

Системы координат. Связь координат соответственных точек местности и аэрокосмоснимка.
Координаты- числа, определяющие положение точки земной пов относительно начальных линий или поверхностей.СК, применяемые в фотограмметрии. Осн задача фотограмметрии – определить координаты точек объекта по их изображениям на снимках. Для этого надо выполнить измерения на снимках и установить связь между ск, в которых выполняются измерения на снимке, и ск, используемой на местности. Так, фотограмметрическая обработка связана с преобразованием ск. Введем следующие ск.
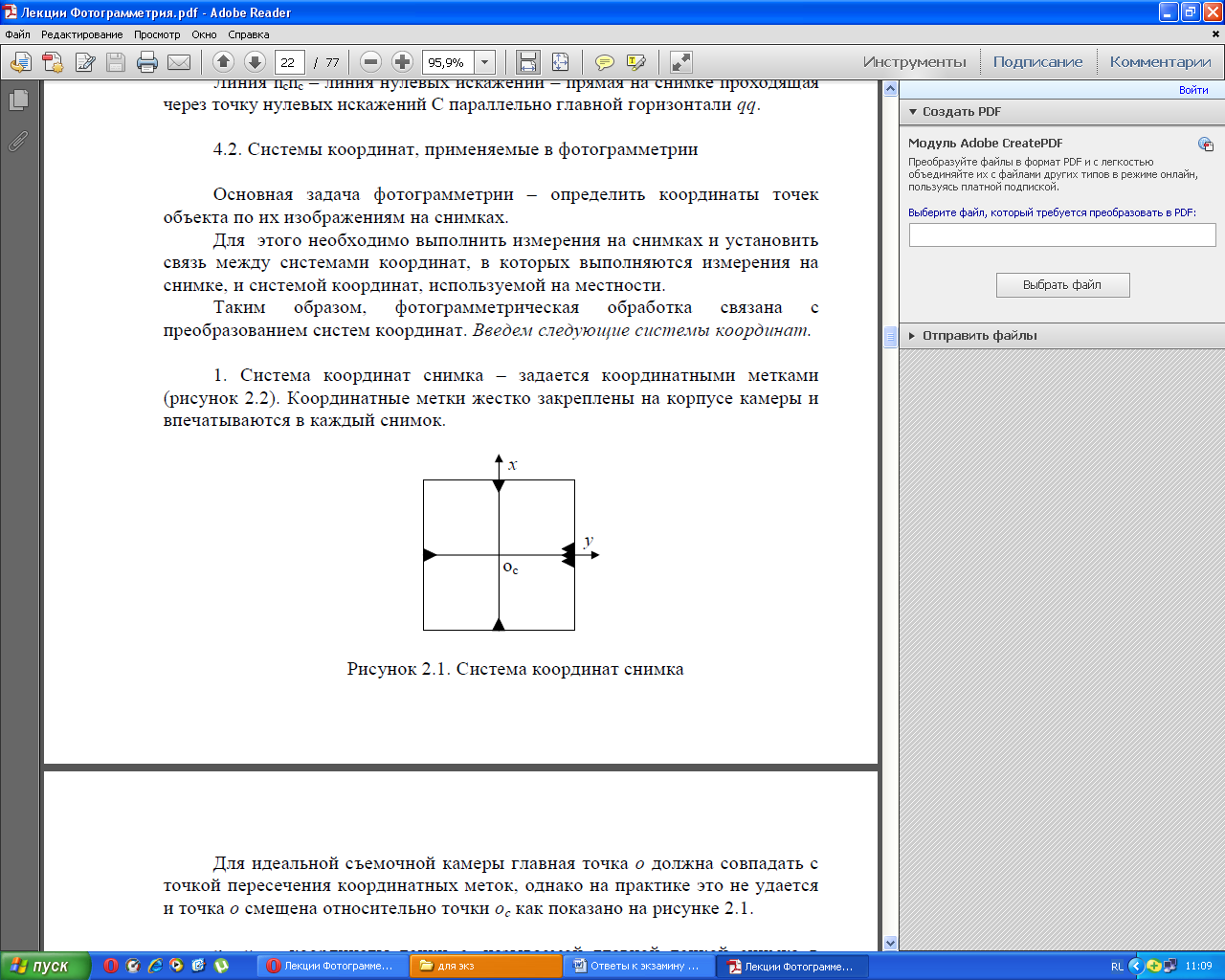 1.
