

713
.pdf2. Переходное движение( |
). |
В этом случае формулы (2.10)-(2.14) приобретают вид
(2.45)
|
(2.46) |
(2.47) |
|
(2.48) |
|
, |
(2.49) |
где  определяется из соотношения
определяется из соотношения
 .(2.50)
.(2.50)
Формулы (2.35) - (2.37) перепишутся аналогичным образом.
Особое значение при рассмотрении поворота автопоезда имеет максимальный сдвиг с места, т.е. при .При этом
.
В частности, из последней формулы следует, что максимальный из всех возможных сдвигов будет сдвиг при  т.е. когда база
т.е. когда база
тягача перпендикулярна линии, на которой расположены продольные оси прицепных звеньев
 .
.
3. Круговое движение .
.
Стадия кругового движения для направляющего звена автопоезда характеризуется следующими соотношениями:
,
,
, |
. |
Для i-того звена справедливы соотношения (2.13) – (2.14), (2.33) – (2.37). Параметры, определяемые из этих соотношений, описывают переходные процессы, происходящие при движении прицепных звеньев за
78

автомобилем – тягачом, движущимся по круговой траектории. С течением времени относительные перемещения прицепных звеньев все более затухают. Если все  , то автопоезд движется как единое целое
, то автопоезд движется как единое целое
вокруг общего центра вращения. Однако это ―предельное‖ положение автопоезда на повороте теоретически достижимо лишь при t→ . Практически же вращение вокруг единого центра начинается уже с некоторого конечного момента времени
. Практически же вращение вокруг единого центра начинается уже с некоторого конечного момента времени , за которое автомобиль совершает поворот на уголφ(
, за которое автомобиль совершает поворот на уголφ( ).Этот момент времени зависит от
).Этот момент времени зависит от
конструкции автопоезда и кинематических параметров.Так для двухзвенного автопоезда таким углом практически является угол 2700 – 3000 [51]. Оставляя в стороне вопросы, связанные с исследованием переходных процессов, будем считать, что автопоезд движется в
стационарном круговом режиме, т.е. все  . В этом
. В этом
случае основные траектории прицепных звеньев представляют собой систему концентрических окружностей (рис. 2.16 – 2.18).
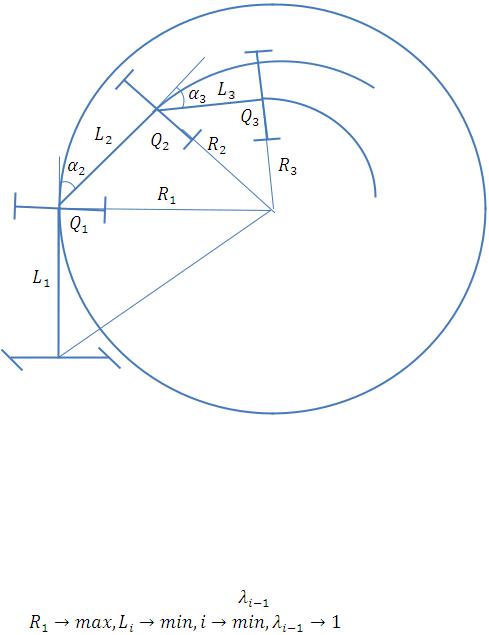
Основными параметрами, характеризующими стационарное круговое движение автопоезда, являются: -координаты центра поворота автопоезда;
-координаты центра поворота автопоезда; радиусы основных траекторий – окружностей, описываемых серединами осей ЭКЗ,
радиусы основных траекторий – окружностей, описываемых серединами осей ЭКЗ, - смещение основной траекторииi –
- смещение основной траекторииi –
того звена от основной траектории направляющего звена, углы складывания , а также текущие значения курсовых углов звеньев автопоезда и координатных точек
, а также текущие значения курсовых углов звеньев автопоезда и координатных точек .Перечисленные параметры при этом определяются следующим образом:
.Перечисленные параметры при этом определяются следующим образом:
(2.51)
(2.52)  .
.
Из условий осуществимости кругового движения(2.52) следует, что для некоторого фиксированного
при
при
при
79

В частности, если для произвольного |
выполняется |
|
условие |
, то с возрастанием номера звена iрадиусы |
все более |
уменьшаются, а |
все более увеличиваются (рис. 2.16): |
|
|
. |
|
Если |
, то все звенья движутся по |
окружности |
радиуса (рис. 2.17): |
|
|
 .
