

Синхронные моменты будут сильно проявляться.
Рис. 121
Синхронные моменты могут быть ослаблены за счет скоса пазов и правильного выбора соотношений зубцов статора и ротора.
3. Вибрационные силы и моменты
Зубцовые и другие магнитные поля статора и ротора, образующие синхронные моменты, проявляющиеся не только при взаимном синхронном их вращении, но и при любых других скоростях вращения. В этом случае они образуют периодически меняющиеся вращающиеся моменты, которые в течение одного полупериода направлены в сторону вращения ротора, а в течении другого полупериода в обратном направлении. Такие периодически меняющиеся моменты могут создавать вибрации ротора и статора, которые становятся особенно заметными при наличии резонансных явлений. При неблагоприятных соотношениях зубцов статора и ротора могут возникнуть не только тангенциальные, но так же и радиальные магнитные силы притяжения, действующие на статор и ротор и перемещающиеся вдоль окружности воздушного зазора при вращении ротора, эти силы вызывают вибрацию машины.
Анализ этих процессов показывает, что вибрационные силы и моменты проявляются особенно сильно, если
![]()
![]()
3-4-5. Круговая диаграмма асинхронной машины
Р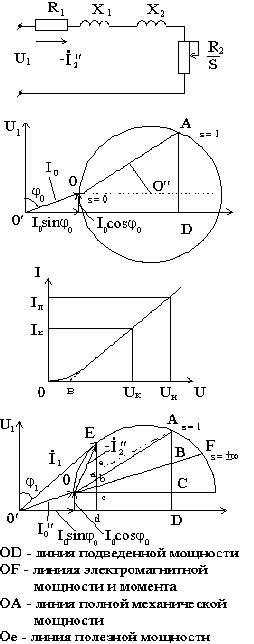 абочие
и другие характеристики асинхронного
двигателя, определяющие рабочие свойства
машины, могут быть получены:
абочие
и другие характеристики асинхронного
двигателя, определяющие рабочие свойства
машины, могут быть получены:
Путем непосредственной нагрузки.
Р
Рис. 122
асчетным путем (определение параметров и расчет характеристик).Косвенным методом (по данным опыта холостого хода и короткого замыкания). Используя данные опыта холостого хода и короткого замыкания можно построить упрощенную круговую диаграмму, а из нее получить данные для построения рабочих характеристик.
И
Рис.
123
![]() ,
,
![]()
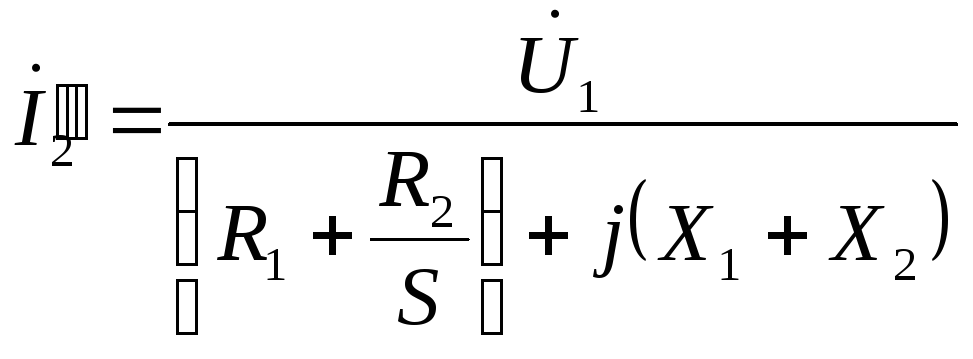
Обозначим в рабочей ветви, рис 122
Рис.
124![]()
![]() ,
,![]() ,
,![]()
тогда
ток -
Г
Рис.
125![]() является окружность, рис. 125.
является окружность, рис. 125.
Построение круга диаграммы.
