

Министерство образования и науки РФ
Федеральное государственное бюджетное образовательное учреждение
высшего профессионального образования
Новгородский государственный университет имени Ярослава Мудрого
Институт электронных и информационных систем
Кафедра “Проектирование и технология радиоаппаратуры”
Анализ плоскорычажных механизмов
Лабораторная работа по курсу
“ Прикладная механика ”
для направления 210200.62 –
“Проектирование и технология электронных средств”
Отчёт
Преподаватель:
О. Н. Петрова
“__”_______2012 г.
Студенты гр. 9021:
К.М. Гурьянов
“__”_______2012 г.
1 Цель работы
Целью работы является знакомство с методами кинематического исследования плоскорычажных механизмов.
1.2 Основные теоретические положения
1.2.1 Цели кинематического исследования
Движение реальных механизмов машин происходит под действием различных сил и является переменным во времени в соответствии с изменением режимов и назначением машин. При кинематическом исследовании механизмов решаются две основные задачи:
– определение положения всех звеньев и траекторий отдельных точек звеньев механизма;
– определение линейных скоростей и ускорений точек и угловых скоростей и ускорений звеньев механизма.
Построение положений звеньев механизма и траекторий их наиболее характерных точек дает возможность анализировать правильность действия механизма, соответствие траекторий движения рабочих органов машин технологическим процессам, для осуществления которых они предназначены, а также определять пространство, необходимое для размещения механизма. Знание скоростей движения звеньев и их точек необходимо для определения кинетической энергии отдельных звеньев и механизма в целом. По векторам ускорений определяют величины и направления сил инерции, а следовательно, и действительных нагрузок, приложенных к деталям механизмов, по которым можно проверить прочность деталей эксплуатируемых машин или рассчитать размеры проектируемых машин, гарантирующие их прочность. По известным силам и перемещениям звеньев определяют КПД машин и мощность, необходимую для их источников энергии.
1.2.2 Основные положения теории механизмов
Механизм есть система тел, предназначенная для преобразования движения одного или нескольких тел в требуемое движение других тел. основным признаком механизма является преобразование механического движения.
Звено механизма – одно или несколько неподвижно соединенных твердых тел (деталей), входящих в состав механизма.
В каждом механизме имеется стойка, то есть неподвижное звено или звено, принимаемое за неподвижное. Из подвижных звеньев выделяют входные и выходные звенья. Входным звеном называется звено, которому сообщается движение, преобразуемое механизмом в требуемое движение других звеньев. Выходным звеном называется звено, совершающее движение, для выполнения которого предназначен механизм. Остальные подвижные звенья называются соединительными или промежуточными.
Ведущим звеном называется звено, для которого элементарная работа внешних сил, приложенных к нему, является положительной. Ведомым звеном называется звено, для которого элементарная работа внешних сил, приложенных к нему, является отрицательной или равна нулю.
Подвижное соединение двух соприкасающихся звеньев называется кинематической парой.
Числом степеней свободы механической системы называется число возможных перемещений системы. Для твердого тела, свободно движущегося в пространстве, число степеней свободы равно шести: три возможных перемещения вдоль неподвижных координатных осей и три – вокруг этих осей. Для звеньев, входящих в кинематическую пару, число степеней свободы в их относительном движении всегда меньше шести. Все кинематические пары подразделены по числу степеней свободы на одно– , двух–, трех–, четырех–, пяти–подвижные.
Совокупность поверхностей, линий и отдельных точек звена, по которым оно может соприкасаться с другим звеном, образуя кинематическую пару, называется элементом кинематической пары. Кинематическая пара, в которой требуемое относительное движение звеньев может быть получено постоянным соприкасанием ее элементов к поверхности, называется низшей парой. Высшая пара определяется как кинематическая пара, в которой требуемое относительное движение звеньев может быть получено только соприкасанием ее элементов по линии и в точках.
