

Кратность пускового тока
![]()
Кратность пускового момента
![]()
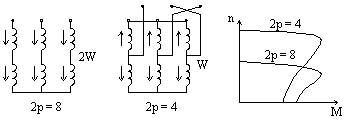
3-5-2. Короткозамкнутый асинхронный двигатель с двойной клеткой на роторе
Принцип работы:
При пуске работает пусковая обмотка,
обладающая большим активным сопротивлением,
что улучшает пусковые характеристики
(![]() ).
При скольжении SSнработает рабочая обмотка,
имеющая малое активное сопротивление,
что обеспечивает хорошие рабочие
характеристики. Расположение стержней
представлено на рис. 139.
).
При скольжении SSнработает рабочая обмотка,
имеющая малое активное сопротивление,
что обеспечивает хорошие рабочие
характеристики. Расположение стержней
представлено на рис. 139.
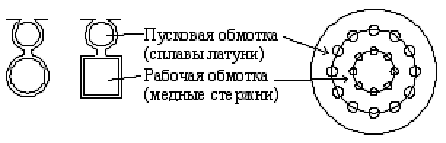
Рис. 139
Идея: При пуске в ход (f2f1) индуктивное сопротивление нижней клетки значительно больше, чем верхней, так как она расположена глубже в пазу, поэтому пусковой ток ротора будет проходить главным образом по верхней клетке, обладающей большим активным сопротивлением, это обеспечивает большой пусковой момент и пониженный пусковой ток. По мере разбега двигателя частота f2уменьшается, и ток постепенно перераспределяется между клетками. При малых скольжениях индуктивное сопротивление обмоток ротора ничтожно малы и токи в клетках распределяются обратно пропорционально их активным сопротивлениям. Поэтому основной ток в роторе проходит преимущественно по рабочей обмотке, имеющей меньшее активное сопротивление. При малом активном сопротивлении роторной обмотки рабочие характеристики получаются хорошими.
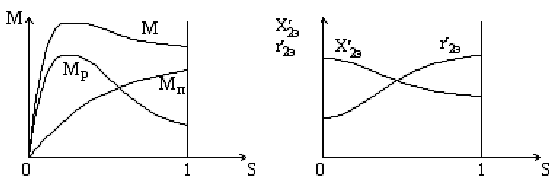
Рис. 140 Рис. 141
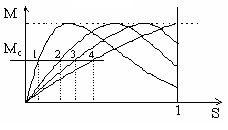
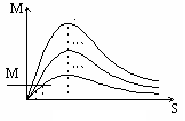
На рис.140 представлено
изменение моментов пусковой и рабочей
обмотки, а также суммарного момента при
S = 10. На рис.141 показано
изменение эквивалентных сопротивлений![]() ,
,![]() роторной цепи при S = 10.
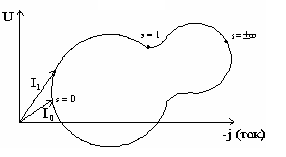
Так как параметры роторной цепи при
изменении скольжения изменяются, то
геометрическим местом конца вектора
тока I не будет окружность, будет
представлять собой сложную кривую.
роторной цепи при S = 10.
Так как параметры роторной цепи при
изменении скольжения изменяются, то
геометрическим местом конца вектора
тока I не будет окружность, будет
представлять собой сложную кривую.
Если параметры схемы замещения выразить через постоянные коэффициенты, то ток статора можно представить следующим выражением:
![]()
На рис.142 показано геометрическое место конца вектора I1.
Конструкция двигателя сложнее, но он обладает большим пусковым моментом, поэтому применяется там, где необходимы повышенные пусковые моменты (транспортеры, дробилки, шаровые машины и т. д.).
Кратность пускового тока:
![]()
Кратность пускового момента
![]()
Рис. 142
C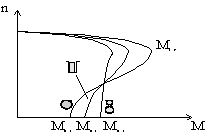 osни перегрузочная способность этого
двигателя ниже, чем у двигателя с одной
клеткой (круглой) на роторе, т.к. магнитное
рассеяние в роторе больше, чем у одной
обмотки.
osни перегрузочная способность этого
двигателя ниже, чем у двигателя с одной
клеткой (круглой) на роторе, т.к. магнитное
рассеяние в роторе больше, чем у одной
обмотки.
Характер изменения момента (механические характеристики) для различных двигателей показан на рис. 143.
Рис. 143
У двигателей с глубоким пазом и с двойной клеткой Мкр уменьшается из-за большого магнитного рассеяния на роторе.
