

ОПМ / ТММ
.doc
СОДЕРЖАНИЕ:
КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА. 2
Задание на курсовой проект. 2
Структурный анализ механизма. 2
План положений механизма. Построение графиков. 3
Построение плана скоростей. 3
Построение плана ускорений. 5
кинетостатический анализ рычажного механизма 6
Кинетостатический расчет группы звеньев 2 – 3. 7
Кинетостатический расчет ведущего звена. 8
Рычаг Н.Е. Жуковского. 8
Список Литературы 10
КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА.
Задание на курсовой проект.
В курсовом проекте необходимо рассчитать кривошипно-шатунный механизм по следующим исходным данным:
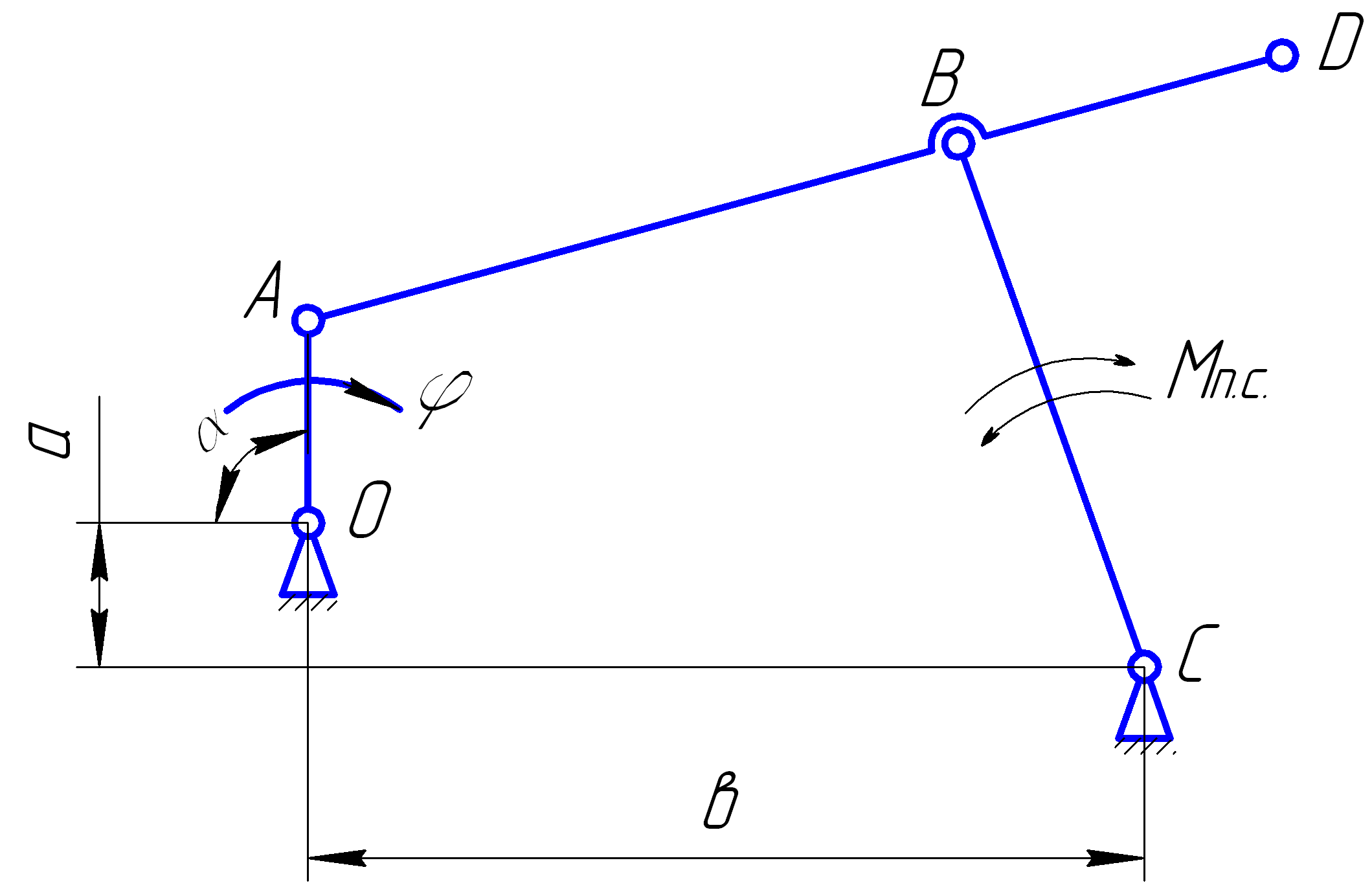
Рис. 1. Схема кривошипно-шатунного механизма.