.
При условии ,звенья с возрастающими номерами движутся по окружностям все большего радиуса (рис. 2.18):
,звенья с возрастающими номерами движутся по окружностям все большего радиуса (рис. 2.18):
 .
.
Если все  , то основные траектории звеньев автопоезда
, то основные траектории звеньев автопоезда
представляют собой систему вложенных концентрических окружностей со все уменьшающимся (при увеличении номера i) радиусом (рис. 2.19).
Следовательно, при  и
и  основные траектории звеньев представляют систему вложенных друг в друга концентрических окружностей. Из равенства
основные траектории звеньев представляют систему вложенных друг в друга концентрических окружностей. Из равенства следует соотношение
следует соотношение
|
|
, |
(2.53) |
|
|
|
определяющее |
критические |
значения |
величин |
, то |
есть |
|
такиезначения |
, |
при |
которых |
обращается |
в нуль. |
Для |
определения критического значения одной из указанных величин нужно разрешить равенство(2.53) относительно этой величины. Так, например, для автопоезда, состоящего из N звеньев, базы которых равны
и выносы точек сцепок равны |
критическое значение радиуса |
||
поворота автомобиля-тягача равно |
|
. |
|
. |
|
|
|
. |
. . . |
|
|
. |
.. |
||
. |
.80 |
||
|
|||
|
C |
|
|
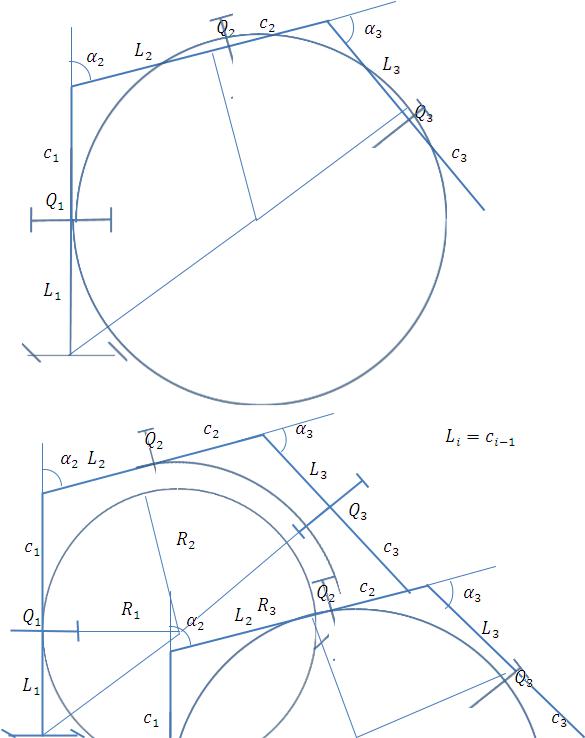
Рис. 2.16. Круговое установившееся движение автопоезда ( )
)
|
|
|
. |
|
|
. |
|
. |
|
|
|
|
. |
||
|
R |
|
|
||||
|
|
|
|
|
|||
|
|
|
|
|
|
||
. |
R |
. |
|
R |
. |
||
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
. |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
. |
|
|
|
|
|
. |
|
|
Рис. 2.17.Круговое установившееся движение автопоезда ( |
) |
||||||
. |
. |
|
|
. |
|
||
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
. |
|
. |
. |
... |
|
|
|
|
|
|
|
||
|
|
|
.. C |
81 |
. |
. |
|
|
|
|
|||||
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
.
Рис. 2.18.Круговое установившееся движение автопоезда ( )
)
. |
. |
. |
|
|
. |
. |
|
. |
. |
C |
|
|
|
Рис. 2.19.Круговое установившееся движение автопоезда ( )
)
Из условия (2.53)следует, что на возможность получения наилучшей вписываемости звеньев автопоезда в круговые траектории и уменьшения сдвигов траекторий  положительное влияние оказывают такие факторы,
положительное влияние оказывают такие факторы,
как:увеличение радиуса поворота автомобиля-тягача, уменьшение числазвеньев, укорочениедлин баз звеньев, приближение значения
конструктивного коэффициента |
к единице: |
|
. |
82

Последнее требование противоречит условию
противоречит условию
обеспечивающему наилучшую вписываемость в габаритные коридоры и устойчивость на стадии прямолинейного движения. Возможность решением указанного противоречия наряду с другими мероприятиями (управляемость колѐс прицепных звеньев,‖компромиссное‖ значение параметра  и т.д.) могла бы быть разработка
и т.д.) могла бы быть разработка
конструкцией автопоездов с изменяемой (управляемой) в ходе движения геометрией, в частности, с переменной длиной выноса сцепки. При прямолинейном движении автопоезда вынос точки сцепки должен быть равен нулю на переходной стадии движения
на переходной стадии движения  должен увеличиваться, на круговой стадии достигать своего максимального значения
должен увеличиваться, на круговой стадии достигать своего максимального значения
Таким образом, исследованы стадии прямолинейного, переходного и кругового движения. Получены формулы, позволяющие производить расчѐт основных характеристик, определяющих маневренные свойства и устойчивость движения автопоезда.