Из опыта холостого хода для UНнаходим
Р0 иI0,I0=
![]() ,
,
![]() ,
,![]()
и определяем
![]() ,
,![]()
а по ним строится вектор тока хх – I0, задавшись масштабом токаmI(A/см)
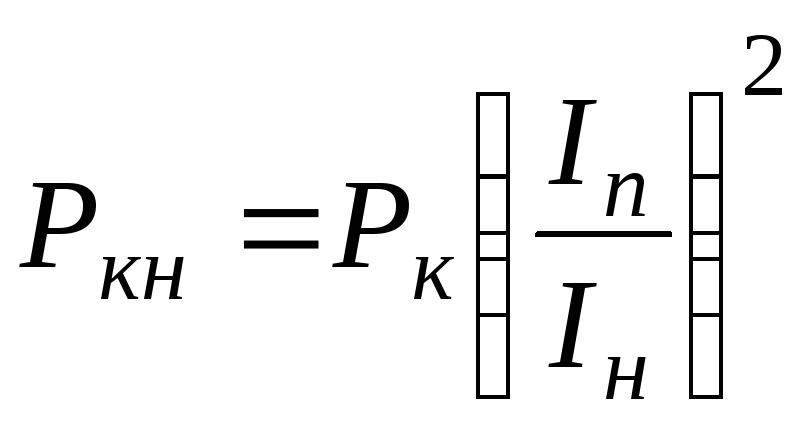
Для построения точки А, где S= 1 приводим токIк, мощность РкиCosкк номинальному напряжениюIпUн. Из рис. 125.
![]() ,
откуда
,
откуда
![]()
 ,
,
![]() ,
,![]()
Откладываем отрезок
![]() ,
,![]() получаем точку А. Соединив точку А с О
получим хорду окружности. Опуская
перпендикуляр из середины хорды до
линии
получаем точку А. Соединив точку А с О
получим хорду окружности. Опуская
перпендикуляр из середины хорды до
линии![]() получим центр окружности
получим центр окружности![]() .
.
Построение линии OF. Определение точки В.
![]() ,
,
![]() ,r1- известно
,r1- известно
откуда отрезок
![]() .
.
Получим точку В.
Соединив точку О с В и продлив до
окружности получим точку F где S=. Мощность![]() ,
т.е.
,
т.е.
![]() ,
,
![]()
Задавшись mI, определим масштаб мощности
![]()
Тогда мощность
![]() ,
,
![]() ,
,![]()
Рис.
126 Рис.
127 Рис.
128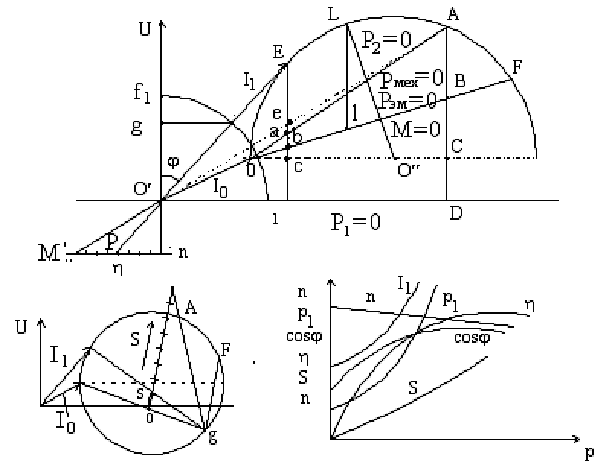
Как получить данные из круговой диаграммы для построения рабочих характеристик?
P1, I1, , Cos1, S, n = f(P2)
Задавшись током i1
I1= (0,25; 0,5; 0,75; 1,0; 1,25)Iн
Табл. 1
|
I1 = |
0,25 |
0,5 |
0,75 |
1,0 |
1,25 |
|
|
|
|
|
p1 |
|
|
|
|
|
|
p2 |
|
|
|
|
|
|
cos 1 |
|
|
|
|
|
|
S |
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
Для каждого значения
тока I1 определяемp1,p2, cos1,
S,n,и сводим в таблицу 1.![]()
S =
![]() ,
,
![]()
По данным таблицы строятся рабочие характеристики. Скольжение определяется по рис.127. Общий вид рабочих характеристик представлен на рис.128.