Число оборотов пОА=120 об/мин
Длина кривошипа ОА=0,06м
Длина шатуна АВ=0,14 м
Длина ДВ=0,03 м
Длина СВ=0,20м
а=0,02 м
в=0,18м
Угол =60
Момент полезного сопротивления Мп.с.=60Н*м
Структурный анализ механизма.
Плоский кривошипно-шатунный механизм состоит из 3-х подвижных звеньев и 2-х неподвижных (стоек). Механизм имеет вращательные кинематические пары пары 5-го класса, где p5=3.Степень подвижности механизма определяем по формуле Чебышева:
![]()
где 3 – количество свободных движений отдельно взятого звена на плоскости;
n=3 – число подвижных звеньев;
2 – число условий связи (ограничений), накладываемых парами пятого класса;
р5 =3 – число пар пятого класса;
р4 =2 – число пар четвертого класса.
![]()
План положений механизма. Построение графиков.
В масштабе длин
![]() строим планы положений механизма для
двенадцати положений в предположении
того, что угловая скорость ведущего
звена (кривошипа ОА) постоянна (1=const).
Кривошип ОА изображаем в 12 положениях
через каждые 30,
начиная с положения, соответствующего
крайнему правому положению коромысла
СВ. Данное положение принимаем за начало
рабочего хода ведомого звена. Затем
изображаем все остальные звенья механизма
в положениях, соответствующих положениям
кривошипа.
строим планы положений механизма для
двенадцати положений в предположении
того, что угловая скорость ведущего
звена (кривошипа ОА) постоянна (1=const).
Кривошип ОА изображаем в 12 положениях
через каждые 30,
начиная с положения, соответствующего
крайнему правому положению коромысла
СВ. Данное положение принимаем за начало
рабочего хода ведомого звена. Затем
изображаем все остальные звенья механизма
в положениях, соответствующих положениям
кривошипа.
Строим график зависимости угла поворота коромысла, от угла поворота кривошипа. Определяем масштабы построений:
Масштаб для оси
угловых перемещений кривошипа:![]() .
.
![]() - т.к. при построение
диаграммы перемещений, масштаб построения
не изменился.
- т.к. при построение
диаграммы перемещений, масштаб построения
не изменился.
Определим
![]() :
:
![]()
Определим
![]() :
:
![]() мc-2/мм
мc-2/мм
Определим
![]() :
:
![]() мc-2/мм
мc-2/мм
Построение плана скоростей.
Скорость точки.
А:
![]()
Из полюса Р откладываем отрезок Ра звену ОА направленный в сторону вращения кривошипа ОА (по касательной к траектории движения точки А) длиной 50 мм изображающий вектор скорости точки А.
Масштаб плана
скоростей:
![]()
Скорость точки В определяется системой уравнений:
![]()
![]()
Линии действия неизвестных скоростей известны, они будут перпендикулярны звеньям АВ и СВ соответственно. По этому данную систему уравнений можно решить графически.
Через конец вектора скорости точки А проводим линию действия вектора скорости VBА. Из полюса проводим линию действия вектора скорости VBС. Точка пересечения этих линий дают нам вектор скорости точки В. Измерив его длину и умножив на масштаб, получим скорость точки В:
![]() м/с.
м/с.
![]() м/с.
м/с.
Скорость точки D находим аналогично:
![]()
![]()
Точка d на плане скоростей будет лежать на продолжении отрезка аb. Длина отрезка аd на плане:
![]()
Соединив точку d с полюсом, найдем абсолютную скорость точки D.
![]() м/с.
м/с.
