

Принципиальная схема включения двигателя параллельного возбуждения представлена на рис. 220. Для пуска используется пусковой реостат (п. Р.). Свойства двигателя определяются его характеристиками.
1.Скоростная
характеристика, зависимость
![]() ,
,![]() ,
,![]()
![]()
Скоростная
характеристика при
![]() называется естественной, рис. 221. Если
называется естественной, рис. 221. Если![]() ,
то характеристика называется реостатной.
Так как сопротивление якоря
,
то характеристика называется реостатной.
Так как сопротивление якоря![]() ,
как правило мало, то с увеличением тока
якоря падение напряжения в якорной цепи
мало и скорость уменьшается незначительно.
Поэтому, естественная характеристика
двигателя получается жесткой.
,
как правило мало, то с увеличением тока
якоря падение напряжения в якорной цепи
мало и скорость уменьшается незначительно.
Поэтому, естественная характеристика
двигателя получается жесткой.
2.Моментная
характеристика, зависимость
![]() ,
,![]() .
На рис. 221. Представлена моментная
характеристика, где
.
На рис. 221. Представлена моментная
характеристика, где![]()
3 .Механическая
характеристика, зависимость скорости
.Механическая
характеристика, зависимость скорости![]() от момента,
от момента,![]() .
.
![]()
 ,
определим ток якоря
,
определим ток якоря
![]() через момент,
через момент,![]() ,
откуда
,
откуда![]() ,
это выражение подставим в исходное
уравнение, получим механическую
характеристику:
,
это выражение подставим в исходное
уравнение, получим механическую
характеристику:![]() ,
,![]() .
.
М
Рис.
222![]() представлены на рис. 222, где
представлены на рис. 222, где![]() ,
т. е. механическая характеристика при
,
т. е. механическая характеристика при![]() также жесткая. Это определяет область
использования этих двигателей
(трансмиссии, вентиляторы, системы ГД
для привода станков).
также жесткая. Это определяет область
использования этих двигателей
(трансмиссии, вентиляторы, системы ГД
для привода станков).
У словия
устойчивой работы агрегата, рис. 223.
Основное уравнение движения электропривода
словия
устойчивой работы агрегата, рис. 223.
Основное уравнение движения электропривода
![]() .
.
У
Рис.
223![]() ,
,![]() ,
,![]() ,
,
Е сли
сли![]() ,
,![]() ,
,![]() .
.
Если
![]() ,
,![]() ,
,![]() .
.
условием устойчивой
работы агрегата является:
![]() ,
точка
,
точка![]() будет соответствовать устойчивой работе
агрегата, рис. 69
будет соответствовать устойчивой работе
агрегата, рис. 69
4
224![]() ,
рис. 69.
,
рис. 69.
Р
рис.45![]() ,
тока
,
тока![]() ,
кпд, скорости и момента от мощности на
валу.
,
кпд, скорости и момента от мощности на
валу.
4-6-4-2. Двигатели последовательного возбуждения
О бмотка
возбуждения двигателя включена
последовательно с якорем, рис. 225. Ток
якоря равен току возбуждения. Поэтому
обмотка возбуждения имеет большое
сечение и малое число витков.
Последовательное соединение обмотки
возбуждения является отличительной
особенностью этого двигателя и влияет
на вид характеристик. С
увеличением
тока
якоря,
увеличивается поток, скорость двигателя
резко падает, т. е. получается мягкая
скоростная характеристика, рис. 226.
бмотка
возбуждения двигателя включена
последовательно с якорем, рис. 225. Ток
якоря равен току возбуждения. Поэтому
обмотка возбуждения имеет большое
сечение и малое число витков.
Последовательное соединение обмотки
возбуждения является отличительной
особенностью этого двигателя и влияет
на вид характеристик. С
увеличением
тока
якоря,
увеличивается поток, скорость двигателя
резко падает, т. е. получается мягкая
скоростная характеристика, рис. 226.
1 .Скоростная
характеристика
.Скоростная
характеристика![]() ,
,![]() .
В общем виде, за счет насыщения, не имеет
решения. Аналитическое выражение
скоростной характеристики можно получить
только для ненасыщенной машины, когда
.
В общем виде, за счет насыщения, не имеет
решения. Аналитическое выражение
скоростной характеристики можно получить
только для ненасыщенной машины, когда![]() ,
рис. 226.
,
рис. 226.
