

6_Dynamika tverdogo tila
.pdf233
6.6.1. Осі вільного обертання твердого тіла
Віссю вільного обертання твердого тіла або вільною віссю називають таку вісь, навколо якої можливе вільне (тобто без прикладання зовнішніх сил) обертання твердого тіла, при якому напрям осі залишається незмінним.
Покажемо, що вільні осі обертання проходять через центр мас тіла і що напрямки вільних осей обертання співпадають з напрямками головних осей тензора інерції.
Нехай деяке тверде тіло обертається з кутовою швидкістю навколо нерухомої осі, напрям
AA якої в просторі фіксований підшипниками A і A (Рис.6.12), причому центр мас тіла C не лежить на осі обертання.
Рівняння руху такого тіла можна записати у вигляді
зовн mRC F
dLdt M зовн ,
де, знову, відповідно до викладеного в 5.3.1, момент
зовнішніх сил M зовн подано формулою (6.51).
Необхідні умови вільного обертання є F зовн 0 та
|
|
|
|
|
|
|
|
|
M зовн |
0 . |
|
|
|
|
|
|
|
|
|
|
|
Рис. 6.12. |
|
|||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
У нашому прикладі F зовн mg |
R , |
де R - результуюча сил реакції, що діють на тіло через |
||||||
вісь з боку підшипників і які прикладені до неї в точках A і A . |
Легко бачити, що сила тяжіння |
|||||||
|
|
|
|
|
|
|
|
|
mg компенсується вертикальною складовою сил реакції |
Rверт . |
Тоді рівняння руху центру мас |
||||||
|
|
|
|
|
|
|
|
|
|
|
Rгор . |
|
|
|
|
|
|
можна |
записати у вигляді mRC |
Оскільки при |
обертанні навколо нерухомої осі у |
|||||
загальному випадку всі точки твердого тіла, що не лежать на осі обертання, рухаються по колу, то
|
|
|
|
2 |
|
|
|
|
|
|
|
|
RC |
|
де RC – |
||
по колу рухається й центр мас тіла, причому його лінійне прискорення є RC |
|
, |
||||||
вектор, початок якого лежить на осі обертання AA , |
а кінець – в центрі мас тіла |
C . Тоді |
||||||
|
|
|
|
|
|
|
|
|
рівняння руху центру мас набирає вигляду m 2 R |
R |
, звідки випливає, |
що |
R |
|
0 , а, |
||
C |
гор |
|
|
|
|
гор |
|
|

|
|
|
234 |
|
зовн 0 тоді і лише тоді, коли |
|
0 , тобто коли центр мас твердого тіла лежить на |
отже, і F |
R |
||
|
|
C |
|
осі обертання, або, іншими словами, вісь обертання проходить через центр мас твердого тіла.
Якщо центр мас твердого тіла лежить на осі обертання RC 0 , то другий доданок у правій
частині виразу для моменту зовнішніх сил (6.51) дорівнює нулю. Отже, тепер достатньо встановити за яких умов дорівнює нулю момент зовнішніх сил, визначений в системі центра мас
|
~ |
зовн . |
|
тіла, |
M |
Сумарний момент зовнішніх сил є сумою моментів зовнішніх сил |
|
|
прикладених до кожного елементарного об’єму тіла, що має масу |
dm і |
||||||||||||||
dF зовн dm 2r , |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
положення якого визначається радіус-вектором r , (Рис.6.12), |
|
||||||||||||||||
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
M зовн [r |
dF |
зовн ] [r ( dm 2r )] 2 [(r |
|
|
r ) r )]dm 2 [r r |
|
]dm , |
(6.57) |
|||||||||
|
|
||||||||||||||||
де інтегрування здійснюється по об’єму тіла, dm = (x, y, z)dV . |
|
||||||||||||||||
Введемо декартову систему координат з початком O на осі обертання і з віссю OZ AA . |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Тоді маємо r |
|
|
|
{0, 0, z} |
та r {x, y, 0} і |
|
|
|
|
||||||||
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
~ |
|
i |
j |
k |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|||||||||
M зовн 2 |
x |
y |
0 |
|
dm i |
2 yzdm j 2 xzdm . |
(6.58) |
||||||||||
|
|
|
|
|
|
0 |
0 |
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
Два доданки у правій частині одержаної рівності (6.58) містять вирази для неосьових |
|||||||||||||||||
моментів інерції |
I yz |
yzdm та Ixz |
xzdm , які, як відомо, обертаються на нуль, якщо головні |
||||||||||||||
осі тензора інерції твердого тіла співпадають з осями декартової системи координат, в якій їх
~
визначено. Отже M зовн 0 , тоді, коли обертання твердого тіла відбувається навколо однієї з головних осей тензора інерції. Таким чином, зроблене на початку параграфу твердження доведено.