Кинематической цепью называется система звеньев, образующих между собой кинематические пары. Простой кинематической цепью называется цепь, в которой каждое звено входит не более чем в две кинематические пары, а сложной – в которой имеется хотя бы одно звено, входящее более чем в две кинематические пары. Незамкнутой называют такую кинематическую цепь, в которой есть звенья, входящие в одну кинематическую пару, а замкнутой – в которой каждое звено входит по крайней мере в две кинематические пары.
Кинематическая цепь, конструктивно заменяющая в механизме кинематическую пару, называется кинематическим соединением.
Кинематической парой первого класса – пятиподвижной парой – называют пару, накладывающую одно условие связи, например шар на плоскости. Кинематической парой второго класса – четырехподвижной парой – называют пару, накладывающую два условия связи, например цилиндр на плоскости.
Все механизмы и кинематические цепи делятся на плоские и пространственные. Плоскими называются такие механизмы, все точки звеньев которых движутся в параллельных плоскостях. Остальные механизмы – пространственные. В плоских механизмах число независимых движений звена равно трем, следовательно, число классов пар может быть только два, поэтому в плоских механизмах могут быть лишь пары четвертого и пятого классов.
Рассмотрим плоский механизм, имеющий п подвижных звеньев. В плоском механизме каждое звено имеет три степени свободы. Следовательно, число степеней свободы у п звеньев равно 3 п. В плоском механизме могут быть только кинематические пары четвертого и пятого классов, при этом пары пятого класса накладывают два условия связи и являются низшими парами; число их обозначим рз. Пары четвертого класса накладывают одно условие связи, они являются высшими парами; их число обозначим р4. Число степеней свободы механизма показывает скольким звеньям нужно задать движение, чтобы движение остальных звеньев было вполне определенным. Для определения числа степеней свободы плоского механизма надо из числа 3 п вычесть связи, накладываемые кинематическими парами, которые выражаются формулой (1).
W = 3n – 2p5 – p4 (1)
Формула (1) называется структурной формулой плоского механизма или формулой Чебышева.
Ввиду большого разнообразия существующих механизмов их целесообразно классифицировать. Классификация должна способствовать изучению и разработке общих методов их структурного, кинематического и динамического анализа и методов проектирования. Этой цели наиболее полно служит структурная классификация, согласно которой все механизмы разделяются на классы. Для каждого класса разработаны общие методы структурного, кинематического и динамического исследования. Большой вклад в создание структурной классификации внес советский ученый академик И.И. Артоболевский.
Начальными звеньями называют звенья, положение которых определяет положение механизма. В механизме с одной степенью свободы – одно начальное звено. Если начальное звено совершает вращательные движения, то его положение определяется углом поворота. Если начальное звено движется прямолинейно, то его положение определяется линейным перемещением. В механизмах с двумя степенями свободы имеется два начальных звена и так далее. Начальное звено не обязательно должно совпадать со входным звеном.
Механизмы различных классов образуются последовательным присоединением к начальным звеньям кинематических цепей, называемых структурными группами.
Структурными группами или группами Ассура, называют кинематические цепи, обладающие свойством не изменять подвижности механизма, к которому их присоединяют. Если структурную группу присоединить, например к стойке, то она будет обладать нулевой подвижностью, то есть становится жесткой системой.
Если из множества возможных плоских кинематических цепей выделить цепи, являющиеся структурными группами, то согласно формуле (1) они должны после присоединения их к стойке удовлетворять уравнению (2)
W = 3n – 2p5 – p4 = 0 (2)
При отсутствии в цепи высших пар четвертого класса получим уравнение (3)
W = 3n – 2ps = 0 (3)
Это уравнение (3) можно назвать уравнением структурной группы с низшими парами. Ему должны удовлетворять числа звеньев и числа кинематических пар, содержащихся в ней. Уравнению (2) удовлетворяет ряд целых чисел : n = 2, 4, 6, 8 и так далее; p5 = 3, 6, 9, 12 и так далее.
