

Федеральное агентство по образованию
Государственное образовательное учреждение высшего
профессионального образования
СИБИРСКИЙ ГОСУДАРСТВЕННЫЙ АЭРОКОСМИЧЕСКИЙ
УНИВЕРСИТЕТ ИМ. АКАДЕМИКА М.Ф. РЕШЕТНЁВА
Институт (факультет) аэрокосмический .
Кафедра ОКМ .
Специальность Менеджмент высоких технологий у
Группа Мт-91 .
Расчёт кривошипно-ползунного механизма
задание №8 вариант № 7 .
Руководитель
проекта (работы) _______________ доцент к.т.н. Л.Д.Антонова .
(подпись, дата) (ученое звание, степень, инициалы, фамилия)
Разработал студент _______________ С.А.Кораблев .
(подпись, дата) (инициалы, фамилия)
Красноярск 2011 г.
Содержание:
КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА. 3
Задание на курсовой проект. 3
Структурный анализ механизма. 3
План положений механизма. Построение графиков. 4
Построение плана скоростей. 4
Построение плана ускорений. 6
кинетостатический анализ рычажного механизма 7
Кинетостатический расчет группы звеньев 2 – 3. 8
Кинетостатический расчет ведущего звена. 9
Рычаг Н.Е. Жуковского. 9
синтез зубчатого механизма 11
Расчет планетарной передачи. 11
Расчет основных геометрических параметров зубчатой передачи. 12
Вычерчивание зубчатого зацепления. 13
Построение графиков движения толкателя. 14
библиографический список 15
Кинематический анализ механизма. Задание на курсовой проект.
В курсовом проекте необходимо рассчитать кривошипно-шатунный механизм по следующим исходным данным:
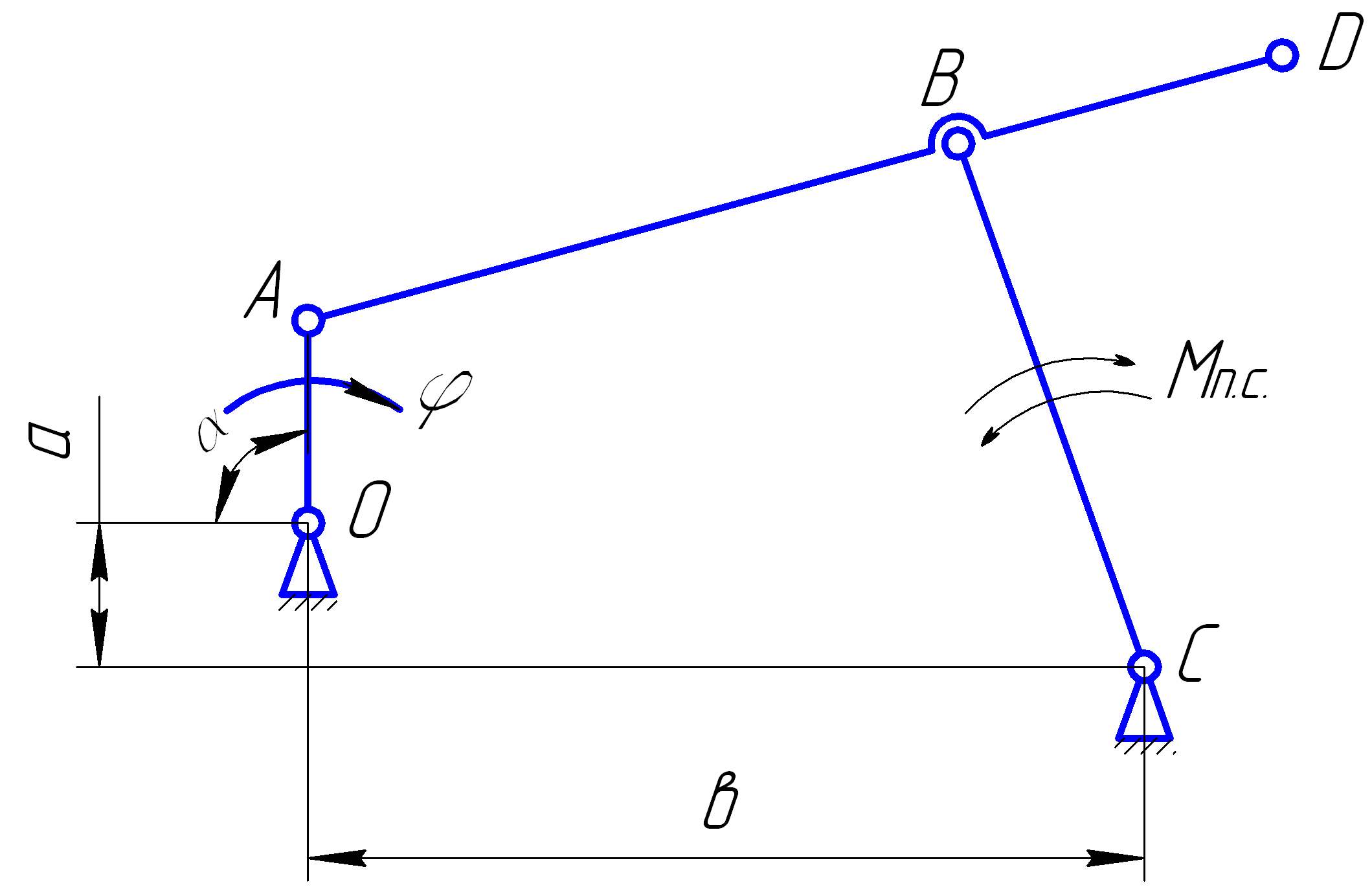
Рис. 1. Схема кривошипно-шатунного механизма.