Ск снимка
– задается координатными метками (рис
1). Координатные метки жестко закреплены
на корпусе камеры и впечатываются в
каждый снимок. Для идеальной съемочной
камеры главная точка о
должна
совпадать с точкой пересечения
координатных меток, однако на практике
точка о
смещена
относительно ос
как показано
на рис. xo,
yo
– координаты
точки o (гл
точка снимка).m
(x,y) –
координаты точки изображения в ск
снимка. Положение точки S
определяется
элементами внутр ориентирования (f,
xo,
yo).
1.
Ск снимка
– задается координатными метками (рис
1). Координатные метки жестко закреплены
на корпусе камеры и впечатываются в
каждый снимок. Для идеальной съемочной
камеры главная точка о
должна
совпадать с точкой пересечения
координатных меток, однако на практике
точка о
смещена
относительно ос
как показано
на рис. xo,
yo
– координаты
точки o (гл
точка снимка).m
(x,y) –
координаты точки изображения в ск
снимка. Положение точки S
определяется
элементами внутр ориентирования (f,
xo,
yo).
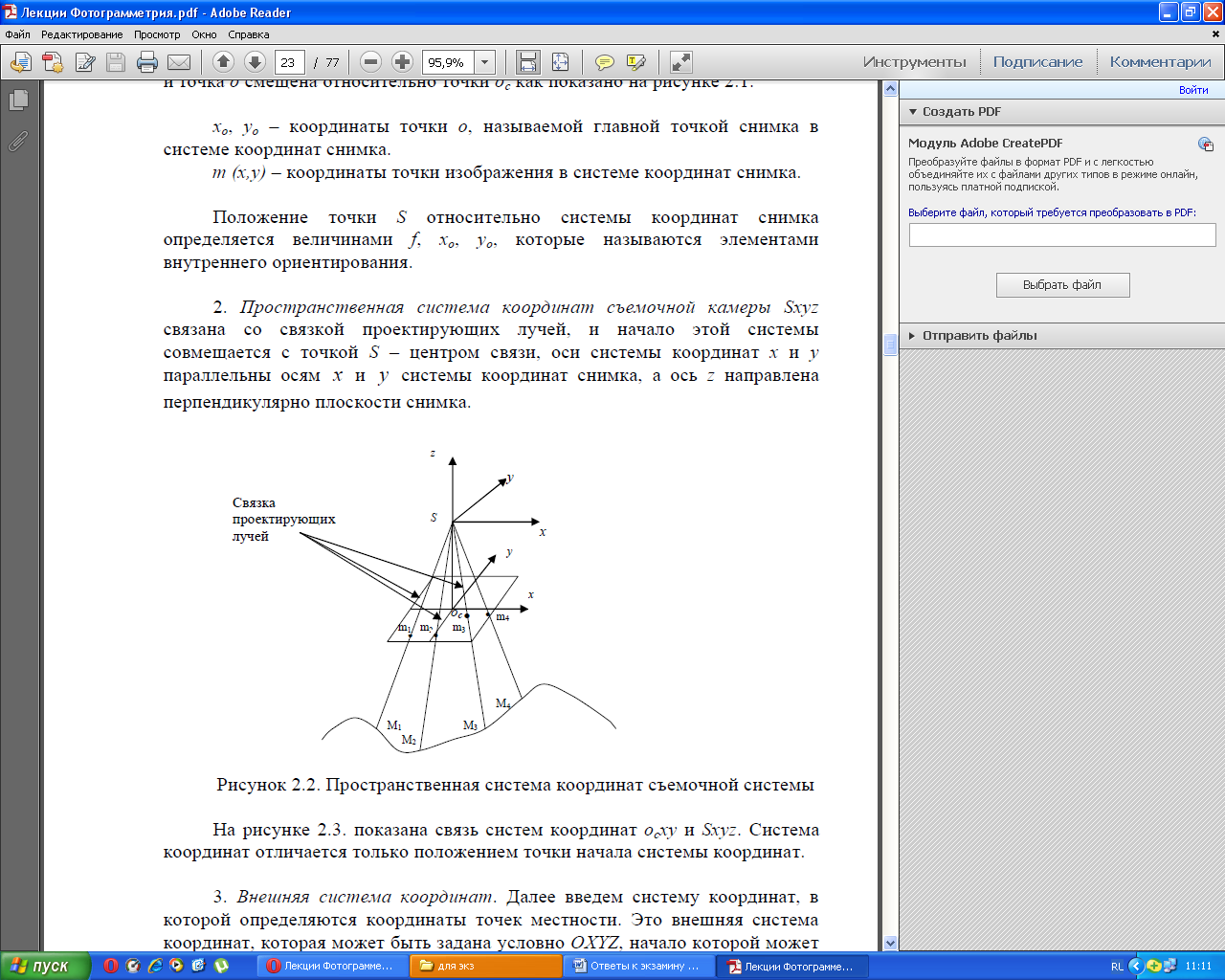 2.
