

3. Устройство манипулятора робота мп-9с
Манипулятор является исполнительным устройством робота. Основные узлы манипулятора следующие:
3.1 Механизм подъема. Обеспечивает перемещение руки робота вверх – вниз по вертикальной оси. На рисРис. 3. 3 изображены основные элементы механизма подъема манипулятора, электрические магнитоуправляемые контакты, электропневматические клапаны, а также элементы индикации модулей ввода и вывода дискретных сигналов устройства управления робота МП-9С.
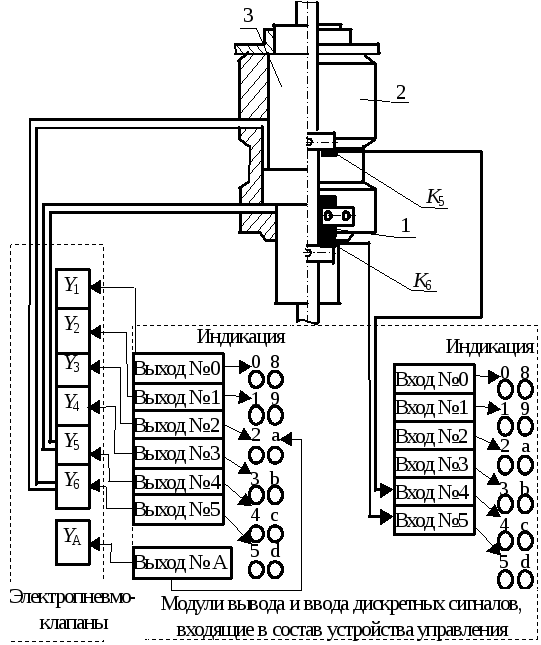
Механизм подъема (степень подвижности № 1): 1 – магнит; 2 – корпус; 3 – шток; К5, К6 – контакты электрические магнитоуправляемые (КЭМ); Y1, Y2, Y3, Y4, Y5, Y6, YА – электропневмоклапаны
На рисРис. 3. 3 видно, что сигнал с выхода № 4 устройства управления служит сигналом u11 входного алфавита циклового манипулятора, сигнал с выхода № 5 устройства управления – сигналом u12; сигналы от КЭМ К5 и К6 соответствуют сигналам y11 и y12 выходного алфавита циклового манипулятора и фиксируются модулем ввода дискретных сигналов устройства управления (входы № 4 и № 5).
Механизм поворота руки робота. Предназначен для поворота руки робота вокруг вертикальной оси. На рисРис. 4. 4 изображены основные элементы механизма поворота руки, электрические магнитоуправляемые контакты, электропневматические клапаны, а также элементы индикации модулей ввода и вывода дискретных сигналов устройства управления робота МП-9С.
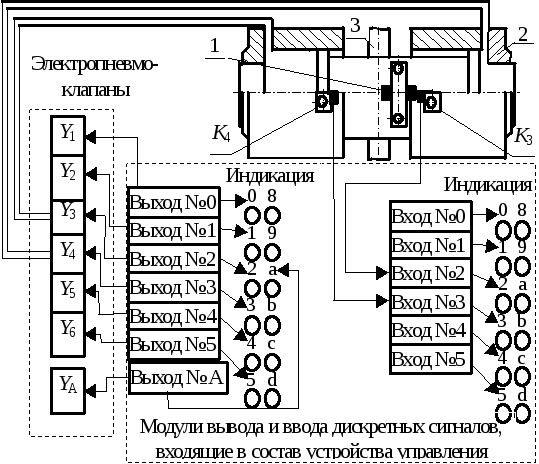
Механизм поворота (степень подвижности № 2): 1 – магнит; 2 – корпус; 3 – шток; К3, К4 – контакты электрические магнитоуправляемые (КЭМ); Y1, Y2, Y3, Y4, Y5, Y6, YА – электропневмоклапаны
На рисРис. 4. 4 видно, что сигналы с выходов № 2 и № 3 устройства управления служат сигналами u22 и u21 входного алфавита циклового манипулятора; сигналы от КЭМ К3 и К4 соответствуют сигналам y22 и y21 выходного алфавита циклового манипулятора и фиксируются модулем ввода дискретных сигналов устройства управления на входах № 2 и № 3.
Механизм выдвижения руки. Предназначен для выдвижения (втягивания) руки робота в радиальном направлении относительно общей оси вращения манипулятора. На рис. 5 изображены основные элементы механизма выдвижения руки, электрические магнитоуправляемые контакты, электропневматические клапаны, а также элементы индикации модулей ввода и вывода дискретных сигналов.