Найдем скорость VS2A:
![]()
Минимальная скорость первого звена:
![]()
![]()
![]()
Угловые скорости звеньев:
![]() ;
;
![]() ;
;
![]() ;
;
-
Скорости точек в рабочем положении.
|
|
VA |
VB |
VD |
VS1 |
VS2 |
VS3 |
VВА |
VDA |
VS2А |
|
Длины отрезков плана скоростей, мм |
50 |
55 |
56 |
25 |
52 |
27,5 |
24 |
27,16 |
12,348 |
|
Скорости точек, м/с |
1,458 |
1,603 |
1,658 |
0,729 |
1,521 |
0,8 |
0,7 |
0,792 |
0,36 |
Построение плана ускорений.
Планы ускорений также строим для рабочего положения.
Ускорение точки А:
![]()
![]() ,
,
![]() ,
потому что
,
потому что
![]()
Из полюса
откладываем отрезок
![]() длиной 50 мм изображающий вектор ускорения
точки А.
Направление вектора от точки А к точке
О.
длиной 50 мм изображающий вектор ускорения
точки А.
Направление вектора от точки А к точке
О.
Масштаб плана
ускорений:
![]()
Для нахождения ускорения точки В составляем систему уравнений:
![]()
![]()
Зная угловые скорости, можем определить нормальные составляющие ускорений:
![]() ,
,
![]()
![]() ,
,![]()
Согласно векторным
уравнениям откладываем
![]() и
и
![]() и перпендикулярно к ним откладываем
векторы тангенциальных ускорений, точка
пересечения которых дает нам абсолютный
вектор ускорения точки В.
и перпендикулярно к ним откладываем
векторы тангенциальных ускорений, точка
пересечения которых дает нам абсолютный
вектор ускорения точки В.
![]() м/с2.
м/с2.
![]() ,
,
![]()
![]() ,
,![]()
Угловые ускорения звеньев.
![]() с-2;
с-2;
![]() с-2;
с-2;
-
Ускорения точек в рабочем положении.
|
|
aA |
aB |
anBA |
aBA |
anBС |
aBС |
as1 |
as2 |
as3 |
|
Длины отрезков плана ускорений, мм |
50 |
22 |
4,879 |
4,879 |
20 |
4 |
25 |
23 |
11 |
|
Ускорения точек, м/с2 |
17,706 |
7,791 |
1,728 |
11,686 |
7,114 |
1,417 |
8,853 |
8,145 |
3,895 |
Ускорения центров масс звеньев.
![]() м/с2;
м/с2;
![]() м/с2;
м/с2;
![]() м/с2;
м/с2;
кинетостатический анализ рычажного механизма
Для кинетостатического расчета определяем все активные силы:
Принимаем удельную
массу одного метра звена
![]() .
.
Массы звеньев
![]() кг.
кг.
Масса
1-го звена
![]() кг;
кг;
Масса
2-го звена
![]() кг;
кг;
Масса
3-го звена
![]() кг;
кг;
Силы тяжести ![]() Н.
Н.
Сила
тяжести 1-го звена
![]() Н;
Н;
Сила
тяжести 2-го звена
![]() Н;
Н;
Сила
тяжести 3-го звена
![]() Н;
Н;
Силы инерции ![]() Н,
Н,
Сила
инерции 1-го звена
![]() Н;
Н;
Сила
инерции 2-го звена
![]() Н;
Н;
Сила
инерции 3-го звена
![]() Н;
Н;
Моменты сил инерции
![]() Нм,
Нм,
Момент
силы инерции 2-го звена
![]() Нм;
Нм;
Момент
силы инерции 3-го звена
![]() Нм;
Нм;
Момент полезного сопротивления МП.с.=60 Н/м.
Кинетостатический расчет группы звеньев 2 – 3.
Строим
группы Асура 2 и 3 звеньев в масштабе
![]() ,
в соответствующих точках прикладываем
все активные силы: силы тяжести, силы
инерции, моменты сил инерции. Также
прикладываем реакции R0,3
и R1,2,
которые требуется определить. Определяем
плечи действия активных сил относительно
точки В:
,
в соответствующих точках прикладываем
все активные силы: силы тяжести, силы
инерции, моменты сил инерции. Также
прикладываем реакции R0,3
и R1,2,
которые требуется определить. Определяем
плечи действия активных сил относительно
точки В:
![]() м;
м;
![]() м;
м;
![]() м;
м;
![]() м;
м;
Составляем уравнения моментов всех сил действующих на 3 звено относительно точки В:
![]() ;
;
![]() ;
;

Составляем уравнения моментов всех сил действующих на 2 звено относительно точки В:
![]() ;
;
![]()

Составляем векторное уравнение равновесия всех сил, действующих на группу звеньев 2-3:
![]()
![]() ;
;
![]()
В
выбранном масштабе сил
![]() строим план сил, указанных в уравнении.