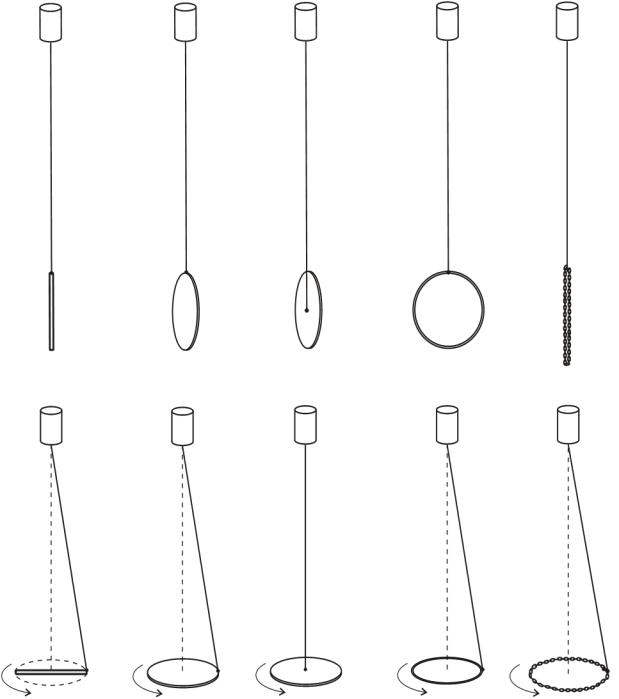
Воно підтверджується ефектними демонстраційними дослідами (Рис. 6.13), в яких тіла різної форми підвішують на нитці, верхній кінець якої прив’язано до вертикально розміщеної осі електродвигуна. Коли вісь не обертається, тіла знаходяться в положенні рівноваги: лінія підвісу проходить через центр мас тіла, а
орієнтація встановлюється така, щоб сумарний момент сил прикладених до тіла був рівний нулю. Зокрема,
сталевий стрижень, на одному з кінців якого закріплено нитку, займає вертикальне положення; плоскі круглі алюмінієві диски, підвішені в точках на краю та на половині радіуса, а також тонке жорстке кільце,
розміщуються у вертикальній площині; диск, підвішений за центр, перебуває у стані байдужої рівноваги, а
235
Рис. 6.13. Демонстрація осей вільного обертання
замкнений тонкий ланцюжок складається вдвоє і звисає у вертикальному напрямку. Коли вісь електродвигуна починає обертатися, вона створює механічний обертовий момент, що закручує нитку підвісу, а через цю нитку цей момент передається підвішеному на ній тілу й примушує його обертатися навколо вертикальної осі. При цьому центр мас тіла залишається на вертикалі, що проходить через точку закріплення нитки на осі електродвигуна, а при зростанні кутової швидкості тіло змінює свою просторову орієнтацію таким чином, щоб вісь обертання співпадала з головною віссю його тензора інерції, відносно якої момент інерції є найбільшим. При цьому сталевий стержень, алюмінієві диски і тонке кільце

236
обертаються в горизонтальній площині, а замкнений ланцюжок утворює кільце, яке також обертається в горизонтальній площині подібно до тонкого жорсткого кільця. Вісь обертання при цьому перпендикулярна площинам обертання цих тіл і завжди проходить через їх центр мас. Щодо нитки підвісу, то вона описує конус, вершина якого співпадає з точкою її закріплення на осі електродвигуна, а в основі лежить колова траєкторія, по якій рухається точка , в якій нитка прикріплена до тіла.