М омент
омент![]() ,
при
,
при![]() ,
,![]() ,
т. е. если ток нагрузки возрастает в 2
раза, то момент в 4 раза. Это условие и
определяет область применения этих
двигателей, т. е. используются там, где
при пуске нужен большой пусковой момент
(тяговый привод). Скоростная характеристика
при
,
т. е. если ток нагрузки возрастает в 2
раза, то момент в 4 раза. Это условие и
определяет область применения этих
двигателей, т. е. используются там, где
при пуске нужен большой пусковой момент
(тяговый привод). Скоростная характеристика
при![]() ,
запишется:
,
запишется:![]() .
.
2. Моментная
характеристика,
![]() ,
,![]() ,
при
,
при![]() ,
,![]() ,
рис. 226.
,
рис. 226.
3. Механическая
характеристика,
![]() .
Аналитическое выражение характеристики
может быть записано при условии
.
Аналитическое выражение характеристики
может быть записано при условии![]() .
.
![]()
 ,
,
![]() ,
,![]() ,
если подставить ток
,
если подставить ток![]() в исходное уравнение, получим:
в исходное уравнение, получим:![]() ,
,![]() ,
где
,
где![]() .
.
Общий вид механических характеристик представлен на рис. 27.
Двигатель
последовательного возбуждения пойдет
на разнос при работе его в холостую. Это
может привести к механическим поломкам
двигателя. Поэтому, минимальный ток
двигателя должен быть не менее
![]() .
.
4-6-3-3. Двигатель смешанного возбуждения
П ринципиальная
схема включения двигателя представлена
на рис. 228. В зависимости от того, какая
из обмоток преобладает по потоку,
двигатели подразделяются на две
разновидности:
ринципиальная
схема включения двигателя представлена
на рис. 228. В зависимости от того, какая
из обмоток преобладает по потоку,
двигатели подразделяются на две
разновидности:
1)Двигатель
параллельного возбуждения с добавочной,
последовательной обмоткой. Характеристики
такого двигателя приближаются к двигателю
параллельного возбуждения, рис. 75.
Характеристика (1), естественная.
Характеристика (2) соответствует
встречному включению потоков
![]() ,
при согласном включении,
,
при согласном включении,![]() получаем характеристику (3).
получаем характеристику (3).
2)Двигатель последовательного возбуждения с добавочной параллельной обмоткой. Характеристики такого двигателя приближаются к характеристикам двигателя последовательного возбуждения. Характеристика 4 - характеристика двигателя последовательного возбуждения, характеристика 5 - характеристика двигателя смешанного возбуждения, при этом, обмотки включаются только согласно. Такая характеристика имеет скорость идеального холостого хода и двигатель не пойдет в разнос при холостом ходе. У такого двигателя частота вращения и момент зависят от двух потоков.
![]()
 ,
,
![]() .
.
При согласном включении обмоток, при том же токе якоря, можно получить повышенный момент. Такой двигатель используется для тяговых установок и там, где имеются резкие изменения нагрузки.
4-6-4. Регулирование частоты вращения двигателей постоянного тока
С точки зрения
регулирования частоты вращения, двигатель
постоянного тока является универсальным.
Можно регулировать скорость за счет
изменения сопротивления в цепи якоря,
потока и подводимого напряжения. Это
видно из формулы:
![]() .
.
4-6-5. Регулирование частоты вращения сопротивлением в цепи якоря.
У равнения
токов до и после введения сопротивления
равнения
токов до и после введения сопротивления
![]() ,
,
![]() ,
откуда
,
откуда![]() ,
т. е. ток
,
т. е. ток![]() и момент уменьшается (
и момент уменьшается (![]() )
.
)
.
При этом
![]() и
скорость
и
скорость![]() уменьшается. С уменьшением скорости
уменьшается. С уменьшением скорости![]() ток якоря возрастает, и он достигнет
исходного тока якоря, но при меньшей
скорости
ток якоря возрастает, и он достигнет
исходного тока якоря, но при меньшей
скорости![]() .
.
Переходный процесс показан на рис. 230.
Р егулирование
частоты вращения сопротивлением в цепи
якоря осуществляется в сторону уменьшения
скорости, рис. 231.
егулирование
частоты вращения сопротивлением в цепи
якоря осуществляется в сторону уменьшения
скорости, рис. 231.
Но так как ток
якоря протекает по Rр,
то увеличиваются общие потери, и снижается
кпд. При постоянном токе, за счет
увеличения падения напряжения
![]() ,
скорость двигателя уменьшается.