Число оборотов пОА=120 об/мин
Длина кривошипа ОА=0,06м
Длина шатуна АВ=0,14 м
Длина ДВ=0,03 м
Длина СВ=0,20м
а=0,02 м
в=0,18м
Угол =60
Момент полезного сопротивления Мп.с.=60Н*м
Структурный анализ механизма.
Плоский кривошипно-шатунный механизм состоит из 3-х подвижных звеньев и 2-х неподвижных (стоек). Механизм имеет вращательные кинематические пары пары 5-го класса, где p5=3.Степень подвижности механизма определяем по формуле Чебышева:
![]()
где 3 – количество свободных движений отдельно взятого звена на плоскости;
n=3 – число подвижных звеньев;
2 – число условий связи (ограничений), накладываемых парами пятого класса;
р5 =3 – число пар пятого класса;
р4 =2 – число пар четвертого класса.
![]()
План положений механизма. Построение графиков.
В масштабе длин
![]() строим планы положений механизма для
двенадцати положений в предположении
того, что угловая скорость ведущего
звена (кривошипа ОА) постоянна (1=const).
Кривошип ОА изображаем в 12 положениях
через каждые 30,
начиная с положения, соответствующего
крайнему правому положению коромысла
СВ. Данное положение принимаем за начало
рабочего хода ведомого звена. Затем
изображаем все остальные звенья механизма
в положениях, соответствующих положениям
кривошипа.
строим планы положений механизма для
двенадцати положений в предположении
того, что угловая скорость ведущего
звена (кривошипа ОА) постоянна (1=const).
Кривошип ОА изображаем в 12 положениях
через каждые 30,
начиная с положения, соответствующего
крайнему правому положению коромысла
СВ. Данное положение принимаем за начало
рабочего хода ведомого звена. Затем
изображаем все остальные звенья механизма
в положениях, соответствующих положениям
кривошипа.
Строим график зависимости угла поворота коромысла, от угла поворота кривошипа. Определяем масштабы построений:
Масштаб для оси
угловых перемещений кривошипа:![]() .
.
![]() - т.к. при построение
диаграммы перемещений, масштаб построения
не изменился.
- т.к. при построение
диаграммы перемещений, масштаб построения
не изменился.
Определим
![]() :
:![]()
Определим
![]() :
:![]() мc-2/мм
мc-2/мм
Определим
![]() :
:![]() мc-2/мм
мc-2/мм
Построение плана скоростей.
Согласно заданию на курсовой проект, рабочим положением механизма будет положение 2.
Скорость точки.
А:
![]()
Из полюса Р откладываем отрезок Ра звену ОА направленный в сторону вращения кривошипа ОА (по касательной к траектории движения точки А) длиной 91 мм изображающий вектор скорости точки А.
Масштаб плана
скоростей:
![]()
Скорость точки В определяется системой уравнений:
![]()
![]()
Линии действия неизвестных скоростей известны, они будут перпендикулярны звеньям АВ и СВ соответственно. По этому данную систему уравнений можно решить графически.
Через конец вектора скорости точки А проводим линию действия вектора скорости VBА. Из полюса проводим линию действия вектора скорости VBС. Точка пересечения этих линий дают нам вектор скорости точки В. Измерив его длину и умножив на масштаб, получим скорость точки В:
![]() м/с.
м/с.
![]() м/с.
м/с.
Скорость точки D находим аналогично:
![]()
![]()
Точка d на плане скоростей будет лежать на продолжении отрезка аb. Длина отрезка аd на плане:
![]()
Соединив точку d с полюсом, найдем абсолютную скорость точки D.
![]() м/с.
м/с.
Найдем скорость VS2A:
![]()
Минимальная скорость первого звена:
![]()
![]()
![]()
Угловые скорости звеньев:
![]() ;
;
![]() ;
;
![]() ;
;