7.1. К расчету переходного процесса пуска АД без учета электромагнитных процессов
По
известным значениям
![]() и
и![]() строится зависимость
строится зависимость![]() .
Зависимость
.
Зависимость![]() при известной характеристике
при известной характеристике![]() определяется с помощью статической
механической характеристики.
определяется с помощью статической
механической характеристики.
Рассмотренный
подход к анализу динамических режимов
позволяет решить ряд важнейших задач:
найти максимальный момент, определить
время переходного процесса, оценить
потери в двигателе. Однако, если к
динамике электропривода предъявляются
повышенные требования и необходимо в
соответствии с определенными критериями
(быстродействие, точность, минимум
потерь и т.д.) формировать
переходные процессы, то при анализе
процессов в электроприводе и построении
системы управления необходимо учитывать
электромагнитные процессы в АД. На рис.
7.2 приведены зависимости
![]() ,
,![]() и динамическая характеристика пуска
АД вхолостую, построенные с учетом
электромагнитных процессов в АД [4].
и динамическая характеристика пуска
АД вхолостую, построенные с учетом
электромагнитных процессов в АД [4].
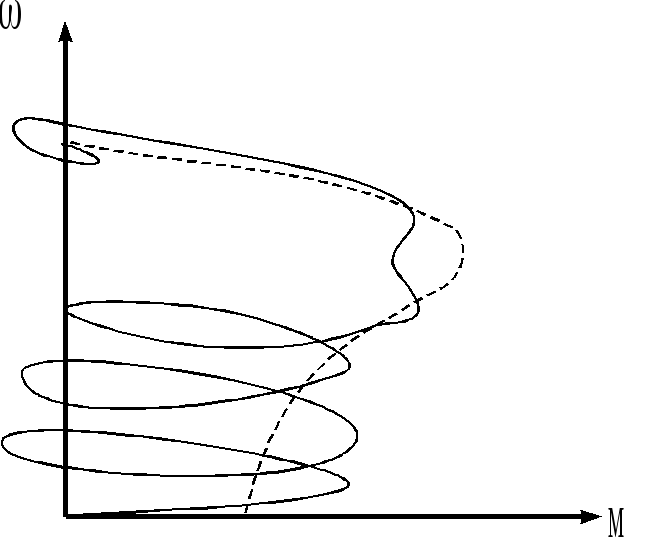
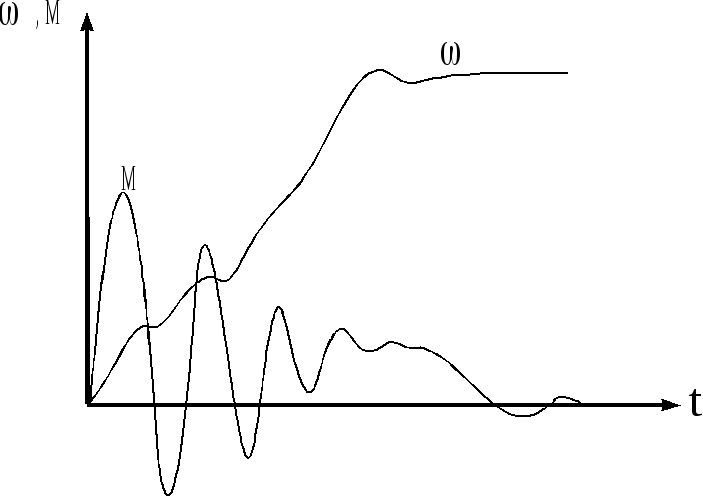
а) б)
Рис. 7.2. Динамические характеристики пуска АД вхолостую с учетом электромагнитных процессов
Сравнение рис. 7.1. и 7.2. показывает, что основной особенностью, характеризующей влияние электромагнитной инерции на динамику АД является наличие значительных по величине пиков переходного электромагнитного момента. Переходный момент образуется в результате суммирования установившегося значения с переходной составляющей, обусловленной взаимодействием принужденной составляющей магнитного потока и свободной составляющей тока ротора [6]. В целом, влияние электромагнитной инерции двигателя на характер изменения момента возрастaет с увеличением скорости изменения магнитного потока. Поэтому для получения оптимальных динамических характеристик стремятся стабилизировать поток двигателя или уменьшить скорость его изменения. Эффективным средством решения этой задачи является, например, применение частотного пуска (торможения, реверса) АД или предварительное намагничивание АД пред пуском для создания начального магнитного потока.
В системах частотно-регулируемого электропривода обеспечивающих высокое качество переходных процессов в широком диапазоне изменения частот вращения (момента) двигателя используeтся управление с ориентированием потока (векторное управление). Математическая модель АД, используемая при реализации векторного управления, учитывает влияние электромагнитных процессов на динамику двигателя.