,
скорость двигателя уменьшается.
4-6-5-2. Регулирование частоты вращения за счет изменения потока
Т ок
якоря до и после изменения потока
ок
якоря до и после изменения потока![]() ,
,![]() ,
их отношение
,
их отношение![]() .
Уравнение моментов
.
Уравнение моментов![]() .
Уменьшим поток на
.
Уменьшим поток на![]() ,
т. е.
,
т. е.![]() ,
,![]() .
Напряжение примем за единицу, тогда
.
Напряжение примем за единицу, тогда![]() .
.
Ток якоря возрос
в 3,3 раза, тогда
![]() ,
то
,
то![]() и
и![]() (возрастает).
Переходный процесс представлен на рис.
232.
(возрастает).
Переходный процесс представлен на рис.
232.
С увеличением
скорости вращения, ток якоря будет
уменьшаться, но он будет больше исходного![]() ,
т. к. уменьшен поток.
,
т. к. уменьшен поток.
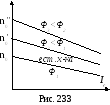
При уменьшении потока частота вращения возрастает, рис 233.
Как правило, регулирование частоты вращения изменением потока производят в сторону увеличения. В сторону уменьшения регулирования малоэффективно из-за насыщения магнитной цепи.
4-6-5-3. Регулирование частоты вращения изменением подводимого напряжения.
Регулирование частоты вращения изменением подводимого напряжения производится следующими способами:
А) Система генератор-двигатель (Г-Д).
Б) Тиристорный преобразователь-двигатель (ТП-Д).
В) Широтно-импульсное регулирование.
А) Система Г-Д, рис.234.
![]()

Увеличивая ток возбуждения генератора iвг, возрастает поток Фги Ег, а следовательно увеличивается напряжение на якоре двигателя и скорость возрастает. Регулирование происходит плавно при малых потерях энергии, рис. 234.
Эта система используется при большой мощности двигателя (подъёмники, прокатные станы, экскаваторы и т.д).
Б) Тиристорный преобразователь-двигатель.
В системе Г-Д используется большое число машин, что увеличивает стоимость установки и снижает надежность.
П оэтому
в последнее время для регулируемого
напряжения все чаще используются
статические преобразователи, рис.235.
оэтому
в последнее время для регулируемого
напряжения все чаще используются
статические преобразователи, рис.235.![]()
Увеличивая угол
управления
![]() - площадь полупериода уменьшается,
уменьшается среднее значение напряжения
-Uср, а следовательно
уменьшается скорость вращения.
- площадь полупериода уменьшается,
уменьшается среднее значение напряжения
-Uср, а следовательно
уменьшается скорость вращения.
В) Широтно-импульсное регулирование.
И
 ельность
подключения двигателя ключом (К) к сети,
изменяется среднее значение напряжения,
рис. 236. В качестве ключа используются
схемы на базе тиристоров или транзисторов.
ельность
подключения двигателя ключом (К) к сети,
изменяется среднее значение напряжения,
рис. 236. В качестве ключа используются
схемы на базе тиристоров или транзисторов.
Изменяя
время импульса tи
изменяется скважность
![]() ,
,
где tи - время импульса;
tп - время паузы.
С
Рис.
236
![]() .
.
Как видим, изменяя среднее значение напряжения, можно регулировать частоту вращения двигателя. Эта система широко используется вместо контактарно-резисторных систем.
4 -7.
Коммутация в машинах постоянного тока.
-7.
Коммутация в машинах постоянного тока.
При вращении якоря щетка попеременно замыкает секции якоря и в этой секции происходит изменение направления тока. А сама секция передается в другую параллельную ветвь, рис.237. Ток в секции меняется только под щеткой. Дадим определение коммутации:
Коммутацией называется процесс изменения направления тока в секции при переходе ее из одной параллельной ветви в другую.
Рис. 237.
П ia ia Рис.
238
На рис. 238 еще раз показан процесс коммутации. При положении щетки на пластине (1) ток в секции протекает по часовой стрелке, и секция относится к правой параллельной ветви. Затем при вращении якоря секция щеткой будет закорочена. В конце коммутации щетка будет расположена на пластине (2). Ток в секции сменит направление, и она перейдет в левую параллельную ветвь (показано пунктиром).
Процесс коммутации длится всего тысячные доли секунды. Такое быстрое изменение направления тока вызывает многие неприятности, в частности, искрение на коллекторе.