6.6. Динаміка плоского руху твердого тіла
Як було означено в Розділі 2 при плоскому русі твердого тіла кожна точка твердого тіла рухається в площині, паралельній деякій нерухомій площині, що перпендикулярна вектору кутової
швидкості . При цьому його центр мас, як і будь-яка його точка рухається по плоскій траєкторії,
площина якої перпендикулярна вектору кутової швидкості .
Отже динаміка плоского руху твердого тіла може бути описана рівнянням руху його центру мас
|
|
зовн |
|
|
|
F |
|
|
|
mRC |
|
, |
(6.59) |
та рівнянням обертового руху навколо осі, що проходить через центр мас, перпендикулярно до площини траєкторії
I |
C |
M зовн . |
(6.60) |
|
z |
|
|
При цьому треба пам’ятати (див.5.5), що при обчисленні моменту сил |
M zзовн необхідно |
||
брати до уваги лише сили взаємодії.
Приклад. Знайдемо прискорення круглого циліндра, що починає скочуватись без ковзання з
похилої площини (Рис.6.14). Радіус |
циліндра є R 0 , |
|
||||||
маса m , а момент інерції відносно осі IC . |
|
|||||||
До циліндра прикладені дві сили: сила тяжіння |
|
|||||||
|
|
|
C і |
сила реакції |
з |
боку похилої |
|
|
mg у центрі мас |
|
|||||||
|
|
|
|
|
|
|
||
площини R у точці дотику M . |
|
|
|
|||||
Рівняння руху центра мас циліндра: |
|
|
||||||
|
|
|
|
|
|
|
||
|
R . |
|
|
|
|
|||
mRC |
mg |
|
|
(6.61) |
|
|||
|
|
|
|
|
|
|
Рис. 6.14 |
|
Силу |
реакції |
R |
можна подати |
як суму її |
||||
|
||||||||
нормальної та тангенціальної складових
237
|
|
|
|
R N Fзч , |
(6.62) |
||
де Fзч тангенціальна складова, яку називають силою зчеплення поверхні циліндра з
похилою площиною, а N нормальна складова, яку іноді називають нормальною силою реакції.
|
|
|
|
Сумарний момент сил, визначений відносно центру мас, M C є |
|
||
|
|
|
|
MC [RCK |
Fзч ] , |
(6.63) |
|
|
радіус-вектор, початок якого лежить в центрі мас, а |
кінець у точці дотику K . |
|
де RCK |
|||
|
|
Оскільки лінії дії сили тяжіння mg і нормальної складової |
N сили реакції опори проходять |
через точку C , то їх момент відносно точки C дорівнює нулю. |
|
|||
Отже рівняння обертового руху циліндра можна записати так |
|
|||
|
|
|
|
|
IC [RCK |
Fзч ] , |
|
(6.64) |
|
|
|
|
|
|
де I C |
момент інерції циліндра відносно його осі, |
кутове прискорення циліндра. |
||
Запровадимо прямокутну декартову систему координат, вісь OX якої |
направлена вздовж |
|||
похилої площини, а вісь OY |
N . |
Після проектування рівнянь руху циліндра на осі цієї системи |
|
координат дістанемо |
|
||
|
|
|
|
mX C mg sin Fзч |
|
||
|
mg cos N |
(6.65) |
|
mYC |
|||
IC |
RCK Fзч . |
|
|
До системи рівнянь (6.65) необхідно додати умову наявності зв’язку (похилої площини), яка
обмежує рух, YC 0 , з якої випливає, що YC 0 і YC 0 , а також умову чистого кочення,
відповідно до якої швидкість точок циліндра, що дотикаються до похилої площини, відносно цієї площини дорівнює нулю [див. формулу (2.45) в Розділі 2]
|
|
|
|
VC |
[ RCK ] . |
(6.66) |
|
З врахуванням цих умов, а також |