Пространственная
ск съемочной камеры Sxyz
связана
со связкой проектирующих лучей, и начало
этой системы совмещается с точкой S
– центром
связи, оси системы координат x
и y
параллельны
осям x и
y системы
координат снимка, а ось z
направлена
перпендикулярно плоскости снимка. 3.
Внешняя
ск. Далее
введем ск, в которой определяются
координаты точек местности. Это внешняя
ск, которая может быть задана условно
OXYZ,
начало которой может быть расположено
в произвольной точке местности и
расположения осей X,
Y и
Z выбирается
так, чтобы этой системой было удобно
пользоваться при решении фотограмметрических
задач; в качестве внешней ск можно исп
геодезическую ск. 4.Фотограмметрическая
ск.
Введем еще
одну доп ск, которую в дальнейшем будем
называть фотограмметрической S'X'Y'Z'.
Начало ск в точке S,
а оси направлены параллельно осям
внешней ск OXYZ.
На рисунке 3 показана связь всех введенных
систем координат.Как видно из рисунка
3, ск SX'Y'Z' и
Sxyz отличаются
только разворотом ск. Как известно,
переход от ск Sxyz
к системе
координат SX'Y'Z'
можно осущ
путем последовательного поворота на
три угла Эйлера. Положение системы Sxyz
относительно
SX'Y'Z' описывается
матрицей поворота А
2.
Пространственная
ск съемочной камеры Sxyz
связана
со связкой проектирующих лучей, и начало
этой системы совмещается с точкой S
– центром
связи, оси системы координат x
и y
параллельны
осям x и
y системы
координат снимка, а ось z
направлена
перпендикулярно плоскости снимка. 3.
Внешняя
ск. Далее
введем ск, в которой определяются