Искрение гостируется в специальной таблице:
Степень искрения: 1 - отсутствие искрения.
1![]() - слабое точечное искрение под небольшой
частью щетки.
- слабое точечное искрение под небольшой
частью щетки.
1![]() - слабое точечное искрение под большей
частью щетки.
- слабое точечное искрение под большей
частью щетки.
2 – искрение под всем краем щетки.
3 – значительное искрение под всем краем щетки с наличием крупных искр.
При
нормальной коммутации степень искрения
не должна превышать 1![]() .
.
Искрение определяется не только неудовлетворительной коммутацией, а также определяется механическими причинами, потенциальными неравномерностями. Механическое искрение определяется некачественной щеткой, при плохой обработке и
т. д.
При изучении коммутации будем исходить из двух положений:
Будем считать, что контактная поверхность щетки проводит ток равномерно.
Удельное сопротивление контакта (переходное сопротивление единицы площади), будем принимать постоянным и не зависимым от плотности тока.
4-7-1. Закон изменения тока в коммутируемой секции
Время, в течение которого происходит смена направления тока в коммутируемой секции, называется периодом коммутации - Тк.
![]() ,
,
где к - число коллекторных пластин,
n - частота вращения якоря,
Вш - ширина щетки,
Вк - коллекторное деление.
За начальный момент коммутации примем момент, когда щетка находится на пластине (1), а конец коммутации, когда щетка находится на пластине (2).На рис.59 представлен момент, когда щетка находится на пластине 1 и 2 и секция коммутирует. Сопротивление секции по сравнению с сопротивлениями r1 и r2 невелико и им можно пренебречь.
2ia ia
ia

Рис. 239.
Определим закон изменения тока i в коммутируемой секции.
По первому закону Кирхгофа:
I1=ia+i,
I2=ia-i.
По второму закону Кирхгофа:
I1r1-i2r2=![]() .
.
Решив эти уравнения относительно тока коммутируемой секции, получим
I=ia![]() +
+![]() ,
,
где
![]() -сумма
в коммутируемой секции (ЭДС самоиндукции,
взаимоиндукции и ЭДС внешнего поля).
-сумма
в коммутируемой секции (ЭДС самоиндукции,
взаимоиндукции и ЭДС внешнего поля).
Как видим, ток в коммутируемой секции состоит из двух слагаемых: первое ток прямолинейной коммутации (основной ток), а второе – добавочный ток. Добавочный ток будет влиять на характер коммутации. Она может быть прямолинейной, замедленной и ускоренной.
4-7-2. Прямолинейная коммутация
Прямолинейная коммутация происходит тогда, когда добавочный ток (rдоб) равен нулю.
Ток в коммутируемой секции равен
i=ia![]() ,
,![]() =
=![]() , (1)
, (1)
где S1 - площадь соприкосновения пропорциональная времени оставшегося до конца коммутации - Тк–t;
S2 - площадь соприкосновения пропорциональная времени от начала коммутации - t.
Разделим уравнение (1) на r2
I=ia![]() =ia
=ia ,
,![]() =
=![]() =
=![]()
Заменим
отношение
![]() на
на![]() .
.
I=ia ,
после преобразования получим закон
изменения тока прямолинейной коммутации
,
после преобразования получим закон
изменения тока прямолинейной коммутации![]() ,
ток в коммутируемой секции. Графически
это будет прямая линия.
,
ток в коммутируемой секции. Графически
это будет прямая линия.
Н а
рис. 240 на момент времени t показаны токи
i1,
i2
и i. Эта коммутация самая хорошая, так
как плотность тока под щеткой равномерно
распределяется под обеими частями
щетки.
а
рис. 240 на момент времени t показаны токи
i1,
i2
и i. Эта коммутация самая хорошая, так
как плотность тока под щеткой равномерно
распределяется под обеими частями
щетки.
Рис. 240.
tg
2![]()
![]() =
=![]()
tg
1=![]()
т.к. 1=2, то tg 1=tg 2, а, следовательно, 1=2 ( плотность тока).
4-7-3. Замедленная коммутация
Так
как период коммутации составляет
тысячные доли секунды, то от скорости
изменения тока в коммутируемой секции
наводится ЭДС самоиндукции
![]() .
Кроме того, в пазу располагается другая
активная сторона другой секции,
которая коммутирует под другим полюсом.