Отсюда видно, что простейшей структурной группой будет кинематическая цепь из двух звеньев с тремя кинематическими парами. Такая структурная группа называется группой второго класса или двухподвижной группой. В зависимости от числа и относительного расположения вращательных и поступательных пар группы второго класса делят на пять видов, которые показаны на рисунке 1.
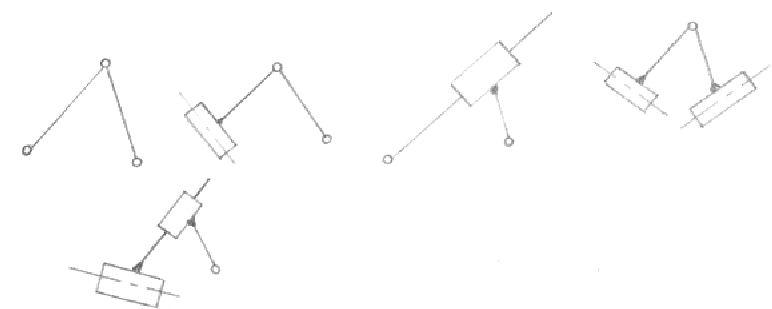
Рисунок 1 – Виды групп второго класса.
Если любую из этих групп свободными парами присоединить к стойке, то они становятся неподвижными.
Следующим решением уравнения (3) будет структурная группа, содержащая четыре звена и шесть кинематических пар. Такая группа называется структурной группой третьего класса. Могут входить не только вращательные, но и поступательные кинематические пары, которые показаны на рисунке 2.
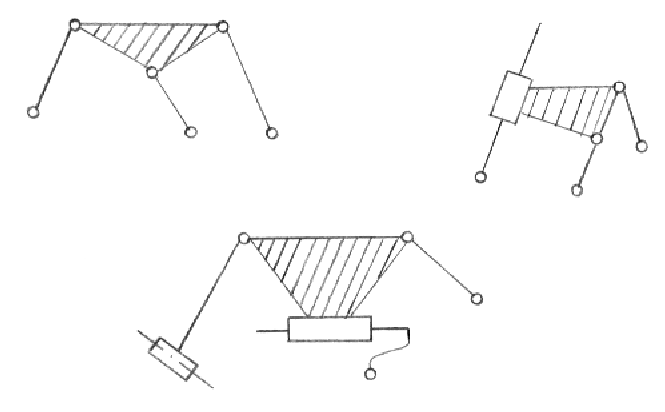
1 – вращательная кинематическая пара; 2,3 – поступательные кинематические пары.
Рисунок 2 – Виды групп третьего класса.
Присоединяя любую из этих групп свободными парами к стойке, получим жесткие системы.
Другая кинематическая цепь, удовлетворяющая уравнению (3) и состоящая из четырех звеньев и шести пар показана на рисунке 3.
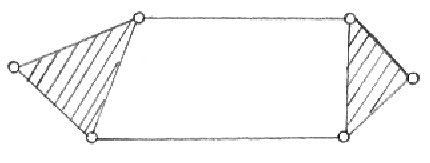
Рисунок 3 – Структурная группа четвертого класса.
Структурная группа четвертого класса имеет две свободные пары. Группы более высоких классов в механизмах встречаются редко.
Структурным группам присваиваются номера класса и порядка. Порядок определяется числом свободных кинематических пар, или поводков, которыми группа присоединяется к механизму или стойке. Класс структурной группы определяется числом внутренних кинематических пар, которыми образуется самый сложный замкнутый контур в группе.
Например, в группе четвертого класса такой контур образуется четырьмя парами, и эта группа имеет два поводка, то есть второй порядок. В группе третьего класса три пары образуют замкнутый контур, а порядок ее будет третьим, так как она имеет три поводка. Группы второго класса имеют второй порядок, а контур образуется одним звеном, входящим в две кинематические пары.