Следовательно, если вычислены значения параметров для каждой стадии движения, то последовательной стыковой этих параметров соответственно формуле (2.15) можно построить полную картину движения автопоезда.
ПустьP(t) - текущее значение некоторого параметра, определѐнного по вышеприведѐнным формулам. Тогда на основании известных на каждом j-том временном участке функций можно построить общее решение, имеющее вид:
можно построить общее решение, имеющее вид:
к которому добавлены условия стыковки решений .
Следовательно, задача построения траекторий автопоезда, его габаритных полос, оценки маневренных свойств и вписываемости автопоезда принципиально решена, так как имеются расчетные формулы и алгоритм, определяющий последовательность их применения.
Для реализации решения такой задачи был разработан программный комплекс АР расчета в системе Mathematicaна персональном компьютерекинематических параметров многозвенного автопоезда, использующий вышеприведенные формулы и алгоритмы их применения.
2.8. Экспериментальная проверка методики расчета кинематических параметров многозвенного автопоезда.
При построении опытного образца трехзвенного автопоезда в составе автомобиля-тягача МАЗ-5549 и двух двухосных прицепов Т-325Т были проведены исследования с целью обеспечения заданных маневровых свойств автопоезда. Основные конструктивные и размерные параметры автопоезда приведены в табл.2.2, 2.3.
83
Таблица 2.2
Основные параметры автомобиля – тягача МАЗ-5549
№ |
Параметр |
Значение |
Размерность |
|
Обозначение |
|
1 |
|
3,40 |
м |
База |
(расстояние |
между |
|
|
передней и задней осями) |
|
|||
|
|
|
|
|
||
2 |
|
0,97 |
м |
Вынос точки сцепки |
|
|
|
|
|
|
|
||
3 |
|
1,98 |
м |
Колесная колея передней оси |
||
|
|
|
|
|
||
4 |
|
1,80 |
м |
Колесная колея задней оси |
||
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 2.3 |
|
|
|
Основные параметры прицепа Т – 325А |
|
|||
|
|
|
|
|
|
|
№ |
Параметр |
Значение |
Размерность |
|
Обозначение |
|
1 |
|
2,50 |
м |
База прицепа |
|
|
|
|
|
|
|
|
|
2 |
|
1,15 |
м |
Вынос точки сцепки |
|
|
|
|
|
|
|
||
3 |
|
1,95 |
м |
Колесная колея передней оси |
||
|
|
|
|
|
||
4 |
|
1,80 |
м |
Колесная колея задней оси |
||
|
|
|
|
|
||
5 |
|
2,78 |
м |
Расстояние от точки сцепки до |
||
|
1-й оси прицепа |
|
||||
|
|
|
|
|
||
Проверка достоверности разработанного метода осуществлялась путем сопоставления расчетных и экспериментальных траекторий и габаритных полос, полученных для исследуемого автопоезда, совершающего поворот на 900 и 1800 со скоростью5 км/ч (1,4 м/с), при средней скорости поворота управляемых колес равной 0,1 рад/с, минимальном радиусе поворота автомобиля, равном 8м.