3-6. Регулирование частоты вращения асинхронных двигателей
Для асинхронного двигателя частота вращения ротора определяется по формуле
![]() ,
или
,
или
![]() ,
,
откуда видно, что скорость вращения ротора можно регулировать:
1. f = var - изменять частоту подводимого напряжения.
2. p=var- изменять число пар полюсов.
3. Sr2- изменять скольжение:
а) сопротивлением r2в цепи ротора.
б) введением Eв роторную цепь.
3-6-1. Регулирование частоты вращения двигателя изменением частоты
Д ля
регулирования частоты вращения
асинхронного двигателя необходим
преобразователь частоты. При регулировании
необходимо стремится к тому, чтобы с
изменением частоты не ухудшались рабочие
характеристики. Для чего необходимо,
чтобы с изменением частоты f поток
оставался постоянным
ля
регулирования частоты вращения
асинхронного двигателя необходим
преобразователь частоты. При регулировании
необходимо стремится к тому, чтобы с
изменением частоты не ухудшались рабочие
характеристики. Для чего необходимо,
чтобы с изменением частоты f поток
оставался постоянным
(![]() )
)![]() ,
,
т
Рис.
144
![]()
является экономичным. Для поддержания m,Cos,, как показали исследования можно достичь этого, если выполняется условие
![]() .
.
Регулирование изменением частоты происходит плавно. На рис.144 представлены механические характеристики при различных значениях частоты.
3-6-2. Регулирование частоты вращения двигателя путем изменения числа пар полюсов
Это способ регулирования является ступенчатым. Переключение производится обмоткой статора с одной синхронной скорости на другую. Обычно ротор при этом короткозамкнутый.
Наибольшее распространение получили обмотки с переключением числа полюсов 1:2. Кроме того, имеются обмотки разработанные Харитоновым для станков, которые переключают число полюсов как 1:2, так и отличных от этого соотношения. Кроме того, в промышленности используются обмотки на принципе - Полюсной амплитудной модуляции, разработанной англичанином Райклифом. Мы рассмотрим обмотки только при переключении числа полюсов 1:2.
Обычно регулирование производится на две, три, четыре ступени. На статоре укладывается либо одна обмотка с переключением, либо две с переключением на четыре скорости. Это дает возможность увеличить пределы регулирования, но понижает использование машины, поскольку работает одна обмотка.
Требования к обмотке.
1. Схема обмотки должна иметь минимальное число переключаемых элементов.
2. На всех ступенях насыщение магнитной системы машины не должно превышать допустимых значений.
3. Обмоточные коэффициенты на всех ступенях вращения должны быть достаточно высокими.
4. При включении обмотки не должны возникать значительные отрицательные асинхронные и синхронные вращающие моменты и вибрационные силы, обусловленные высшими гармониками магнитного поля.
5. Для каждой ступени устанавливается определенная мощность по нагреву.
6. Направление вращения ротора должно быть неизменным.
В ыполнить
эти условия сложно и не всегда разрешимо.
ыполнить
эти условия сложно и не всегда разрешимо.
Принцип переключения числа полюсов основан на том, что изменяя ток в одной из полуфаз обмотки изменяется число полюсов. Этот принцип продемон-стрирован на рис. 145.
Рис. 145
Электромагнитная мощность для любого числа Р обмотки статора определяется соотношением
![]() ,
,
![]() ,
,
пользуясь этим соотношением, проанализируем работу нескольких схем, рис. 146.
Y/Y - 8/4