Ток этой секции наведет ЭДС взаимоиндукции
в впервой коммутируемой секции
.
Кроме того, в пазу располагается другая
активная сторона другой секции,
которая коммутирует под другим полюсом.
Ток этой секции наведет ЭДС взаимоиндукции
в впервой коммутируемой секции![]() .
Обе эти ЭДС по природе одинаковы, поэтому
объединим их в одну и назовем реактивной
ЭДС
er.
.
Обе эти ЭДС по природе одинаковы, поэтому
объединим их в одну и назовем реактивной
ЭДС
er.
Кроме
того, в коммутируемой секции от внешнего
поля наведется ЭДС
ek.
(ek
ЭДС от внешнего поля или коммутирующая
ЭДС). ЭДС er
и ek
вызовут в секции добавочный ток
![]() ,
где r1+r2
общее сопротивление под щеткой. Характер
тока будет определяться характером
суммарного значения ЭДС e.
Конечно, e
тоже меняется, но мы будем брать среднее
значение и считать, что e
будет постоянной.
,
где r1+r2
общее сопротивление под щеткой. Характер
тока будет определяться характером
суммарного значения ЭДС e.
Конечно, e
тоже меняется, но мы будем брать среднее
значение и считать, что e
будет постоянной.
Посмотрим, как будет изменяться добавочный ток iдоб и сопротивление r1+r2 за период коммутации. Исходя из соотношения
![]()
 , откуда
, откуда
![]() .
Аналогично,
.
Аналогично,![]() ,
откуда
,
откуда![]() .
Так как sщTk,
а s2t,
s1Tkt,
то r1+r2=rщ
.
Так как sщTk,
а s2t,
s1Tkt,
то r1+r2=rщ![]() .
.
При t=0, r1+r2=, iдоб =0
t=Tk, r1+r2=, iдоб=0
t=Tk/2, r1+r2=4rщ, iдоб 0.
Н а
рис.61 представлено изменение суммы
сопротивлений r1+r2
добавочному току. Видим, что при t=Tk/2
добавочный ток имеет наибольшее значение.
а
рис.61 представлено изменение суммы
сопротивлений r1+r2
добавочному току. Видим, что при t=Tk/2
добавочный ток имеет наибольшее значение.
Рис. 241.
Результирующий
ток в коммутируемой секции состоит из
тока прямолинейной коммутации (пунктирная
прямая) и добавочного тока. Так как при
замедленной коммутации преобладает
реактивная ЭДС, то процесс коммутации
замедляется, т.е. ток в секции изменяет
направление позже, чем при прямолинейной
коммутации
![]() .
При замедленной коммутации erek
и добавочный ток iдоб
увеличивает
ток i1
и уменьшает ток i2,
рис.242.
.
При замедленной коммутации erek
и добавочный ток iдоб
увеличивает
ток i1
и уменьшает ток i2,
рис.242.
i1 i2


 Рис.
242.
Рис.
242.
Поэтому равномерное распределение тока под щеткой будет нарушено. Плотность тока на сбегающей части щетки возрастает, и искрение будет наблюдаться на этой части щетки. Замедленная коммутация – это наихудший вид коммутации.
4-7-4. Ускоренная коммутация
Т ок
ок![]() ,
при ускоренной коммутации eker,
т.е. ЭДС от внешнего поля больше реактивной
ЭДС и добавочный ток изменит свое
направление, что приведет к изменению
тока в коммутируемой секции раньше, чем
через t =Tk/2,
рис.243 (коммутация криволинейная).
,
при ускоренной коммутации eker,
т.е. ЭДС от внешнего поля больше реактивной
ЭДС и добавочный ток изменит свое
направление, что приведет к изменению
тока в коммутируемой секции раньше, чем
через t =Tk/2,
рис.243 (коммутация криволинейная).
Рис. 243.
При ускоренной коммутации ток в секции i2 возрастает, а i1 уменьшится. Ток в секции i уменьшится.
Плотность тока на набегающей части щетки возрастает, и искрение будет наблюдаться на этой части щетки, рис.244. Равномерное распределение тока под щеткой также будет нарушено. Этот вид коммутации также неблагоприятный. Иногда специально настраивают коммутацию на ускоренную.


Р
 ис.
244.
ис.
244.
При ускоренной коммутации искрение более вероятное на набегающей части щетки. При наладке коммутации стремятся приблизить криволинейную коммутацию к прямолинейной.