координаты точек местности. Это внешняя
ск, которая может быть задана условно
OXYZ,
начало которой может быть расположено
в произвольной точке местности и
расположения осей X,
Y и
Z выбирается
так, чтобы этой системой было удобно
пользоваться при решении фотограмметрических
задач; в качестве внешней ск можно исп
геодезическую ск. 4.Фотограмметрическая
ск.
Введем еще
одну доп ск, которую в дальнейшем будем
называть фотограмметрической S'X'Y'Z'.
Начало ск в точке S,
а оси направлены параллельно осям
внешней ск OXYZ.
На рисунке 3 показана связь всех введенных
систем координат.Как видно из рисунка
3, ск SX'Y'Z' и
Sxyz отличаются
только разворотом ск. Как известно,
переход от ск Sxyz
к системе
координат SX'Y'Z'
можно осущ
путем последовательного поворота на
три угла Эйлера. Положение системы Sxyz
относительно
SX'Y'Z' описывается
матрицей поворота А
г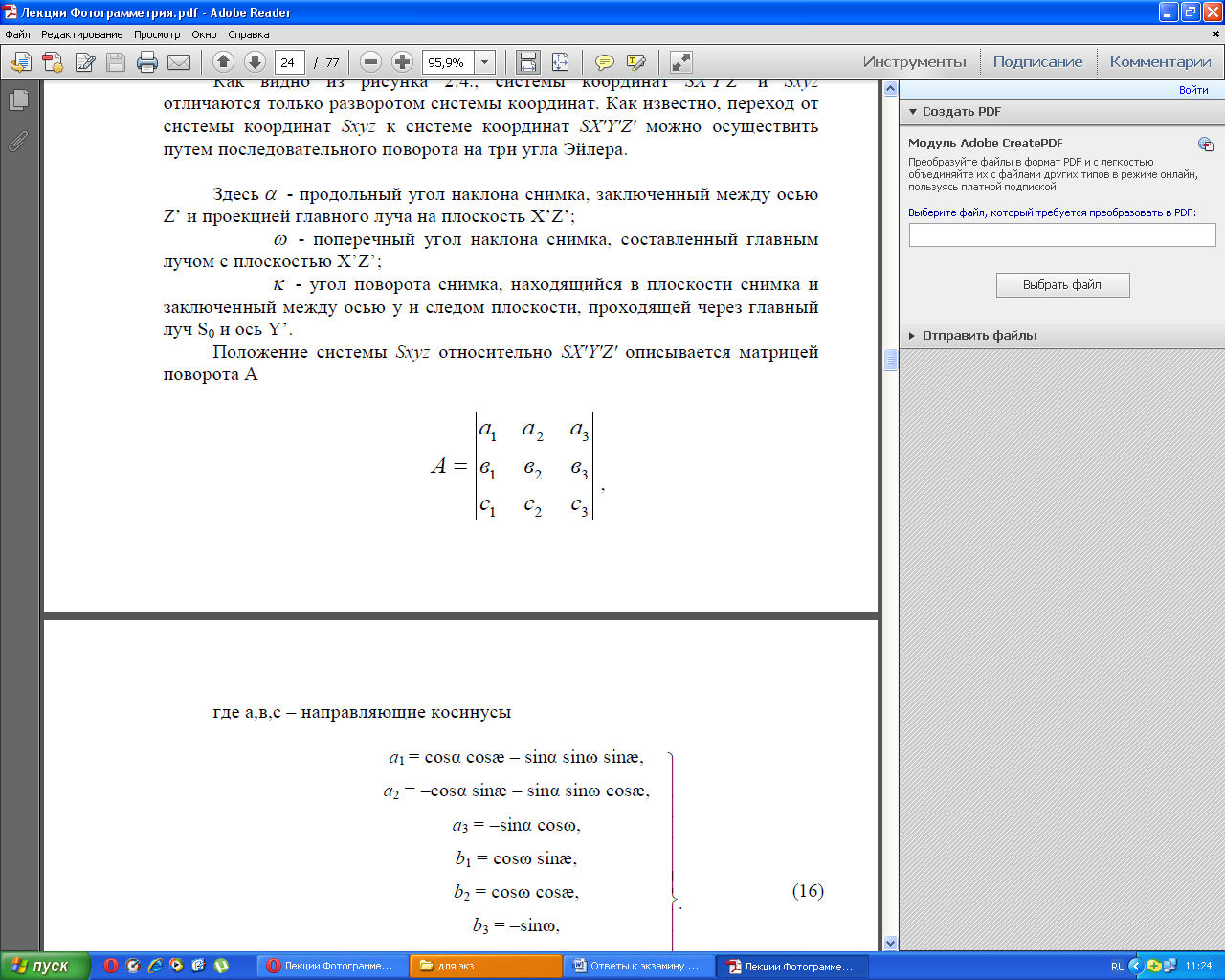 де
а,в,с – направляющие косинусы
де
а,в,с – направляющие косинусы
Тогда пространственные координаты точки m в ск SX'Y'Z'будут равны:

Положение системы координат Sxyz и системы OXYZ полностью определяется шестью параметрами: XS,YS,ZS – координатами центра проекции в ск OXYZ и углами α,ώ,κ характеризующими угловое положение снимка в момент съемки. Величины XS,YS,ZS, α,ώ,κ - элементы внешнего ориентирования снимков. Таким образом, с пом элементов внутреннего и внешнего ориентирования снимков устанавливается связь между ск oxy и ОXYZ.
Связь координат точки местности и координат точки на снимке.