Согласно структурной классификации, разработанной JI.B. Ассуром, И.И. Артоболевским любой плоский механизм получается присоединением структурных групп к начальному звену и стойке. И наоборот, плоский механизм всегда можно разделить на начальные звенья и составляющие его структурные группы. Эти структурные группы и определяют строение механизма. Определить строение механизма – это значит установить из каких структурных групп состоит данный механизм и в каком порядке эти структурные группы присоединены к начальным звеньям и стойке.
Механизмы, в состав которых входят начальное звено и структурные группы второго класса, называются механизмами второго класса. Механизмы, в состав которых входят структурные группы третьего класса или второго и третьего классов, называются механизмами третьего класса и так далее.
Среди разнообразных рычажных механизмов наиболее распространенными являются плоские четырехзвенные механизмы. Они могут иметь четыре шарнира, три шарнира и одну поступательную пару или два шарнира и две поступательные пары.
Шарнирный четырехзвенник, показанный на рисунке 4, называют кривошипно–коромысловым механизмом.
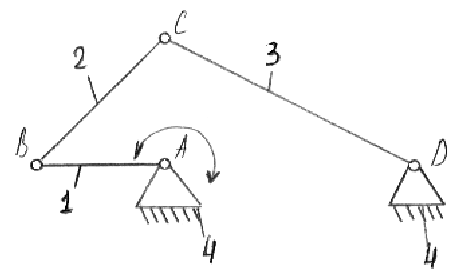
1–кривошип; 2–звено; 3–коромысло; 4–стойка.
Рисунок 4 – Шарнирный четырехзвенник.
Его ведущее звено – кривошип – совершает полно оборотное вращение, звено 2 – плоскопараллельное движение, а ведомое звено – коромысло – выполняет качательное движение. Звено 1 имеет наименьшую длину, может быть кривошипом, если его длина в сумме с самым длинным звеном будет меньше суммы длин остальных звеньев ( правило Грасгофа ).расстояние AD считают длиной неподвижного звена – стойки. Механизм может применяться также для преобразования качательного движения во вращательное.
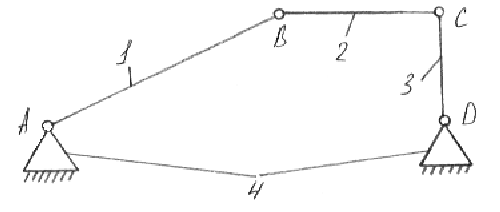
Двухкривошипный механизм, изображенный на рисунке 5, представляет собой другую разновидность шарнирного четырехзвенника: у него сумма длин самого короткого и самого длинного звеньев меньше суммы двух остальных звеньев, а за стойку принято самое короткое звено.
1,3 – кривошип; 2 – звено; 4 – стойка.
Рисунок 5 – Двухкривошипный механизм.
Такие механизмы преобразуют равномерное вращение ведущего звена в неравномерное вращение ведомого звена. В частном случае, когда длины противолежащих звеньев одинаковы, выходное звено также будет вращаться равномерно.
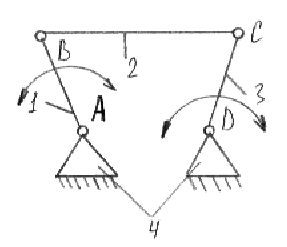
Двухкоромысловый механизм, изображенный на рисунке 6, также является шарнирным четырехзвенником, у которого размеры звеньев не удовлетворяют правилу Грасгофа или самое короткое звено механизма является шатуном.
1,3 – коромысло; 2 – шатун; 4 – стойка.
Рисунок 6 – Двухкоромысловый механизм.
Обычно такие механизмы используют для передачи на необходимое расстояние качательного движения, а также для приближенного воспроизведения заданной функции положения.