3-4-6. Пуск трехфазных асинхронных двигателей
Основные величины,
которые определяют режим пуска, являются
пусковой ток Iпи
пусковой момент Мп. При пуске
возникают большие токи, которые снижают
напряжение в сети, а у асинхронных
двигателей![]() .
В короткозамкнутых асинхронных
двигателях
.
В короткозамкнутых асинхронных
двигателях![]() ,
Мпмал. У двигателей с фазным
ротором
,
Мпмал. У двигателей с фазным
ротором![]() ,
Мп- большой. При тяжелых условиях
пуска применяют двигатель с фазным
ротором.
,
Мп- большой. При тяжелых условиях
пуска применяют двигатель с фазным
ротором.
Способы пуска.
1. Пуск под номинальным напряжением.
2. Пуск при пониженном напряжении:
а) Реакторный
б) Автотрансформаторный
в) Пуск посредством переключения обмотки статора со звезды на треугольник
3. Пуск двигателя с фазным ротором.
3-4-6-1. Пуск под номинальным напряжением (прямой пуск)
Прямой пуск асинхронных двигателей простой и нет необходимости в дополнительной аппаратуре.
Недостатки:
а) большие пусковые
токи, что снижает напряжение в сети, а
![]()
б) большие ударные электромагнитные моменты
в) большие динамические усилия возникают в обмотках статора.
Поэтому асинхронные двигатели большой мощности пускаются при пониженном напряжении.
3-4-6-2. Пуск при пониженном напряжении
а) реакторный способ пуска, рис. 129.
П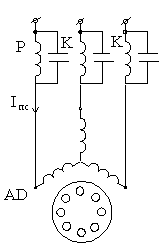 ри
пуске для ограничения пускового тока
в фазы двигателя включается сопротивление
реактора, т.е.
ри
пуске для ограничения пускового тока
в фазы двигателя включается сопротивление
реактора, т.е.
![]() ,
,
часть напряжения падает на реакторе, а на двигатель подается пониженное напряжение. После разгона асинхронного двигателя ток в статоре уменьшится, уменьшится падение напряжения на реакторе. Напряжение на двигателе возрастет. Затем замыкают контакторы К и двигатель подключается на полное напряжение.
Обозначим
![]() - коэффициент
допустимой кратности,
- коэффициент
допустимой кратности,
Рис. 129
![]() ,
,
пусковой момент
![]()
 .
.
![]()
т.е. если уменьшить ток в 2 раза (Кпс), момент уменьшиться в 4 раза. Это является недостатком реакторного способа пуска.
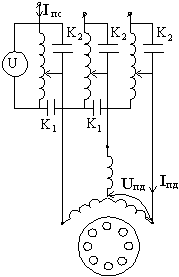
б) автотрансформаторный способ пуска, рис. 130.
![]() ,
,
![]() ,
,
Рис. 130
где КА– коэффициент трансформации автотрансформатора.
![]()
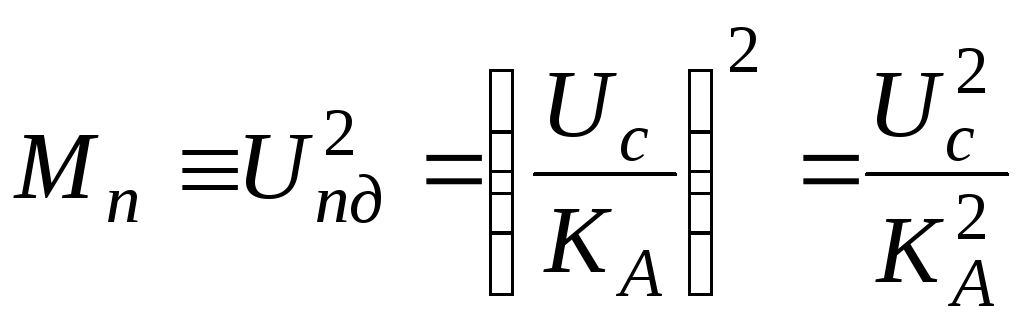
Отсюда мы видим,
что если пусковой ток уменьшается в
![]() раз, то и момент пусковой во столько же
раз, т.е. больше чем при реакторном пуске.
