

4. Основные характеристики ад при работе с номинальной частотой и напряжением
4.1. Принцип действия ад
На
статоре АД размещена симметричная
трехфазная обмотка, у которой оси фаз
смещены в пространстве на
![]() .
Обмотка статора подключена к трехфазной
симметричной системе напряжений, по
обмоткам фаз протекают синусоидальные
токи, сдвинутые во времени на треть
периода. В результате образуется
вращающееся магнитное поле, частота
которого
.
Обмотка статора подключена к трехфазной
симметричной системе напряжений, по
обмоткам фаз протекают синусоидальные
токи, сдвинутые во времени на треть
периода. В результате образуется
вращающееся магнитное поле, частота
которого
(4.1)![]()
Трехфазная короткозамкнутая обмотка ротора выполнена в виде «беличьей клетки ». Вращающееся магнитное поле пересекает витки обмотки ротора и индуцирует в них э.д.с., под действием которой в обмотках фаз ротора протекают токи. На проводники с током в магнитном поле действуют электромагнитные силы. Совокупность этих сил создает электромагнитный момент, увлекающий ротор за вращающимся магнитным полем.
При
равенстве электромагнитного момента
и момента на валу, частота вращения
ротора равна
![]() .
Относительная разность частот вращения
магнитного поля и ротора называется
скольжением:
.
Относительная разность частот вращения
магнитного поля и ротора называется
скольжением:
(4.2)![]() .
.
Наличие
скольжения - основная особенность
асинхронной машины. В двигательном
режиме
![]() ,
при
,
при![]() имеет место генераторный режим работы
параллельно с сетью, при
имеет место генераторный режим работы
параллельно с сетью, при![]() - генераторный режим торможения
противовключением. Скольжение
- генераторный режим торможения
противовключением. Скольжение![]() соответствует режиму идеального
холостого хода, а
соответствует режиму идеального
холостого хода, а![]() - режиму короткого замыкания.
- режиму короткого замыкания.
Обмотка
ротора пересекается магнитным потоком
с частотой
![]() ,
поэтому частота индуцируемой в ней
э.д.с.
,
поэтому частота индуцируемой в ней
э.д.с.
(4.3)![]()
4.2. Режим холостого хода ад
В
режиме идеального холостого хода
![]() ,
,![]() и ротор не оказывает влияние на процессы
в двигателе. Если в первом приближении
пренебречь потерями и потоком рассеяния,
то фазу статора можно представить в
виде идеальной катушки (рис 4.1 а,б)
и ротор не оказывает влияние на процессы
в двигателе. Если в первом приближении
пренебречь потерями и потоком рассеяния,
то фазу статора можно представить в