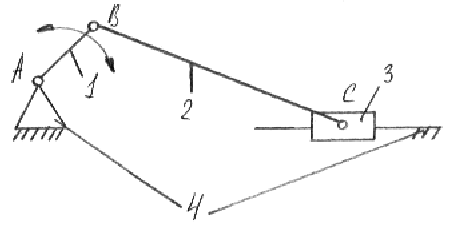
Выполняя вращательную пару С в форме дуговой направляющей радиуса р = CD и ползуна, получим механизм, который кинематически подобен кривошипно–коромысловому. [3] Однако такая конструкция нетехнологична. Обычно ее заменяют другой, у которой радиус р равен бесконечности, и получаемый механизм называют кривошипно–ползунным нецентральным, так как линия движения шарнира С не проходит через ось вращения кривошипа – точку А (рисунок 7).
1 – кривошип; 2 – звено; 3 – ползун; 4 – стойка.
Рисунок 7 – Кривошипно–ползунный механизм.
Нецентральность характеризуют длинной перпендикуляра 1, опущенного из центра А на линию движения ползуна. При 1 = 0 механизм превращается в кривошипно–ползунный центральный механизм, изображенный на рисунке 8.
1–кривошип; 2–шатун; 3–ползун; 4–стойка.
Рисунок 8 – Кривошипно–ползунный центральный механизм.
Кривошипно–ползунные механизмы широко применяют в поршневых двигателях, где ползуны называют поршнями. Поршень двигателя воспринимает движущую силу и поэтому является ведущим звеном. Здесь возвратно–поступательное движение поршня преобразуется с помощью шатуна 2 во вращательное движение кривошипа (коленчатого вала). В механизмах ряда машин, приборов и аппаратов кривошипно–ползунные
механизмы используют для преобразования вращательного движения кривошипа в поступательное движение ползуна.
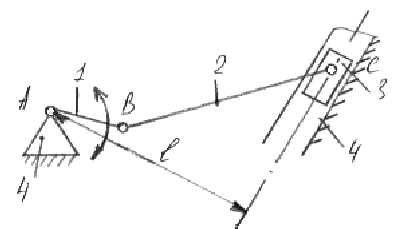
Если в таком механизме поступательную пару выполнить в виде штока, поршня и цилиндра, получим кривошипный механизм с качающимся цилиндром (рисунок 9), который применяется в судовых двигателях и других конструкциях.
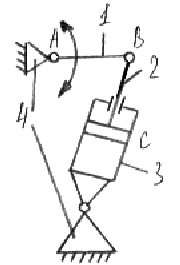
1 – кривошип; 2 – шток; 3 – цилиндр; 4 – стойка.
Рисунок 9 – Кривошипный механизм с качающимся цилиндром.
Находят применение синусные механизмы (рисунок 10), содержащие две вращательные и две поступательные пары, и другие типы четырехзвенных механизмов.
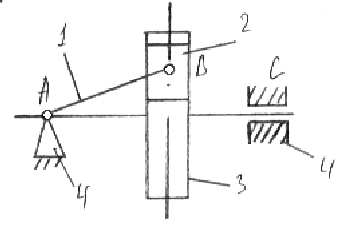
1 – кривошип; 2 – поршень; 3 – цилиндр; 4 – стойка.
Рисунок 10 – Синусный механизм.
1.3 Методики расчета
1.3.1 Общая характеристика метода
Для определения параметров движения звеньев механизма используют в основном аналитические, графические и экспериментальные методы.
Аналитические методы основываются на различных методах математического анализа и отличаются высокой точностью определения параметров в каждый момент времени работы механизма. При использовании ЭВМ, снабженных графическими дисплеями и графопостроителями, аналитические методы становятся наглядными.
Графические методы основаны на непосредственном построении траекторий движения наиболее характерных точек звеньев механизма. Они менее точны и эффективны для плоских механизмов. Их используют преимущественно в учебных задачах.
Экспериментальные методы используют преимущественно для оценки точности расчетных моделей и методов.