4-7-5. Определение реактивной ЭДСer
![]() - это выражение
для самоиндукции, но мы примем это
выражение для реактивной ЭДС, учитывая
разность в коэффициенте L. Это запись
мгновенной ЭДС.
- это выражение
для самоиндукции, но мы примем это
выражение для реактивной ЭДС, учитывая
разность в коэффициенте L. Это запись
мгновенной ЭДС.
Среднее
значение ЭДС
![]() ,
где Lcкоэффициент
самоиндукции, определение его связано
с рядом сложностей. Напомним, что
индуктивность секции определяется ее
потокосцеплением, т.е. произведением
потока на число сцепленных с ним витков,
когда по секции протекает ток в 1 ампер.
,
где Lcкоэффициент
самоиндукции, определение его связано
с рядом сложностей. Напомним, что
индуктивность секции определяется ее
потокосцеплением, т.е. произведением
потока на число сцепленных с ним витков,
когда по секции протекает ток в 1 ампер.
В основу определения Ls
положено понятие об удельной магнитной
проводимости,
под которой понимают число потокосцеплений
на единицу длины секции, состоящей из
одного витка, по которой протекает ток
в один ампер.
основу определения Ls
положено понятие об удельной магнитной
проводимости,
под которой понимают число потокосцеплений
на единицу длины секции, состоящей из
одного витка, по которой протекает ток
в один ампер.
![]() ,
,![]() ,
где Wcчисло
витков секции, тогда
,
где Wcчисло
витков секции, тогда
![]() ,
поток секции
,
поток секции![]() .
.
Рис. 245.
Определим проводимость секции. На длине l может быть проводимость пазовая и зубцовая. И еще есть лобовая проводимость.
Проводимость секции
![]() ,
рис. 245
,
рис. 245
![]() , где
, где
![]() удельная
приведенная магнитная проводимость.
удельная
приведенная магнитная проводимость.
Это было бы справедливо, если бы в пазу лежала только одна секция, но в пазу лежит еще другая активная сторона другой секции, т.е. здесь будет взаимоиндукция. Надо учесть влияние взаимоиндукции.
![]()

эта часть удваивается, тогда
![]() .
.
Перейдем к определению реактивной ЭДС
![]()
![]() где Wc
число витков секции, период коммутации
где Wc
число витков секции, период коммутации
![]() ,
, ,
домножим на
,
домножим на![]() ,
тогда
,
тогда ,
где
,
где![]()
линейная скорость на окружности якоря,
величина
линейная скорость на окружности якоря,
величина
 ,
окончательно реактивная ЭДС
,
окончательно реактивная ЭДС
![]() ,
где A
линейная нагрузка.
,
где A
линейная нагрузка.
![]() гн/м.
гн/м.
ЭДС от внешнего поля ek
![]() ,
где Bk,
lk
индукция Bk
в зоне коммутации и длина lk
также в зоне коммутации.
,
где Bk,
lk
индукция Bk
в зоне коммутации и длина lk
также в зоне коммутации.
4-7-6. Способы улучшения коммутации
Идея улучшения коммутации сводится к тому, чтобы криволинейную коммутацию, привести к прямолинейной, а для этого необходимо, чтобы добавочный ток iдоб был равен нулю.
![]() .
Уменьшить ток iдоб
можно, попытавшись увеличить сопротивление
r1+r2,
теоретически это возможно, но через эти
сопротивления проходит и основной ток
машины, что увеличит потери напряжения
и нагрев пластин. Значит этим путем идти
нельзя. Кроме того, марку щеток выбирают
в зависимости от плотности тока и
скорости вращения коллектора. Обычно
для машин постоянного тока используют
графитные или электрографитные
щетки. Поэтому сопротивления r1+r2
определяются
выбранной маркой щеток.
.
Уменьшить ток iдоб
можно, попытавшись увеличить сопротивление
r1+r2,
теоретически это возможно, но через эти
сопротивления проходит и основной ток
машины, что увеличит потери напряжения
и нагрев пластин. Значит этим путем идти
нельзя. Кроме того, марку щеток выбирают
в зависимости от плотности тока и
скорости вращения коллектора. Обычно
для машин постоянного тока используют
графитные или электрографитные
щетки. Поэтому сопротивления r1+r2
определяются
выбранной маркой щеток.
Уменьшить добавочный ток iдоб можем за счет уменьшения реактивной ЭДСer.
![]() .