Из плана сил определяем
строим план сил, указанных в уравнении.
Из плана сил определяем
![]() и
и
![]() :
:
![]()
![]() H;
H;
![]() H.
H.
Исходя из суммы векторов нормальной и тангенциальной реакции опоры находим значения сил R0,3 и R1,2:
![]() H;
H;
![]() H.
H.
Кинетостатический расчет ведущего звена.
Строим
ведущее звено в масштабе
![]() ,
в соответствующих точках прикладываем
все активные силы: силы тяжести, силы
инерции, моменты сил инерции и реакцию
опоры R2,1.
Также прикладываем реакцию R0,1,
которую требуется определить. Реакция
R2,1
приложена в точке А и равна по величине
реакции R1,2,
но противоположна ей по направлению.
Прикладываем уравновешивающую силу
перпендикулярно звену ОА в точке А.
,
в соответствующих точках прикладываем
все активные силы: силы тяжести, силы
инерции, моменты сил инерции и реакцию
опоры R2,1.
Также прикладываем реакцию R0,1,
которую требуется определить. Реакция
R2,1
приложена в точке А и равна по величине
реакции R1,2,
но противоположна ей по направлению.
Прикладываем уравновешивающую силу
перпендикулярно звену ОА в точке А.
Определяем плечи действия этих сил:
![]() м.
м.
![]() м.
м.
Составляем уравнения моментов всех сил действующих на 1 звено относительно точки О:
![]() ;
;
![]() ;
;
![]() Н.
Н.
Остальные силы момента относительно точки О момента не создают, т.к. действуют в той же плоскости, в которой находится само звено.
Составляем векторное уравнение равновесия всех сил, действующих на ведущее звено:
В
выбранном масштабе сил
![]() строим план сил.
строим план сил.
![]()
Рычаг Н.Е. Жуковского.
Условная уравновешивающая сила определяется методом рычага Жуковского. Для того чтобы построить рычаг Жуковского, поворачиваем план скоростей в любую сторону на 90 и параллельно перенося, наносим все активные силы, действующие на механизм в соответствующих точках. При переносе моментов сил инерции, определяем их величину для плана скоростей из отношений:
![]() ,
,
Где:
ab, оb, cb – масштабные отрезки на плане скоростей, мм;
![]() – длины звеньев,
м.
– длины звеньев,
м.
![]() Нмм;
Нмм;
![]() Нмм;
Нмм;
![]()
![]() Нмм.
Нмм.
Плечи действия сил на рычаге Жуковского:
Н1=6 мм; Н2=26 мм; Н3=31 мм; Н4=16 мм; Н5=24 мм; Н6=39 мм; Н7=51 мм;
Составляем уравнения равновесия в форме моментов сил относительно полюса плана скоростей и определяем условную уравновешивающую силу РУр:
![]() .
.
![]()

![]()
![]() .
.
Погрешность незначительна, на основании чего можно сделать вывод, что расчеты произведены, верно. За расчетное значение уравновешивающей силы принимаем большее из полученных значений.
Список Литературы
-
Артоболевский И.И. Теория механизмов и машин: Учеб. для втузов.– 4-е изд., перераб. И доп.–М.: Наука. Гл. ред. физ-мат. лит., 1988. – 640 с..
-
А.С. Кореняко, Л.И. Кременштейн. Курсовое проектирование по теории механизмов и механике машин: Учеб. пособие для студентов технических вузов/Под ред. А.С. Кореняко, 5-е изд., перераб. – Киев: «Вища шк».,1970, 332с.
-
С.А. Попов, Г.А. Тимофеев. Курсовое проектирование по теории механизмов и механике машин: Учебое пособие для втузов/Под ред. К.В. Фролова.–3-е изд., стер. – М.: Высш. шк.,1999.
