

Сила тяги реактивного (ракетного) двигателя
Тяга – равнодействующая всех реактивных сил, создаваемых агрегатами двигателя, определяется по формуле:

где
 – массовый секундный расход топлива
реактивного двигателя;Wa
– скорость газовой струи на срезе сопла;
Fa
– площадь среза сопла; ра
– давление на срезе сопла; рh
– давление
окружающей среды.
– массовый секундный расход топлива
реактивного двигателя;Wa
– скорость газовой струи на срезе сопла;
Fa
– площадь среза сопла; ра
– давление на срезе сопла; рh
– давление
окружающей среды.
Первый член данного уравнения характеризует тягу, создаваемую за счет отбрасывания от сопла газов и эта часть – реактивная сила (статическая составляющая).
Второй член характеризует тягу, которая определяется разностью давлений на срезе сопла и давления окружающей среды и эта часть – переменная составляющая реактивной тяги (зависит от высоты полета).
Реактивный момент
Пусть
есть ракета с однокамерной двигательной
установкой (ДУ) рис.29: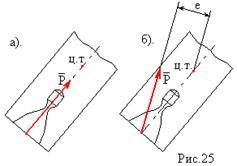
а) Если вектор тяги двигателя Р направлена вдоль оси, то реактивный момент отсутствует (рис. 29,а).
б) Если
вектор тяги (и результирующий вектор
тяги для многокамерной ДУ) действует с
некоторым эксцентриситетом относительно
центра тяжести (рис. 29,б),
то в этом случае действует реактивный
момент
 .
.
Рис.29
Аэродинамические схемы ла
Планером называется конструкция, объединяющая корпус, крылья, органы управления и стабилизации в единую аэродинамическую схему. Он предназначен для создания управляющих сил и размещения всей аппаратуры ракеты. Корпус планера обычно цилиндрической формы, за исключением ракеты типа «несущий конус», с конической (сферической) головной частью. Форма корпуса и головной части выбирается в целях получения наименьшей силы лобового сопротивления ракеты при полете. Материалом для корпуса служат легкие прочные металлы и сплавы
Аэродинамические поверхности планера служат для создания подъемной и управляющих сил. Подъемная сила, которая возникает при взаимодействии ракеты с воздухом во время ее полета, обеспечивает удержание ЛА в воздухе. Управляющие силы необходимы для изменения направления полета ракеты.
Различают подвижные и неподвижные аэродинамические поверхности (АП). Подвижные АП, предназначенные для управления полетом и стабилизацией ЛА, называются рулями, поворотными крыльями. Свои функции они выполняют путем поворота вокруг осей, перпендикулярных продольной оси корпуса ракеты, либо при выдвижении из корпуса на определенное время и в определенной последовательности.
Неподвижные АП служат для стабилизации полета ЛА (стабилизаторы) и для создания подъемной силы (несущие крылья, поверхности). По взаимному расположению рулей и неподвижных аэродинамических поверхностей можно выделить следующие аэродинамические схемы ракет (рис.30):
- нормальная или обычная;
- «утка»;
- «бесхвостка»;
- «поворотное крыло»;
В нормальной схеме рули и стабилизатор располагаются позади крыльев в хвостовой части ракеты.
Схема «бесхвостка». Данная схема является разновидностью нормальной схемы. Здесь крылья выполняют одновременно функции крыльев и стабилизаторов и отличаются большей стреловидностью и малым размахом. С целью увеличения подъемной силы в этой схеме увеличена площадь крыльев. При этом рули оказываются расположенными непосредственно за крыльями и связываются с ними конструктивно.
В
аэродинамической схеме «утка» рули
находятся в головной части ракеты
(впереди центра масс), а крылья, выполняющие
и функцию стабилизатора, расположены
в хвостовой части корпуса ракеты. Эта
схема удобна с точки зрения компоновки
ракеты, так как рулевые машинки могут
быть расположены близко к рулям. При
такой компоновке ракеты подъемная сила
рулей совпадает по направлению с
подъемной силой крыльев и корпуса.
Однако расположение рулей в носовой
части ракеты и возникновение скоса
воздушного потока при отклонении рулей
приводит к потере подъемной силы на
крыльях и возникновению значительных
моментов крена. Чтобы избежать «момента
косой обдувки» крыльевой блок делается
вращающимся вокруг оси ракеты, что
позволяет избежать воздействия скоса
воздушного потока на них.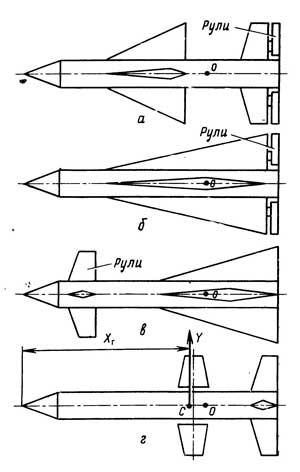
В схеме «поворотное крыло» подвижные поверхности (поворотные крылья) располагаются в районе центра тяжести и наряду с функцией крыла выполняют функцию рулей, а неподвижные стабилизаторы расположены в хвостовой части корпуса.
Рис. 30 Аэродинамические схемы: а)Нормальная; б)"Бесхвостка"; в)"Утка"; г)"Поворотное крыло".
Принципиально не существует наилучшей аэродинамической схемы. Выбор схемы аэродинамической компоновки определяется требуемыми высотами и дальностями полета ракеты, маневренностью и составом бортовой аппаратуры.
Таблица