

Федеральное агентство по образованию
Новгородский государственный университет
им. Я.Мудрого.
Кафедра технологии машиностроения.
Методические указания к лабораторной работе
Программирование промышленного робота МП-9С.
Великий Новгород
2005
ВВЕДЕНИЕ
Роботы и робототехнические системы (РТС) – перспективное направление автоматизации технологических процессов. Темпы производства роботов увеличиваются, особенно в развитых странах. Несмотря на конструктивное многообразие роботов, они имеют много общего в моделях описания движения и принципах программирования движения.
Существуют два способа программирования робота: обучение и программирование с помощью некоторого алгоритмического языка. Первый способ отличается простотой и не требует высокой квалификации человека-оператора, но не позволяет программировать сложные технические процессы. Языковое программирование более перспективно, так как практически не имеет ограничений по уровню сложности создаваемых программ и допускает интерактивное управление роботами.
Известны два различных подхода к созданию языка управления роботами. Один из них состоит в разработке нового, специально предназначенного для программирования робототехнических задач языка. При этом подходе предполагается, в частности, что синтаксис языка приспособлен к описанию поведения робота, то есть настолько понятен и экономичен, насколько это возможно.
Альтернативным подходом является использование традиционных универсальных языков программирования высокого уровня для решения задач робототехники, при условии, что выбранный язык позволяет определять необходимые структуры данных и управляющие команды манипулятора.
Цель работы: изучение устройства промышленного робота МП-9С, получение навыков разработки и отладки алгоритмов и программ для управления роботом.
1. Краткое описание робота мп-9с
Промышленный робот МП-9С предназначен для выполнения операций транспортирования и ориентации деталей. Робот может работать в составе робототехнических комплексов и гибких автоматизированных производств.
В состав робота МП-9С входят:
манипулятор, технические параметры которого приведены в табл. Таблица 1; устройство управления робота МП-9С.
В качестве управляющего устройства робота используется микропроцессорное программируемое цикловое устройство ЭЦПУ-6030.
2. Манипулятор робота мп-9с
Кинематическая схема манипулятора робота МП-9С приведена на рисРис. 1. . Приводы всех звеньев и схвата робота – пневматические. В табл. Таблица 1 приведены некоторые технические параметры манипулятора робота МП-9С.
Технические параметры манипулятора робота МП-9С
|
Параметр |
Значение | |
|
Грузоподъемность, включая массу схвата, кг |
0,8 | |
|
Потребляемая мощность, Вт |
250 | |
|
Максимальная скорость перемещения звеньев манипулятора |
степень подвижности № 1, м/с |
0,12 |
|
степень подвижности № 2, /с |
300 | |
|
степень подвижности № 3, м/с |
0,75 | |
|
Максимальная величина перемещения звеньев манипулятора |
степень подвижности № 1, мм |
30 |
|
степень подвижности № 2, |
120 | |
|
степень подвижности № 3, мм |
150 | |
|
Масса робота, кг |
57 | |
2.1 Манипулятор робота МП-9С как конечный автомат
Спецификой циклового манипулятора является то, что он может находиться в конечном числе состояний. Манипулятор робота МП-9С (кинематическая схема которого приведена на рисРис. 1. ) представляет собой механизм с тремя степенями подвижности, каждая из которых перемещается с помощью двух пневмоприводов и имеет по две точки позиционирования. Таким образом, область достижимости этого манипулятора представляет собой конечное множество, состоящее из восьми точек x1, x2, . . . , x8 (рисРис. 2. ).
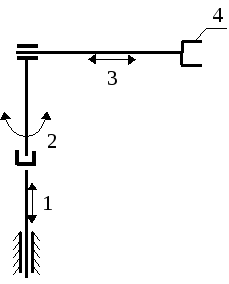
Кинематическая схема манипулятора: 1, 2, 3 – степени подвижности; 4 – схват
Если манипулятор имеет k степеней подвижности, каждая из которых содержит pi точек позиционирования (i = 1, 2, , k), то число точек n, куда может попасть захват, можно записать следующим образом:
![]() .
.
Цикловой манипулятор снабжен восемью путевыми датчиками, которые фиксируют попадание подвижного сочленения в каждое из допустимых положений (рисРис. 2. ). Таким образом, мы имеем 6 различных сигналов yij (по два с каждой степени подвижности) с соответствующих датчиков, где i = 1, 2, 3 – номер степени подвижности, j = 1, 2 – номер датчика на степени. Кроме того, на каждую из степеней подвижности могут быть поданы управляющие сигналы uij. Эти сигналы имеют следующий смысл: u11 – движение вверх, u12 – вниз, u21 – влево, u22 – вправо, u31 – назад (втягивание руки), u32 – вперед (выдвижение руки). При uij = 0 движение не происходит, при uij = 1 происходит движение в заданном направлении. Системы управления цикловых роботов содержат такие команды, хотя на самом деле полный набор команд таких систем существенно богаче, в частности, они могут иметь команды условных и безусловных переходов. Цикловой манипулятор можно описать как конечный автомат, интерпретируя управляющие сигналы как входной алфавит, показания датчиков – как выходной алфавит. Тогда соответствующие множества, входящие в описание
K = {U, X, Y, , },
где U – входной алфавит; X – множество состояний; Y – выходной алфавит; – функция перехода; – функция выхода, будут выглядеть следующим образом:
U = (u11, u12, u21, u22, u31, u32);
X = (x1, x2, x3, x4, x5, x6, x7, x8);
Y = ( y11, y12, y21, y22, y31, y32).
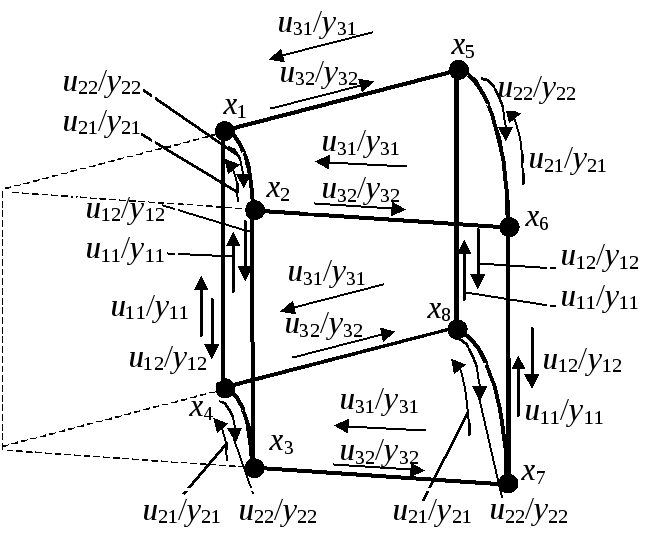
Область достижимости, состояния манипулятора и элементы входного и выходного алфавитов робота МП-9С.