![]()
Работа при Р = const
![]()
Y/YY - 8/4
![]()
![]()
/YY - 8/4

Рис. 146
![]()
Работа при постоянной мощности
Р = const
3-6-3. Регулирование частоты вращения двигателя сопротивлением в цепи ротора (с фазным ротором)
Как известно, если увеличивать r2в цепи ротора, то скольжение, при постоянном моменте сопротивления, возрастает, а скорость уменьшается (рис.147).
Потери в роторной цепи Pэл2=PэмS, т.е. при глубоком регулировании потериPэл2возрастают, а это для двигателей большой мощности не допустимо.
Рис. 147
Поэтому в двигателях большой мощности регулирование частоты вращения производят за счет введения Е в роторную цепь. При любом скольжении ЭДСЕ должна иметь ту же частоту, что и основная ЭДС Е2Sроторной обмотки. Идея регулирования сводится к тому, что еслиЕkнаправлена встречно с Е2S, то скорость уменьшается, а если согласно с Е2S, то скорость увеличивается. Схема введения ЭДСЕ в роторную цепь представлена на рис. 148.

Рис. 148
3-6-4. Регулирование частоты вращения изменением подводимого напряжения
 Этот
способ регулирования не дает больших
результатов. Диапазон регулирования
получается небольшим (см. рис.149).
Этот
способ регулирования не дает больших
результатов. Диапазон регулирования
получается небольшим (см. рис.149).
В практике используются различные импульсные способы регулирования частоты вращения на базе тиристоров.
Рис. 149
3-7. Асинхронная машина в качестве генератора
В качестве самостоятельного генератора асинхронная машина употребляется очень редко.
Этот режим встречается в период торможения двигателей. Но иногда асинхронная машина используется в генераторном режиме. В этом режиме асинхронная машина может работать либо в тормозном режиме, при этом для создания потока используется энергия сети, либо в автономном режиме с использованием емкости для самовозбуждения.
Обычно синхронный генератор потребляет из сети реактивную мощность для создания магнитного потока. Чтобы перевести асинхронную машину в генераторный режим, ее нужно разгрузить, а затем вращать ротор со скоростью выше синхронной (n>n1), при этом скольжение становится отрицательным. Фаза ЭДС ротора изменяется на 180. Это приводит к тому, что активная составляющая тока ротора изменит свой знак, а реактивная составляющая оставит свое направление, т.к. независимо от режима машиной потребляется реактивная мощность для создания магнитного потока.
Докажем это аналитически. Ток в роторе
 ,
из рис.1. ток
,
из рис.1. ток
![]() ,
, тогда
тогда ,
т.е. при скольженииS<
0,
,
т.е. при скольженииS<
0,
то активная составляющая тока ротора изменит свой знак.
Активная составляющая тока ротора I2rне изменит своего знака при переходе машины в генераторный режим.
![]() ,
,
 ,
,
Векторная диаграмма асинхронного генератора

Из векторной диаграммы, рис. 150 видно, что активная составляющая тока в роторе, а следовательно и активная составляющая тока в статоре изменили свой знак.
Рис. 150
3-8. Однофазный асинхронный двигатель
Однофазный асинхронный двигатель по своим рабочим характеристикам уступает 3хфазному. Но он имеет то преимущество, что питается от однофазной сети. У однофазного двигателя в пазах статора укладываются две обмотки сдвинутые в пространстве на 90эл. градусов. Но вторая (пусковая обмотка) используется только на период пуска, после чего она отключается. Ротор обычно короткозамкнутый. Однофазная обмотка создает пульсирующий магнитный поток, который можно разложить на прямой поток и обратный. При пуске (n = 0) моменты от прямого и обратного потока равны и противоположны. По этому пусковой момент Мп= 0 (рис.1). Если сдвинуть ротор по направлению прямого поля, то ротор разгонится до скорости близкой к скорости поля Фпр.

Его скорость n = n1(1 -S) по отношению к прямому полю. Скорость вращения обратного поля относительно ротора определится:
![]() ,
,
т.е. обратное поле
по отношению к ротору вращается почти
с двойной скоростью. Отсюда индуктивное
сопротивление ротора от обратного поля
![]() будет большим, а активная составляющая
тока в роторе будет малой и момент от
обратного поля будет малым. А момент от
прямого поля будет большим, т.к. скольжение
при разгоне уменьшается, уменьшается
Х2пр,
будет большим, а активная составляющая
тока в роторе будет малой и момент от
обратного поля будет малым. А момент от
прямого поля будет большим, т.к. скольжение
при разгоне уменьшается, уменьшается
Х2пр,
Рис. 151
а следовательно активная составляющая тока ротора от прямого поля будет возрастать и момент так же возрастет, что подтверждается на кривых момента от прямого и обратного поля.
И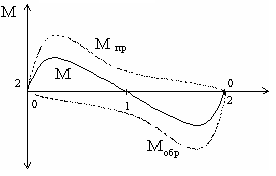 з
рис.152 видно, что при S = 1 пусковой момент
равен нулю (Мп= 0).
з
рис.152 видно, что при S = 1 пусковой момент
равен нулю (Мп= 0).
Для создания пускового момента используется пусковая обмотка. Обмотка возбуждения и пусковая обмотка создают вращающееся магнитное поле, которое наводит в обмотке ротора ЭДС и ток, и создается асинхронный момент.
Рис. 152
При пуске включается пусковая обмотка и создается асинхронный момент, после разгона ротора пусковая обмотка отключается ключом К, рис.153.

Условия создания кругового поля двумя обмотками:
Обмотки в пространстве должны быть сдвинуты на 90.
Т
Рис. 153
оки и потоки в обмотках должны быть сдвинуты во времени на 90.Намагничивающие силы обмоток должны быть равны FА= FВ
При невыполнении одного из них поле будет эллиптическим.
 На рис.154 представлены
разновидности полей (круговое, пульсирующее
и эллиптическое).
На рис.154 представлены
разновидности полей (круговое, пульсирующее
и эллиптическое).
Рис. 154
На рис.155 представлена зависимость момента от скольжения с учетом пусковой обмотки.
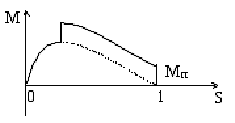
Рис. 155
Представим диаграммы токов обмоток при различных фазосдвигающих элементах, рис. 156.

Рис. 156
Наилучшим фазосдвигающим элементом является ёмкость.
Использование 3хфазного двигателя в однофазном режиме, рис. 157.
![]()
 ,
мкФ
,
мкФ
![]()
Рис. 157