того, що RCK R0 , для відшукання прискорення циліндра |
||
|
маємо систему з 4 рівнянь |
|
|
a X C |
|
||

238
(1) |
ma mg sin Fзч |
|
(2) |
0 mg cos N |
(6.67) |
(3) |
IC R0 Fзч |
|
(4) |
a R0 , |
|
яка містить 4 невідомих два прискорення a та |
і дві компоненти сили реакції: Fзч та N . |
||||
Якщо в рівняння (1) підставити Fзч з рівняння (3) та |
з рівняння (4), отримаємо рівняння, з |
||||
якого знайдемо прискорення a |
|
||||
a |
mg sin |
. |
(6.68) |
||
|
|||||
|
m |
IC |
|
|
|
R2 |
|
||||
|
|
|
|||
0 |
|
|
|
||
Корисно порівняти прискорення, з яким скочується циліндр по похилій площини, з
прискоренням, з яким він ковзає по цій самій площині (якщо його, наприклад, поставити на основу
і надати похилій площині достатній нахил, tg k ) (див. формулу (3.28) у параграфі 3.6).
Прискорення при поступальному русі тіла по похилій площині a g(sin k cos ) не залежить
від маси тіла, але залежить від величини сили тертя ковзання через коефіцієнт тертя ковзання k .
У той же час, прискорення, з яким скочується циліндр, не залежить від величини сили зчеплення
(вона просто повинна бути ненульовою, що створити момент відносно осі і спричинити обертовий рух циліндра), але залежить від маси циліндра і від його моменту інерції, причому збільшення моменту інерції зменшує прискорення. Для аналізу зручно подати прискорення циліндра у вигляді
a |
g sin |
. |
|
|
(6.69) |
|
||
|
|
|
|
|||||
1 |
IC |
|
|
|
|
|||
mR2 |
|
|
|
|
|
|
||
0 |
|
|
|
|
|
|
||
З цієї формули видно, що прискорення |
a залежить лише від кута нахилу площини |
та |
||||||
відношення моменту інерції циліндра I |
C |
до величини mR2 . Остання являє собою момент інерції |
||||||
|
|
|
|
|
|
0 |
|
|
тонкостінного циліндра, маса якого m зосереджена в тонкому циліндричному шарі на відстані |
R0 |
|||||||
від осі. Це максимально можливий момент інерції для циліндра: для всіх інших циліндрів IC mR02 .
Отже прискорення, з яким скочується циліндр, не може бути меншим за |
1 |
2 |
g sin ) . З іншого боку |
|
|
|

|
|
|
|
|
|
|
|
239 |
воно не може бути більше за g sin . Зокрема, для однорідного циліндра I |
|
1 |
2 |
mR2 |
і прискорення |
|||
|
|
|
|
C |
|
0 |
|
|
|
|
|
|
|
|
|
||
з яким він скочується є |
2 |
3 |
g sin . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Усе сказане |
підтверджується демонстраційним |
|
|
|
|
|
||
дослідом, в якому два циліндра однакових зовнішніх |
|
|
|
|
|
|||
розмірів і однакової маси починають скочуватись по похилій |
|
|
|
|
|
|||
площині. Єдина відмінність між циліндрами полягає в тому, |
|
|
|
|
|
|||
один з них є суцільний, |
виготовлений з дерева, а другий, |
|
|
|
α |
|
||
|
|
|
|
|
|
|
|
|
виготовлений з алюмінію, має циліндричну порожнину, так |
|
|
|
|
|
|||
|
|
|
Рис. 6.15. Скочування циліндрів. |
|||||
що його маса зосереджена на його периферії (Рис.6.15). При |
|
|
|
|
|
|||
однаковій масі циліндр з порожниною має більший момент інерції, а тому його прискорення у відповідності до формули (6.69)
є меншим і суцільний циліндр випереджає його.