раз, то и момент пусковой во столько же
раз, т.е. больше чем при реакторном пуске.
Порядок пуска: замыкается контактор К1, подается напряжение на автотрансформатор, двигатель при этом пускается при пониженном напряжении. После разгона размыкается контактор К1, и автотрансформатор работает как реактор, затем замыкается контактор К2и на двигатель подается полное напряжение.
в) пуск посредством переключения обмотки статора со звезды на треугольник, рис. 131.
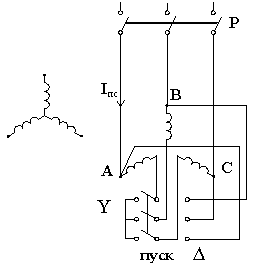
При пуске обмотка
статора соединена в звезду, фазное
напряжение меньше линейного на
![]() ,
поэтому пусковой ток уменьшится. После
разгона двигателя обмотку статора
переключают в треугольник. При соединении
обмотки статора в звезду пусковой ток
и пусковой момент уменьшаются в 3 раза
по сравнению с пуском при соединении
обмотки статора в треугольник.
,
поэтому пусковой ток уменьшится. После
разгона двигателя обмотку статора
переключают в треугольник. При соединении
обмотки статора в звезду пусковой ток
и пусковой момент уменьшаются в 3 раза
по сравнению с пуском при соединении
обмотки статора в треугольник.
![]() ,
,
![]() ,
,![]()
Рис. 131
отнесем
 ,
,
![]() ,
,![]()
необходимо учитывать, что при пуске момент уменьшается в 3 раза.
3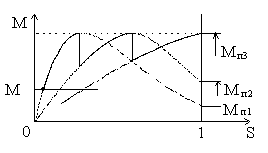 -4-6-3.
Пуск двигателя с фазным ротором
-4-6-3.
Пуск двигателя с фазным ротором
Пуск этого двигателя происходит при полном напряжении. Но за счёт введения активного сопротивления в роторную цепь увеличиваем пусковой момент и уменьшаем пусковой ток, рис. 132.
Пуск производится в несколько ступеней. Это делается для того, чтобы уменьшить время пуска.
Рис. 132
3-5. Асинхронные двигатели с обмоткой ротора специального исполнения
Как было установлено, что одним из способов улучшения пусковых характеристик асинхронного двигателя является повышение активного сопротивления в цепи ротора.
Однако наличие пусковых сопротивлений, переключающих устройств, контактных колен, повышает стоимость, снижает надёжность и усложняет эксплуатацию. Эти недостатки можно избежать, применяя роторы специального исполнения, имеющие К.З. обмотки в виде беличьей клетки, активные и индуктивные сопротивления которых меняются в процессе пуска в ход. по мере разбега с изменением частоты. В роторах подобных конструкций используется эффект вытеснения тока.
Вообще для асинхронных двигателей необходимо отметить такое противоречие:
Е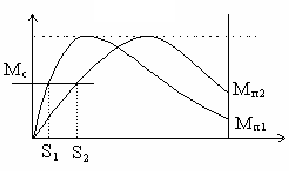 сли
активное сопротивление в роторе большое,
то пусковой момент большой, а ток пусковой
ограничен, т.е. получаются хорошие
пусковые характеристики, а рабочие
характеристики получаются плохими,
т.к. при том же моменте сопротивления
на валу, скольжение возрастёт, а это
приведёт к ухудшению рабочих характеристик.
И наоборот, если активное сопротивление
ротора будет малым, то рабочие
характеристики будут
сли
активное сопротивление в роторе большое,
то пусковой момент большой, а ток пусковой
ограничен, т.е. получаются хорошие
пусковые характеристики, а рабочие
характеристики получаются плохими,
т.к. при том же моменте сопротивления
на валу, скольжение возрастёт, а это
приведёт к ухудшению рабочих характеристик.
И наоборот, если активное сопротивление
ротора будет малым, то рабочие
характеристики будут
Рис. 133
хорошими (скольжение мало), пусковые характеристики плохими ( рис.133).