x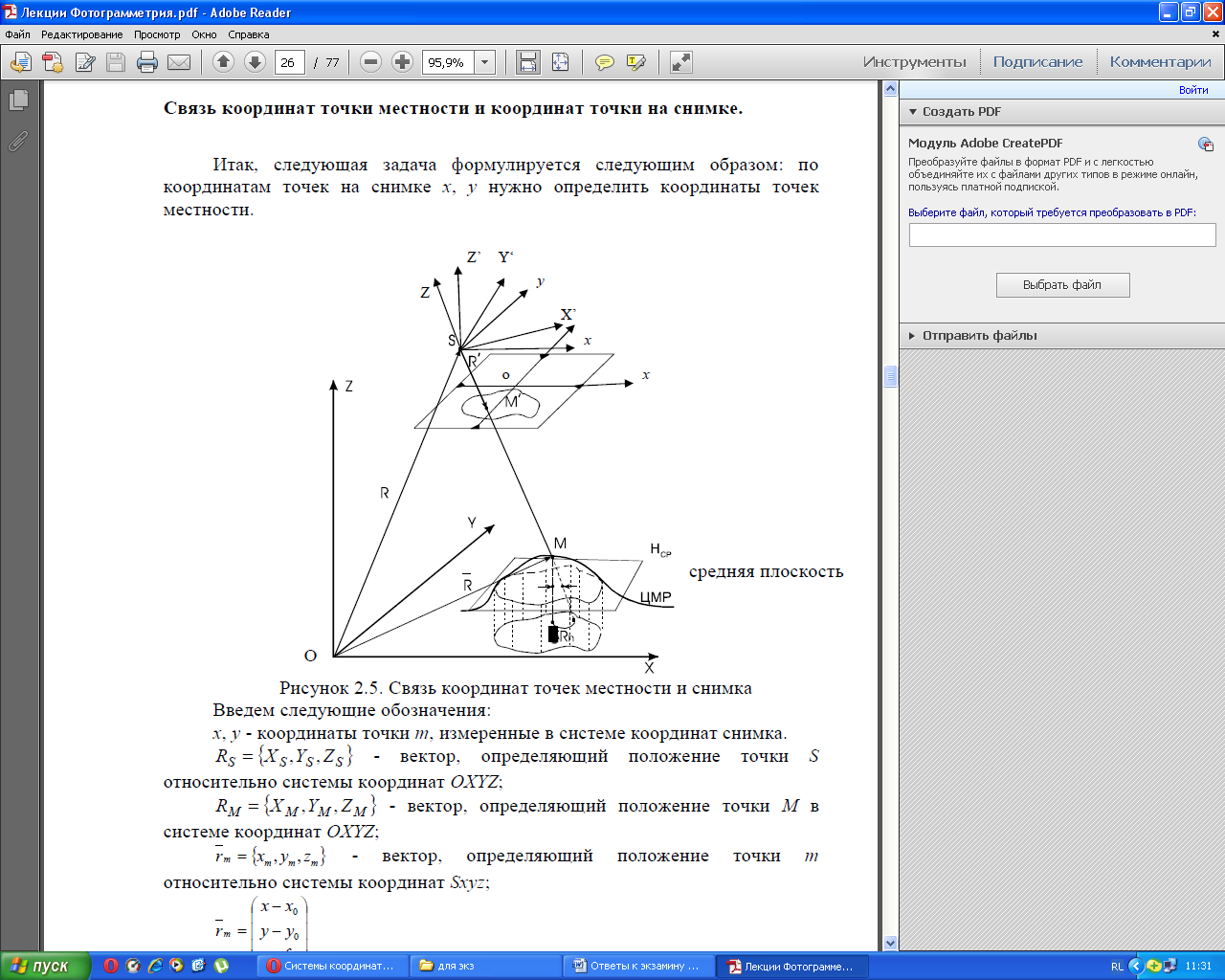 ,
y
-
координаты точки m,
измеренные в ск снимка.
,
y
-
координаты точки m,
измеренные в ск снимка.
RS={XS ,YS ,ZS} - вектор, определяющий положение точки S относительно ск OXYZ;
RM={XМ ,YМ ,ZМ} - вектор, определяющий положение точки M в ск OXYZ;
rm={xm,
ym,
zm}
-
вектор, определяющий положение точки
m
относительно
ск Sxyz;
R'M - вектор, определяющий положение точки M в ск Sxyz;
можно сделать вывод, что по одиночному снимку нельзя определить пространственные координаты точки местности, нужно знать коэффициент, который зависит от высоты точки местности Z, то есть от рельефа пов. Матем модель, описывающая пов в виде Z = f (X,Y ) , называется цифровой моделью поверхности или цифровой моделью рельефа (ЦМР). Зная ЦМР, можно по снимку определить координаты X и Y точек местности, вычислив высоту для каждой точки. Отсюда: по одному снимку местности можно определить координаты X и Y точек местности, если известны элементы внутреннего ориентирования и внешнего ориентирования снимков и значения высот точек местности.