виде идеальной катушки (рис 4.1 а,б)
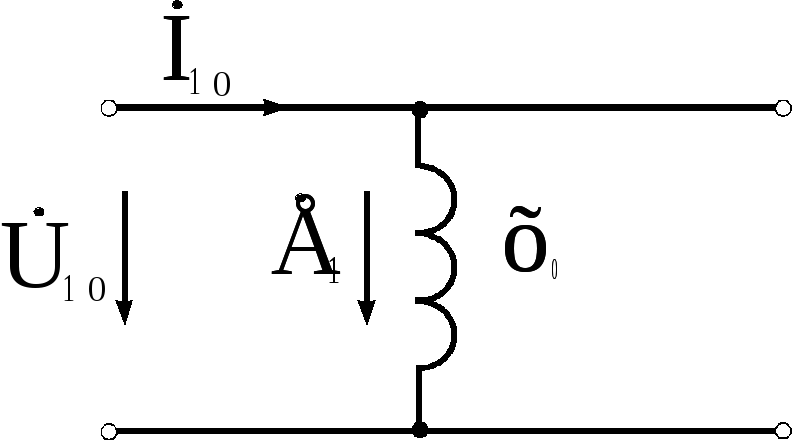
а) б) в)
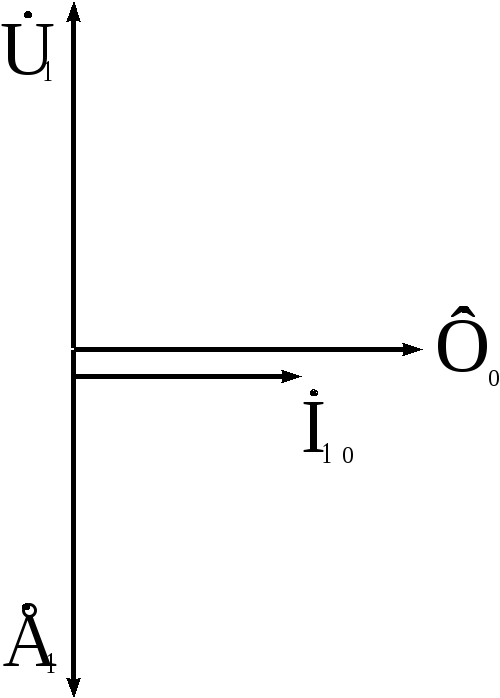
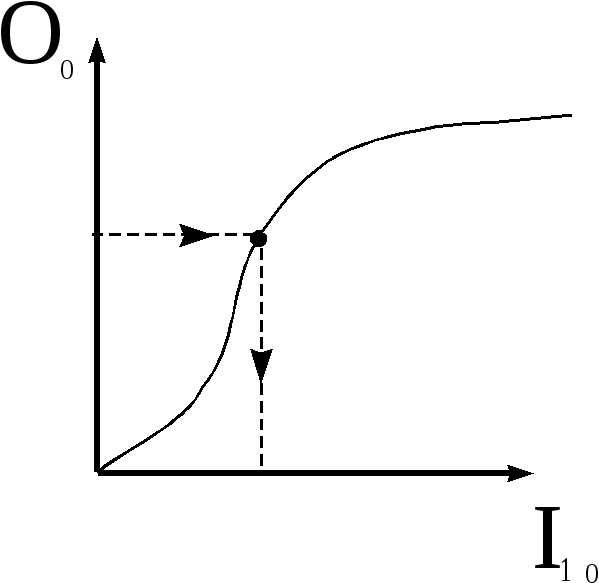
рис 4.1. Схема замещения (a), векторная диаграмма (б), вебер – амперная характеристика (в) АД в режиме холостого хода
Н
(4.4)
![]() ,
,
где
![]() - обмоточный коэффициент;
- обмоточный коэффициент;
![]() -
число витков обмотки статора;
-
число витков обмотки статора;
![]() -
основной магнитный поток.
-
основной магнитный поток.
Отсюда следует, что магнитный поток определяется величиной и частотой напряжения:
(4.5)![]()
Ток двигателя в данном режиме является намагничивающим и определяется только потоком и магнитными свойствами магнитопровода, т.е. вебер- амперной характеристикой (рис. 4.1 в).
Эти два положения, касающиеся определения потока и тока намагничивания, являются основой для анализа процессов в реальных АД.
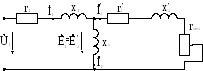
4.3. Процессы в ад под нагрузкой
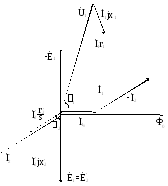
Для анализа установившегося режима АД используют схему замещения и векторную диаграмму (рис 4.2 а, б).
а)
б)
Рис 4.2. Схема замещения (а) и векторная диаграмма (б)
асинхронного двигателя
На
схеме замещения сопротивление
![]() ,
определяет величину нагрузки на валу.
Сопротивления
,
определяет величину нагрузки на валу.
Сопротивления![]() и
и![]() учитывают электрические потери и потоки
рассеяния
учитывают электрические потери и потоки
рассеяния![]() в обмотках статора и ротора. Сопротивление
в обмотках статора и ротора. Сопротивление![]() учитывает действие основного магнитного
потока
учитывает действие основного магнитного
потока![]() ,
пересекающего обмотки статора и ротора.
Основной поток наводит в обмотках
статора и ротора приведенного АД э.д.с.
,
пересекающего обмотки статора и ротора.
Основной поток наводит в обмотках
статора и ротора приведенного АД э.д.с.![]() .
.
Полные потоки статора и ротора:
![]() ,
,
![]() .
.
Каждый из этих потоков индуцирует соответствующую э.д.с.
Э
(4.6)
![]() ,
,
где
![]() - активная составляющая тока ротора
- активная составляющая тока ротора
Из схемы замещения
 ,
,
из векторной диаграммы
 .
.
Таким образом, выражение момента через скольжение имеет вид
(4.7)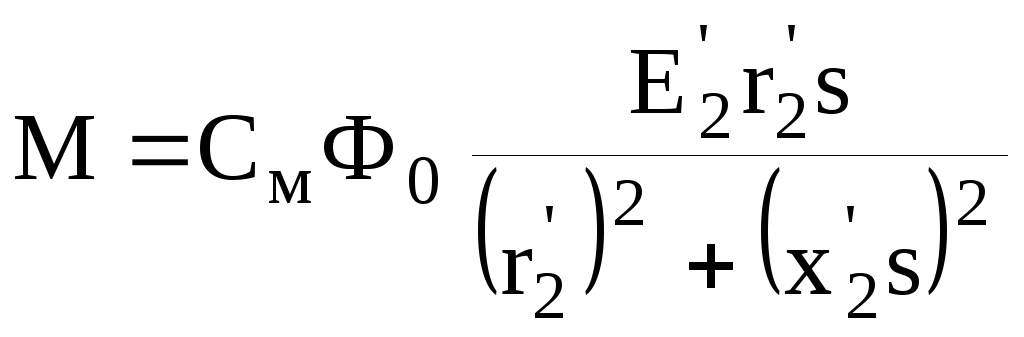
Зависимость
![]() приведена на рис. 4.3,а. Учитывая, что
приведена на рис. 4.3,а. Учитывая, что![]() можно путем пересчета перейти от
характеристики
можно путем пересчета перейти от
характеристики![]() к механической характеристике АД (рис.