Зауважимо, що нормальна складова сили реакції N однакова при скочуванні й при ковзанні циліндра, N mg cos . Цього не можна сказати про тангенціальну складову сили реакції, якою у
випадку ковзання тіла по похилій площині є сила тертя ковзання, модуль якої є |
F ковз |
kN , а при |
|
тертя |
|
скочуванні циліндра силою зчеплення Fзч є фактично сила тертя спокою, оскільки точки циліндра по
лінії дотику (точка M на Рис.6.14 є її проекцією) не ковзають по похилій площині, а нерухомі
відносно неї. Модуль цієї сили можна знайти з рівняння (1) після підстановки в нього |
прискорення |
|||||
a з (6.69): |
|
|
|
|
||
F |
|
mg sin |
. |
(6.70) |
||
|
||||||
зч |
|
1 |
mR2 |
|
||
|
|
0 |
|
|
|
|
|
|
IC |
|
|||
Оскільки сила тертя спокою не може перевищувати максимальне значення, що дорівнює силі
тертя ковзання Fзч kN , то з врахуванням рівностей (6.70) і рівняння (2) системи (6.67) цю умову
можна записати так
mg sin |
kmg cos , |
||
|
|
||
1 |
mR2 |
||
0 |
|
|
|
IC |
|
||
240
звідки
tg k(1 |
mR2 |
|
|
0 |
) , |
(6.71) |
|
|
|||
|
IC |
|
|
тобто чисте кочення циліндра може відбуватися лише при кутах нахилу площини менших, за деяке певне значення. При перевищенні цього значення циліндр буде здійснювати плоский рух з
ковзанням: обертання циліндра буде відбуватись під дією моменту сили тертя ковзання kmg cos , а
центр мас циліндра буде рухатись з прискоренням a g(sin k cos ) , тобто так само і брусок,
ковзання якого по похилій площині було розглянуто в параграфі 3.6 .
|
|
|
F |
F |
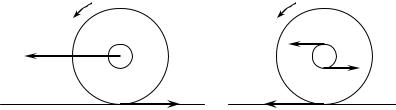
Практично важливими випадками плоского руху є рух коліс транспортних засобів. |
зч |
|
зч |
Варто вказати на такі особливості цих рухів. Колесо воза або автомобільного причепа обертається за
рахунок |
того, |
що |
при переміщенні |
|
|
|
|
|
|
його осі |
під |
дією прикладеної до |
|
а |
|
б |
|
||
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
F1 |
|
|
|
|
|
F |
|
|
|
|
неї сили |
F |
(Рис.6.1а), |
внаслідок |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
взаємодії |
|
ободу |
колеса з |
|
|
K |
|
F2 |
|
|
|
|
|
K |
|||||
|
|
|
|
|
|
|
|
|
|
поверхнею, |
на |
яку |
спирається |
|
|
|
F |
F |
|
|
|
|
зч |
зч |
|||||
|
|
|
|
|
|
Рис. 6.16. До визначення напрямку сили зчеплення. |
|||
колесо, виникає |
момент |
M сили |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
зчеплення (тертя) Fзч відносно осі, |
M |
[R0 |
Fзч ] , де |
R0 радіус-вектор, |
проведений від осі |
||||
обертання колеса до точки K його дотику до поверхні, |
яка прикладена в точці K і направлена |
||||||||
протилежно напряму руху осі колеса. Це можна пояснити таким чином. Нехай колесо, що може вільно обертатися навколо осі, спочатку рухається поступально поблизу опорної поверхні з деякою
швидкістю VO направленою на Рис.6.1а ліворуч. У момент дотику до опорної поверхні швидкість