Уменьшая любую величину, мы уменьшаем
er,
но больших результатов не получим, к
примеру, если уменьшим линейную нагрузку
A, то это приведет к увеличению габаритов.
Уменьшение скорости вращения приведет
к такому же результату.
.
Уменьшая любую величину, мы уменьшаем
er,
но больших результатов не получим, к
примеру, если уменьшим линейную нагрузку
A, то это приведет к увеличению габаритов.
Уменьшение скорости вращения приведет
к такому же результату.
Можно уменьшить
число витков в секции
Wc,
но опять таки сильно уменьшить Wc
нельзя, так как от Wс
зависит наводимая ЭДС якоря. Остается
последнее – уменьшить
![]() .
.
![]() .
.
Д ля
уменьшения
ля
уменьшения![]() используют обмотки с укороченным шагом,
либо используют ступенчатую обмотку,
рис.246, рис. 247.
используют обмотки с укороченным шагом,
либо используют ступенчатую обмотку,
рис.246, рис. 247.
 Рис.
246. Рис. 247.
Рис.
246. Рис. 247.
За счет укорочения шага, рис. 246, активные стороны секций расположены в разных пазах, это приводит к тому, что ЭДС взаимной индукции в них не будет. Частично этот же результат получен при ступенчатой обмотке, рис. 247 Но и здесь большого эффекта достичь нельзя.
Наиболее рациональным средством в приближении коммутации к прямолинейной, т.е. при iдоб=0, является достижение равенства er=ek, т. е. необходимо получить ek=er, которые скомпенсируют друг друга и сведут добавочный ток iдоб=0.
При этом улучшение коммутации производят двумя методами:
За счет сдвига щеток с нейтрали,
За счет установки добавочных полюсов.
Улучшение коммутации за счет сдвига щеток с нейтрали, рис. 248, рис. 249, рис. 250.

Рис. 248 Рис. 249 Рис. 250
Если щетки установлены на геометрической нейтрали, то секция, подойдя к пластине (1), начнет коммутировать. От скорости изменения т ока в секции в ней наведется реактивная ЭДС. Кроме того, секция коммутирует во внешнем поле той же полярности. Поэтому в секции наведется ЭДС ek того же знака, что и ЭДС er. Если щетки сдвинуть на физическую нейтраль, то секция начнет коммутировать, подойдя к пластине (2), и в ней наведется ЭДС er, а ЭДС ek будет равна нулю, т.к. индукция B в точке 2 равна нулю. Затем, если сдвинуть щетки за физическую нейтраль, то секция начнет коммутировать, дойдя до пластины (3), и в ней появится ЭДС er, а индукция B в этом положении будет иметь противоположный характер, и наводимая ЭДС ek будет противоположна ЭДС er. Сдвинув щетки на соответствующий угол, можно получить полную компенсацию er и ek и тем самым свести ток iдоб =0 и привести коммутацию к прямолинейной. Этот способ улучшения коммутации применим только тогда, когда нагрузка генератора практически постоянная. В практике нагрузка, как правило, переменная. Поэтому для улучшения коммутации используют второй способ.
2. Улучшение коммутации за счет установки добавочных полюсов, рис. 251.
Дополнительные полюса устанавливают на геометрической нейтрали. Количество их равно числу главных полюсов. Это простое и целесообразное решение. Все современные машины постоянного тока снабжены дополнительными полюсами.

Рис. 251.
Идея улучшения коммутации сводится к следующему:
Секция
идет от южного полюса. Дойдя до щетки
на нейтрали, секция начнет коммутировать
и в ней наведется от скорости изменение
тока ЭДС
![]() .
Дополнительный полюс своим потоком
наведет в коммутируемой секции ЭДСek.
Для того, чтобы ЭДС ek
была встречно с ЭДС er,
необходимо, чтобы секция коммутировала
в зоне противоположной полярности, т.е.
полярность дополнительного полюса
должна быть северной (N).
.
Дополнительный полюс своим потоком
наведет в коммутируемой секции ЭДСek.
Для того, чтобы ЭДС ek
была встречно с ЭДС er,
необходимо, чтобы секция коммутировала
в зоне противоположной полярности, т.е.
полярность дополнительного полюса
должна быть северной (N).
Обмотка дополнительного полюса включается последовательно с якорем. Это делается для того, чтобы с увеличением тока якоря одновременно изменялись ЭДС er и ek.