На основании численных расчетов на персональном компьютере были построены основные траектории автомобиля тягача и четырехприцепных элементарных кинематических звеньев(при расчетах каждый прицеп был представлен двумя ЭКЗ) и габаритные полосы автопоезда, совершавшего повороты на 900и 1800 (рис. 2.20, 2.21, 2.22, 2.23). Наименьший радиус кривизны имеет траектория пятого ЭКЗ. При повороте на 900 его величина составила 5,2м, на 1800 – 4,8 м.Максимальный сдвиг траекториипятогоЭКЗ от основной траектории автомобиля-тягача составил при повороте на 900 1,8 м, на 1800–2,3м. При проведении экспериментальных исследований на автополигоне НАМИ с помощью комплекса измерительно-регистрационной аппаратуры производилась запись угла поворота управляемых колес, курсового угла автомобиля тягача, углов складывания всех элементарных кинетических звеньев и скорости движения. Повороты автопоезда на 900 и 1800
84
выполнялись с учетом использованных при расчетном определении траектории значений соответствующих параметров, а именно средняя скорость поворота управляемых колес автомобиля-тягача составляла 0,1 рад/с, а скорость движения – 5 км/ч. Примененная методика эксперимента позволяет считать, что основная траектория автомобиля-тягача в процессе поворота соответствовала расчетной. Наибольший сдвиг от основной траектории автомобиля-тягача имеет траектория последнего элементарного кинематического звена (середина неуправляемой оси
(середина неуправляемой оси
второго прицепа автопоезда), поэтому сопоставление сдвигов расчетных траекторий произведено именно для этого звена. Сопоставление экспериментальных и расчетных траекторий показывает, что расчетная основная траектория последнего ЭКЗ автопоезда смещена ближе к центру поворота, чем траектория, полученная экспериментальным путем,расчетный сдвиг основной траектории последнего элементарного кинематического звена по отношению к основной траектории автомобиля
–тягача  больше, чем полученный экспериментально
больше, чем полученный экспериментально  примерно на
примерно на
200 мм при повороте на 900 (рис. 2.20) и 340 мм при повороте на 1800 (рис.
2.21).
Полученные расхождения расчѐтных и экспериментальных траекторий движения звеньев автопоезда объясняются сделанным при математическом моделировании допущении о боковой жесткости шин. Более точный расчѐт положения звеньев многозвенного автопоезда возможен при использовании математической модели, учитывающей влияние явления бокового увода эластичных шин.
Однако, учитывая достаточную малость абсолютных значений разницы в сдвиге траекторий ψ=90 = 200 мм,
ψ=90 = 200 мм,  ψ=180
ψ=180
=340 мм),можно считать, что рассмотренный метод расчѐта с применением персонального компьютера положения звеньев многозвенного автопоезда, совершающего маневры на опорной плоскости, является достаточно точным для практических расчѐтов показателей маневренности многозвенных автопоездов.
85

20
15
10
5
5Г
1
1Г
0
5 |
0 |
5 |
10 |
15 |
Рис. 2.20. Основная траектория автомобиля-тягача (1) и габаритная полоса движения автопоезда, совершавшего поворот влево на
(1Г- внешняя габаритная траектория – траектория правого переднего колеса автомобиля-тягача, 5Г- внутренняя габаритная траектория – траектория левого заднего колеса второго прицепа)
86

8 |
|
|
|
|
|
|
|
5 |
|
6 |
|
|
5Э |
|
|
|
|
|
|
|
|
4 |
|
|
|
|
δ1,5 |
|
|
4 |
|
|
|
|
|
|
|
Р |
|
|
|
|
1,5 |
|
|
|
|
Э |
|
|
|
|
1,5 |
|
2 |
|
|
3 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
1 |
|
|
0 |
|
|
|
|
6 |
8 |
10 |
12 |
14 |
Рис. 2.21. Поворот влево на . 1 – траектория середины задней оси автомобиля, 2 – траектория середины передней оси первого прицепа, 3 – траектория середины задней оси первого прицепа, 4 – траектория середины передней оси второго прицепа, 5 – траектория середины задней оси второго прицепа при движении автопоезда, совершавшего поворот влево на
. 1 – траектория середины задней оси автомобиля, 2 – траектория середины передней оси первого прицепа, 3 – траектория середины задней оси первого прицепа, 4 – траектория середины передней оси второго прицепа, 5 – траектория середины задней оси второго прицепа при движении автопоезда, совершавшего поворот влево на ;5Э– траектория середины задней оси второго прицепа, полученная
;5Э– траектория середины задней оси второго прицепа, полученная
экспериментально; - расчетный сдвиг основной траекториипятого
- расчетный сдвиг основной траекториипятого
элементарного кинематического звена по отношению к основной траектории автомобиля-тягача; - сдвиг основной траекториизадней оси
- сдвиг основной траекториизадней оси
второго прицепа по отношению к основной траектории автомобиля-тягача,
87