|
|
|
|
|
|
|||
|
|
|
K |
|
||||
нижньої точки колеса |
|
V . |
Унаслідок цього виникає |
сила тертя ковзання F ковз |
kN |
|
, |
|
K |
|
|
||||||
|
O |
|
тертя |
|
K |
|||
|
|
|
|
|
|
|||
прикладена до колеса в точці K його дотику до поверхні, направлена протилежно напрямку руху осі |
||||||||
|
|
|
|
|
|
|
|
|
колеса VO . Момент цієї |
сили |
M спричинює обертання |
колеса, внаслідок чого зменшуються |
|||||
|
|
|
|
|
|
|
|
|
швидкість нижньої точки K колеса відносно поверхні, K , |
оскільки тепер вона, як було показано в |
|||||||
параграфі 2.2.5 (формула(2.44)) є сумою швидкості поступального руху осі колеса VO і лінійної

|
|
|
241 |
|
|
|
|
швидкості, яку має нижня точка ободу внаслідок обертання колеса навколо осі K |
VO |
[ R0 ] . |
|
У результаті через деякий час швидкість K зменшується до нуля і колесо переходить у режим
|
|
|
чистого кочення, при якому виконується умова VO |
[ R0 ] . При цьому ковзання припиняється, |
|
модуль сили тертя, яка відтепер є силою тертя спокою (силою зчеплення) Fзч , стає меншим за
модуль сили ковзання, але її напрям залишається незмінним і співпадає з напрямом поступального руху осі обертання.
На практиці саме це відбувається при посадці літака. При цьому в момент дотику колеса літака до поверхні бетону можна спостерігати інтенсивне утворення диму в точці дотику, яке має місце доти, поки має місце ковзання, а, отже, на колесо діє дисипативна сила тертя ковзання6. Подібна ситуація має місце для всіх ведених коліс транспортних засобів, зокрема для колеса воза або будь-якого іншого причіпного пристрою.
У випадку ведучих коліс, наприклад , автомобіля або велосипеда, колесо здійснює обертовий
|
|
|
|
|
|
|
|
|
|
радіус- |
рух за рахунок сумарного моменту пари сил F1 та |
F2 , |
M [r01 |
F1] [r02 |
F2 |
] , де |
r01 |
, r02 |
|||
вектори, проведені від осі обертання колеса до точок прикладання пари сил F1 та F2 . У цьому
випадку сила, яка рухає колесо (а разом з ним і транспортний засіб) у горизонтальному напрямку,
виникає внаслідок взаємодії обода колеса з поверхнею, на яку спирається колесо це сила
зчеплення (тертя) Fзч . Напрямок цієї сили можна встановити з таких міркувань. Уявимо, що спочатку
колесо обертається у вказаному на Рис.6.1б напрямку, але контакту з опорною поверхнею немає.
При цьому вектор швидкості K нижньої, найближчої до опорної поверхні, точки K обода колеса,
направлено праворуч. Після приведення колеса в контакт з поверхнею виникає сила тертя ковзання,
прикладена до ободу колеса в точці контакту K , яка, як завжди, направлена протилежно вектору
швидкості K , з якою нижня точка ободу колеса рухається відносно поверхні, тобто ліворуч на
Рис.6.16. Ця сила є єдиною силою, що спричинює прискорення колеса в горизонтальному напрямку.