4.3б).
к механической характеристике АД (рис.
4.3б).
Отличительной
особенностью АД является наличие
максимального момента при некотором
критическом значении скольжения
![]() .
При увеличении нагрузки до
.
При увеличении нагрузки до![]() двигатель теряет устойчивость и
останавливается. Физически это объясняется
тем, что с ростом скольжения цепь ротора
приобретает все более индуктивный
характер, увеличивается угол
двигатель теряет устойчивость и
останавливается. Физически это объясняется
тем, что с ростом скольжения цепь ротора
приобретает все более индуктивный
характер, увеличивается угол![]() ,
соответственно уменьшается активная
составляющая тока ротора.
,
соответственно уменьшается активная
составляющая тока ротора.
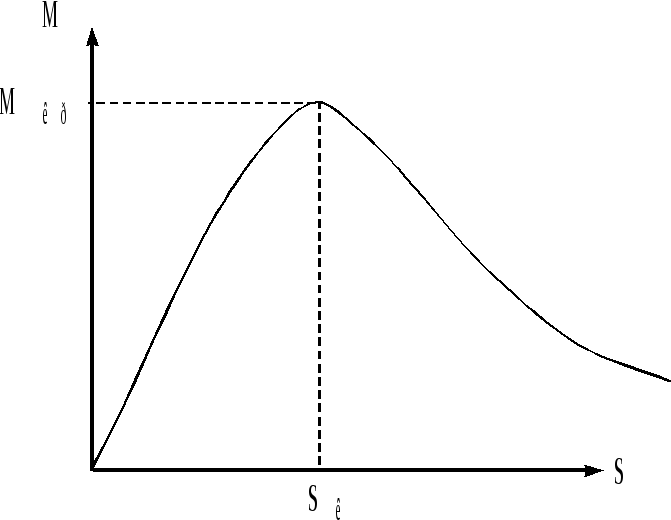
а) б)
Рис 4.3. Зависимость момента от скольжения (а) и механическая характеристика АД (б)
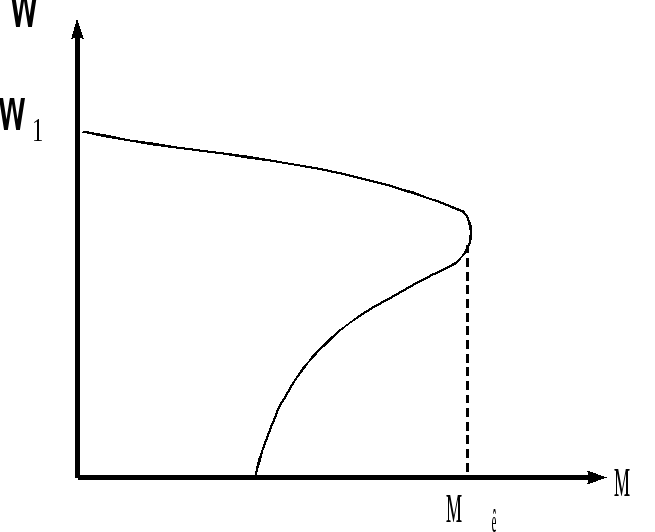
Кроме
того, с ростом нагрузки уменьшается и
поток двигателя. Из векторной диаграммы
видно, что чем больше ток
![]() ,
тем больше падения напряжений на
сопротивлениях статора, тем меньше при
заданном
,
тем больше падения напряжений на
сопротивлениях статора, тем меньше при
заданном![]() ,
э.д.с.
,
э.д.с.![]() ,
связанная с основным потоком.
,
связанная с основным потоком.
Учитывая что
![]() ,
,
откуда
![]() ,
,
получим другое выражение для момента:
(4.8)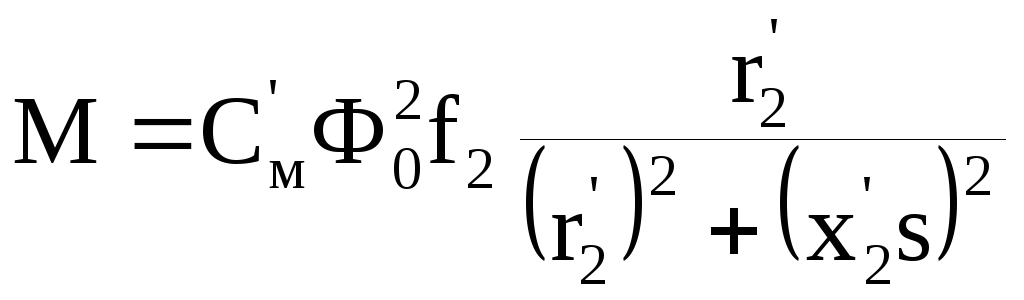
Е
(4.9)![]() (на линейном участке механической
характеристики), то можно принять, что
(на линейном участке механической
характеристики), то можно принять, что![]() ,
тогда
,
тогда
![]() ,
,
т.е. при малых скольжениях момент определяется магнитным потоком и частотой тока ротора.