Для того, чтобы BkIa, необходимо, чтобы дополнительные полюса должны быть ненасыщенные и набираться из пакета листов электротехнической стали.
Определение числа витков дополнительного полюса
Число витков дополнительного полюса выбирается исходя из равенства ЭДС er=ek.
 обычно llk,
тогда Bk=
обычно llk,
тогда Bk=![]() .
Исходя из индукции Bk,
ведется расчет числа витков дополнительного
полюса.
.
Исходя из индукции Bk,
ведется расчет числа витков дополнительного
полюса.
Намагничивающая сила дополнительных полюсов складывается из двух частей:
Первая часть должна создать индукцию Bk,
Вторая часть должна компенсировать реакцию якоря, обычно эта часть больше.
Fq=Faq+Fg=AЕ+2![]() ,
,
где g – зазор под дополнительным полюсом,
Kg – коэффициент зазора.
Намагничивающая сила дополнительных полюсов
Fg=2IaWg,
откуда Wg=![]() .
.
Задавшись током Ia определяем линейную нагрузку А, а по А определяем Вk и Fg.
На практике для наладки коммутации снимают кривые безискровой коммутации и по ним производят коррекцию числа витков Wg или изменяют зазор g для того, чтобы коммутация была прямолинейна.
4-7-7. Круговой огонь в машинах постоянного тока
Круговой огонь в машинах постоянного тока возникает при пиковых нагрузках или при коротком замыкании.
Это тяжелый и не приятный случай коммутации, приводящий к порче машины, т.е. коллекторные пластины перекрываются огнем по всему коллектору и они плавятся, т.е. машина выходит из строя.
Физическая природа этого явления отличается чрезвычайной сложностью. Развитию кругового огня способствуют две причины:
Первая причина.
П редположим,
что имеем пик нагрузки, резко увеличивается
ток в якоре, также резко возрастает
линейная нагрузка А и столь же быстрое
возрастание ЭДС еr,
а ЭДС ek
в это время не успевает расти, так как
при большом токе дополнительный полюс
насыщен и ЭДС ek
будет мало изменяться, т.е. er>>ek,
отсюда коммутация становится явно
замедленная. Появится искрение на
сбегающем крае щетки. Искры объединяются
в дугу. При вращении якоря дуги сливаются
и получается круговой огонь.
редположим,
что имеем пик нагрузки, резко увеличивается
ток в якоре, также резко возрастает
линейная нагрузка А и столь же быстрое
возрастание ЭДС еr,
а ЭДС ek
в это время не успевает расти, так как
при большом токе дополнительный полюс
насыщен и ЭДС ek
будет мало изменяться, т.е. er>>ek,
отсюда коммутация становится явно
замедленная. Появится искрение на
сбегающем крае щетки. Искры объединяются
в дугу. При вращении якоря дуги сливаются
и получается круговой огонь.
Вторая причина.
Рис. 252.
В момент перегрузки реакция якоря сильно искажает индукцию. И секция, дойдя до максимального значения индукции, в ней наведется увеличенная ЭДС. Напряжение между коллекторными пластинами резко возрастает, кроме того, изоляция между пластинами загрязнена угольной пылью. Эти причины приведут к перекрытию этих пластин. Далее подойдя в эту зону максимальной индукции, следующая секция окажется в таком же положении, и следующие коллекторные пластины перекроются (произойдет пробой изоляции). Это будет также способствовать развитию кругового огня, рис.252.
В

 машинах большой мощности для ликвидации
второй причины устанавливают
компенсационную обмотку. Эта обмотка
расположена в пазах полюсных наконечников,
рис.253.
машинах большой мощности для ликвидации
второй причины устанавливают
компенсационную обмотку. Эта обмотка
расположена в пазах полюсных наконечников,
рис.253.
Р ис.
253.
ис.
253.
Эта обмотка соединяется последовательно с якорем. Поток компенсационной обмотки компенсирует поток якоря. Это приводит к тому, что у машины, как при холостом ходе, так и при нагрузке индукция имеет вид трапеции. Не будет повышенных индукций, а следовательно не будет перенапряжений и пробоя изоляции между пластинами.
Наличие компенсационной обмотки облегчает условия работы дополнительных полюсов. Для ослабления кругового огня машину часто настраивают на ускоренную коммутацию, чтобы при пиковых нагрузках она приходила к прямолинейной коммутации. Кроме того, по окружности якоря устанавливают предохранительные щиты для ограничения развития кругового огня.