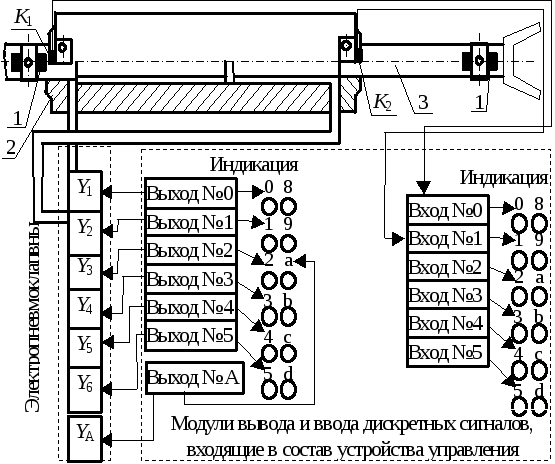
Механизм выдвижения руки (степень подвижности № 3): 1 – магнит; 2 – корпус; 3 – шток; К1, К2 – контакты электрические магнитоуправляемые (КЭМ); Y1, Y2, Y3, Y4, Y5, Y6, YА – электропневмоклапаны
На рисРис. 5. 5 видно, что сигналы с выходов № 0 и № 1 устройства управления служат сигналами u32 и u31 входного алфавита циклового манипулятора; сигналы от КЭМ К1 и К2 соответствуют сигналам y32 и y31 выходного алфавита циклового манипулятора и фиксируются модулем ввода дискретных сигналов устройства управления на входах № 0 и № 1.
4. Устройство управления эцпу-6030
Промышленный робот МП-9С оснащен программируемым цикловым устройством управления ЭЦПУ-6030
4.1 При подготовке устройства к работе ознакомьтесь с пультом управления (рис. 6)
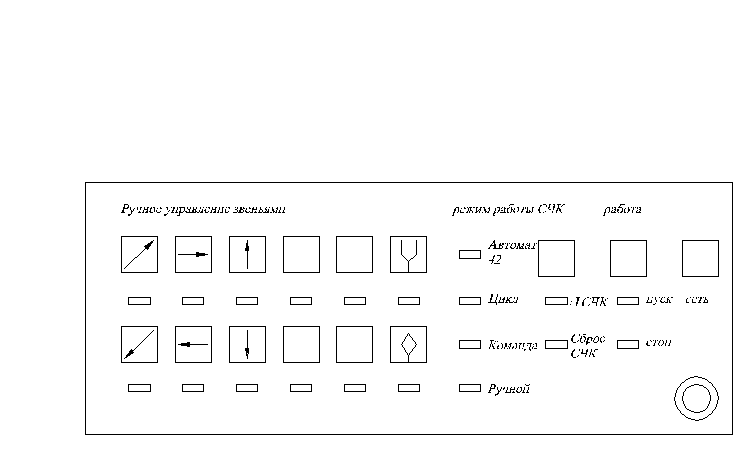 Рис.
6 Пульт управления ЭЦПУ-6030
Рис.
6 Пульт управления ЭЦПУ-6030
4.2 На пульте расположены следующие органы управления:
а) переключатель РЕЖИМ РАБОТЫ, устанавливающий один из 4-х возможных режимов управления (АВТОМАТ, ЦИКЛ, КОМАНДА или РУЧНОЙ);
б)12 кнопок ручного управления звеньями манипулятора;
в) кнопка ПУСК;
г) кнопка СТОП;
д) кнопка СБРОС СЧК;
е) кнопка +1СЧК;
ж) кнопка СЕТЬ.
4.3 На пульте размещены следующие элементы индикации:
а) табло индикации состояния звеньев манипулятора;
б) табло РАБОТА;
в) табло десятичной индикации номера шага;
г) табло СЕТЬ.
4.4 Установка режима работы устройства производится путем нажатия соответствующей кнопки переключателя режимов.
Кнопки ручного управления звеньями манипулятора функционируют только в режиме РУЧНОЙ.
Для того, чтобы вавести звено манипулятора в требуемое положение, необходимо нажать кнопку под табло индикации состояния звеньев, на котором нанесена соответствующая мнемоника
Команда ПУСК функционирует только в режимах АВТОМАТ, ЦИКЛ и КОМАНДА. Эта кнопка используется для запуска устройства. При нажатии на кнопку пуск загорается табло РАБОТА, которое горит до окончания работы устройства по программе.
Кнопка СТОП служит для остановки устройства, работающего по программе (при нажатии на кнопку СТОП питание устройства не отключается).
Кнопка СБРОС СЧК используется для предварительной установки счетчика кадров в начальное (нулевое) состояние.
Кнопка +1СЧК используется в процессе наладки для пуска программы с произвольного шага. Для установки на СЧК произвольного шага необходимо:
а) нажать кнопку СБРОС СЧК, то есть установить в счетчике кадров нулевой код;
б) многократно нажимая кнопку +1СЧК, установить желательный номер шага.
4.10 Контроль состояния СЧК осуществляется с помощью табло десятичной индикации.
Включение питания устройства производится с помощью кнопки СЕТЬ.
Выключение устройства ( в том числе аварийное) осуществляется кнопкой аварийного отключения устройства, расположенной в верхней части устройства.