(ліворуч на Рис.6.16). Виникнення швидкості осі колеса у зазначеному напрямку зменшує відносну
|
|
швидкість точки K |
обода K , оскільки тепер вона, як було показано в параграфі 2.2.5 |
6На важких літаках, щоб запобігти займанню та руйнуванню коліс, їх попередньо розкручують перед посадкою до такої кутової швидкості, при якій в момент дотику коліс до посадочної смуги виконується умова чистого кочення (див. Вправу
6._)
242
(формула(2.44)) є сумою швидкості поступального руху осі колеса VO і лінійної швидкості, яку має
|
|
|
|
|
|
нижня точка обода внаслідок обертання колеса навколо осі K |
VO |
[ R0 ] , де |
R0 |
радіус- |
|
вектор, проведений від осі обертання колеса до точки K його дотику з поверхнею.
У результаті через деякий час швидкість K зменшується до нуля і колесо переходить у
|
|
|
режим чистого кочення, при якому виконується умова VO |
[ R0 ] . При цьому ковзання |
|
припиняється, модуль сили тертя, яка відтепер є силою тертя спокою (силою зчеплення) Fзч , стає
меншим за модуль сили ковзання, але її напрям залишається незмінним і співпадає з напрямом поступального руху осі обертання. Підкреслимо, що в режимі чистого кочення сила тертя спокою
|
завжди є недисипативною силою7, оскільки її потужність |
|
|
|
(сила зчеплення) F |
N F |
|
K |
|
зч |
|
зч |
|
|
дорівнює нулю внаслідок того, що при чистому коченні K 0 .
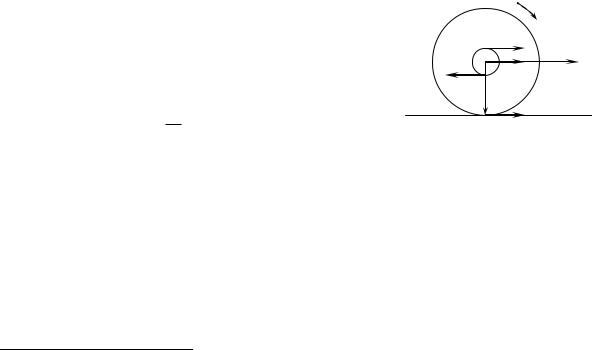
Трапляються випадки, коли неможливо наперед встановити напрям сили тертя (зчеплення)
Fзч при його чистому коченні по деякій поверхні з простих міркувань, як це було зроблено вище.
Прикладом може бути рух ведучого колеса автомобіля, який витягують зі снігу чи з болота за
допомогою троса ( F 0 ) при одночасному прикладанні до цього колеса обертового моменту з
|
|
|
|
|
|
|
|
|
|
боку двигуна |
|
(Рис.6.17). Тоді |
для знаходження Fзч |
||||||
необхідно розв’язати повну систему рівнянь |
|||||||||
|
|
|
|
|
зовн |
|
|
|
|
|
|
|
|
|
|
|
|||
|
mRC Fi |
|
|
|
|||||
|
|
i |
|
|
|
|
|
||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|||
|
|
зовн |
|
|
|
||||
|
IC |
M i |
|
|
|
|
(6.72) |
||
|
|
|
i |
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
RC |
[ RK ] |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F1 |
||
|
|
|
|
С |
|
|
VC |
RK |
|
||
F |
F |
|
|
|
|
|
|
2 |
K |
|
|
|
|
|
|
|
|
|
|
|
|
Fзч. |
? |
Рис. 6.17. До визначення напрямку сили зчеплення.
де RK |
є радіус-вектор, початок якого лежить на осі |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
обертання, а кінець в точці контакту K ; |
F |
зовн F |
F |
F |
F |
; |
|||||
|
|
|
|
|
|
i |
1 |
2 |
|
зч |
|
|
|
|
|
|
|
|
|
|
|
|
|
Miзовн [r01 |
F ] [r02 |
F ] [R0 Fзч ] |
|
|
|
|
|||||
i
7Це твердження справедливе для моделі абсолютно твердого тіла. При чистому коченні реальних тіл є втрати механічної енергії за рахунок непружних деформації колеса і опорної поверхні, а також за рахунок утворення і розривів молекулярних зв’язків при коченні.