

1.3.3.3 Метод планов скоростей и ускорений
В кинематике твердого тела рассмотрены векторные уравнения, связывающие скорости и ускорения точек плоскостей фигуры, и уравнения, связывающие скорости и ускорения в относительном движении. Эти векторные уравнения можно решать графическим способом путем построения планов скоростей и ускорений.
Для построения планов скоростей и ускорений механизма необходимо иметь план механизма при определенном положении начального звена, угловую скорость и угловое ускорение этого звена. Построив планы скоростей и ускорений механизма, можно определить угловые скорости и ускорения всех его звеньев и линейные скорости и ускорения отдельных точек звеньев. Планы скоростей и ускорений строят для каждой из структурных групп, из которых составлен механизм, а для этого необходимо знать скорости и ускорения точек присоединения структурной группы к исходному механизму. Тогда можно построить план и определить по нему неизвестные скорости и ускорения любой точки звеньев структурной группы. Пример анализа механизма методом планов скоростей и ускорений приведен в приложении В.
1.3.3.4 Определение скоростей и ускорений точек и звеньев механизмов по аналогам скоростей и ускорений
Перемещения, скорости и ускорения звеньев и точек звеньев механизма являются функциями перемещений, скоростей и ускорений входных или ведущих звеньев, которым сообщается движение. Если ведущим звеном является кривошип, то закон его движения может быть задан в виде φ = φ(t). Если ведущим звеном будет ползун, то закон движения может быть задан в виде s = s (t).
Однако всякий механизм, независимо от того в состав какой машины или прибора он входит, обладает определенными кинематическими свойствами, не зависящими от закона изменения параметров угла поворота или перемещения ведущего звена. Эти параметры мы будем называть обобщенными координатами. Не зная истинного закона изменения обобщенной координаты, можно определить зависимости кинематических параметров звеньев и точек механизма от обобщенной координаты с помощью безразмерных величин аналогов угловых скоростей и аналогов ускорений. Аналоги скоростей и ускорений зависят только от структуры и геометрии механизма и не зависят от абсолютных значений скорости ведущего звена. Таким образом, задача определения скоростей и ускорений в механизмах сводится к отысканию аналогов скоростей и ускорений для звеньев и точек звеньев механизма. Истинные скорости и ускорения после решения этой задачи определяют с помощью формул.
2 Описание объекта исследования
В качестве объекта исследования выбран рычажный механизм перемещения долбяка. Чертеж механизма и его параметры приведены в приложении Б.
3 Результаты кинематического исследования
В результате кинематического исследования механизма были определены положения всех звеньев и траекторий отдельных точек звеньев,
а также определены линейные скорости и ускорения точек и угловые скорости и ускорения звеньев механизма.
На основе этих исследований построена кинематическая диаграмма перемещений выходного звена S (t). Также кинематические диаграммы скорости выходного звена V (t) и ускорения выходного звена a (t) путем дифференцирования.
4 Выводы
Результатом работы является знакомство с методами кинематического исследования плоскорычажных механизмов, на основе которых был исследован данный механизм и построена кинематическая диаграмма перемещений, скорости и ускорения выходного звена.
Список литературы
1. Артоболевский И.И. Теория механизмов и машин: Учебник для втузов – М.: Наука. Главная редакция физико–математической литературы, 1988.
2. Ванторин В.Д. Механизмы приборных и вычислительных систем. Учебное пособие для приборостроительных специальных вузов. – М.: Высш. шк., 1985. – 416 с.,ил.
3. Иосилевич Г.Б. и др. Прикладная механика. Учебное пособие для вузов под ред. Иосилевича Г.Б. – М.: Высшая школа, 1989 – 357 с., ил.
4. Крайнев А.Ф. Словарь–справочник по механизмам – 2–е издание, переработанное и доп. – М. : Машиностроение, 1987 – 560 с.
5. Красковский Е.Я. и др. Расчет и конструирование механизмов приборов и вычислительных систем. Учебное пособие для спец. вузов – М.: Высшая школа, 1983 –431 с., ил.
6. Левитский Н.И. Теория машин и механизмов. – М .: Наука. Главная редакция физико–математической литературы, 1979.
7. Справочник конструктора РЭА: компоненты, механизмы, надежность. Барканов Н.А. и др. под ред. Варламова – М.: Радио и связь, 1985 – 384 с., ил.
Приложение А
Стандарты и нормативные документы
ГОСТ 2.701 – 84 ЕСКД. Схемы. Виды и типы.
ГОСТ 2.721 – 74 ЕСКД. Обозначения условные графические в схемах (ОУГС). Обозначения общего применения.
ГОСТ 2.770 –68 ЕСКД. ОГУС. Элементы кинематики.
СТП 1.302 – 96. Отчет о лабораторной работе. Правила изложения и оформления.
СТП 1.701 –98 УСУД. Текстовые документы. Общие требования к построению и оформлению.
Приложение Б
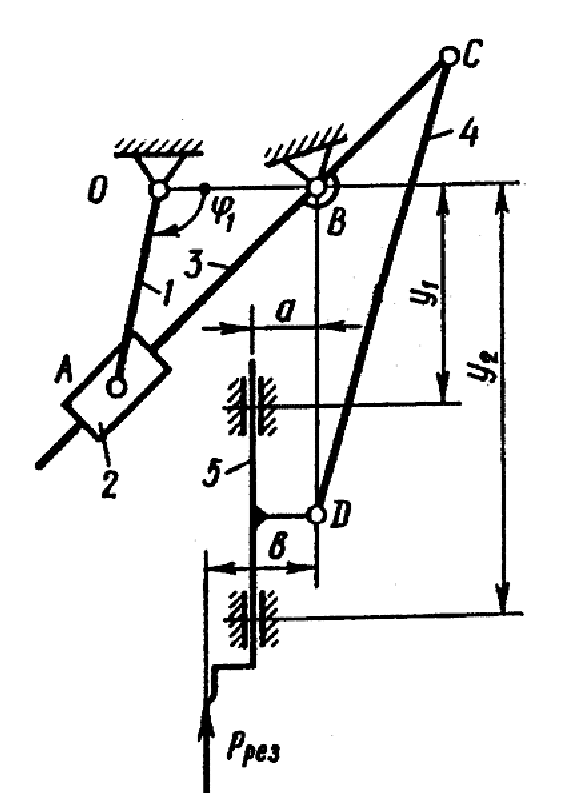
Рисунок Б1 – Рычажный механизм перемещения долбяка
Параметры звеньев рычажного механизма, изображенного на рисунке Б1 приведены в таблице Б1.
Таблица Б1
|
Параметры |
Обозначениение |
Размерность |
Вариант числовых значений |
|
4 |
|||
|
Размеры звеньев рычажного механизма |
lOA |
м |
0,14 |
|
lOB |
м |
0,08 |
|
|
lBC |
м |
0,12 |
|
|
lCD |
м |
0,56 |
|
|
a |
м |
0,02 |
|
|
b |
м |
0,03 |
|
|
y1 |
м |
0,44 |
|
|
y2 |
м |
0,68 |
|
|
Частота вращения кривошипа 1 |
n1 |
об/мин. |
160 |