Асинхронные двигатели с обмоткой ротора специального исполнения решают эти противоречия компромиссно.
3-5-1. Короткозамкнутый асинхронный двигатель с глубоким пазом на роторе
В этой конструкции стержни заложены в пазы ротора, имеют большие радиальные размеры по сравнению с шириной. Конструкции стержней имеют следующий вид (рис.134):
Рис.
134 Рис.
136 Рис.
135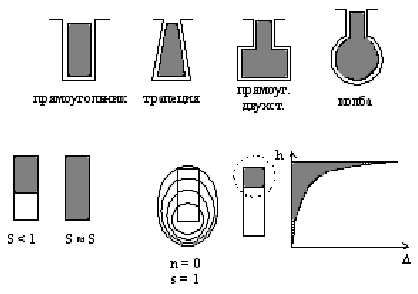
Идея эффекта вытеснения тока в стержне следующая:
При пуске n = 0, скольжение = 1, а частота в роторе f2= f1.
Ток в стержне созданный основной ЭДС будет иметь поля рассеяния, которые будут изменяться с частотой = 50 Гц и наводить в нижней части стержня (проводник находиться в железе) ЭДС, которая создает вихревые токи направленные встречно основному току и будут вытеснять его на периферию (к зазору), (рис.135). Площадь прохождения тока уменьшается, что приводит к увеличению активного сопротивления, а индуктивное сопротивление стержня уменьшится, т.к. магнитная проводимость полям рассеяния уменьшается, и как следствие это приводит к улучшению пусковых характеристик.
По мере разгона ротора частота f2уменьшается, а следовательно и частота пересечения стержня полями рассеяния уменьшится. Уменьшатся вихревые токи и основной ток будет глубже проникать в стержень(рис.136).
При скольжении S = Sнчастота f2 = 2-3 Гц и влиянием потоков рассеяния можно пренебречь и ток в стержне ротора будет проходить по всей площади стержня, что приведет к тому, что активное сопротивление ротора будет малым, а это приведет к тому, что рабочие характеристики будут благоприятными.
Обычно сопротивление r2возрастает в 3-4 раза, а индуктивное сопротивление снижается на 30-40% приS= 1.
При клинообразной форме стержня эффект вытеснения проявляется в большей степени, т.е. r2возрастает сильнее. Вытеснение тока проявляется только в стержне пазовой части. Активные и индуктивные сопротивления роторной цепи запишутся:
![]()
![]()
где
![]() ,
,![]() - сопротивления при S = Sн;Kr- коэффициент увеличения активного
сопротивления при S = 1; Kx- коэффициент
снижения индуктивного сопротивления
при S = 1.
- сопротивления при S = Sн;Kr- коэффициент увеличения активного
сопротивления при S = 1; Kx- коэффициент
снижения индуктивного сопротивления
при S = 1.
![]()
где
![]()
- приведенная высота стержня
h - высота стержня
вст- ширина стержня
вп- ширина паза
f2- частота ЭДС ротора
- удельное сопротивление материала ротора.
Рис.
137 Рис.
138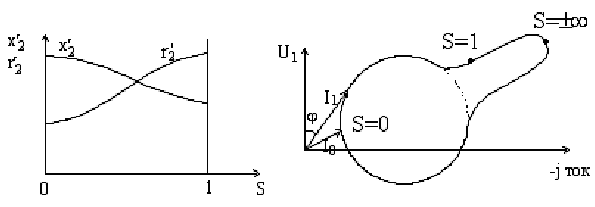
На рис.137 представлено изменение активного и индуктивного сопротивления обмотки ротора при изменении S = 1 0.
Так как параметры
![]() ,
,![]() переменны для различных скольжений, то
геометрическим местом тока I, не будет
окружность, а будет сложная кривая
представленная на рис.138.
переменны для различных скольжений, то
геометрическим местом тока I, не будет
окружность, а будет сложная кривая
представленная на рис.138.
Следует отметить, что за счет большего рассеяния роторной обмотки сos1ни перегрузочная способность будет меньше, чем у двигателей с круглым стержнем на роторе.