

713
.pdf21

|
|
|
|
|
|
|
Табл. 1.3. |
№ |
ТЗ |
Ос- |
Характеристика колес, осей, |
Структурная |
|||
|
автопоезда |
ность |
сопряжений ЭКЗ ТЗ |
формула ТЗ |
|||
1 |
2 |
3 |
|
4 |
|
|
5 |
|
|
|
С передним управляемыми, |
|
|||
1 |
автомобиль |
2 |
задними неуправляемыми |
|
|||
|
|
|
колесами |
|
|
|
|
2 |
автомобиль |
2 |
Со всеми управляемыми |
|
|||
колесами |
|
|
|
||||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
С передними |
|
|
|
|
3 |
автомобиль |
3 |
управляемыми средними и |
|
|||
задними неуправляемыми |
|
||||||
|
|
|
|
||||
|
|
|
колесами |
|
|
|
|
|
|
|
С |
передними |
и |
задними |
|
4 |
автомобиль |
3 |
управляемыми, |
|
средними |
|
|
|
|
|
неуправляемыми |
|
|
||
|
|
|
С |
передними |
и |
средними |
|
5 |
автомобиль |
3 |
управляемыми, |
|
задними |
|
|
|
|
|
неуправляемыми |
|
|
||
|
|
|
С управляемыми колесами |
|
|||
6 |
автомобиль |
4 |
1-й и 2-й передних осей и |
|
|||
неуправляемыми |
колесами |
|
|||||
|
|
|
|
||||
|
|
|
3-й и 4-й осей |
|
|
|
|
|
|
|
С |
передними |
и |
задними |
|
7 |
автомобиль |
4 |
управляемыми, |
|
средними |
|
|
|
|
|
неуправляемыми колесами |
|
|||
8 |
автомобиль |
4 |
Со всеми управляемыми |
|
|||
колесами |
|
|
|
||||
|
|
|
|
|
|
||
|
|
|
|
|
|||
9 |
прицеп |
1 |
Прицеп, роспуск без груза |
|
|||
(роспуск) |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
10 |
прицеп |
1 |
Роспуск с крестовой |
|
|||
(роспуск) |
сцепкой без груза |
|
|
||||
|
|
|
|
||||
11 |
прицеп |
2 |
Роспуск без груза |
|
|
||
(роспуск) |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
12 |
прицеп |
2 |
Прицеп с передней |
|
|||
(роспуск) |
поворотной осью |
|
|
||||
|
|
|
|
||||
|
прицеп |
|
Прицеп с передней |
|
|||
13 |
2 |
поворотной осью и задними |
|
||||
(роспуск) |
|
||||||
|
|
управляемыми колесами |
|
||||
|
|
|
|
||||
14 |
прицеп |
2 |
Прицеп с передними |
|
|||
(роспуск) |
управляемыми колесами |
|
|||||
|
|
|
|||||
|
|
|
|
22 |
|
|
|

1 |
2 |
3 |
4 |
|
5 |
15 |
прицеп |
2 |
Прицеп cо всеми |
|
|
(роспуск) |
управляемыми колесами |
|
|
||
|
|
|
|
||
16 |
прицеп |
2 |
Роспуск с крестовой |
|
|
(роспуск) |
сцепкой без груза |
|
|
||
|
|
|
|
||
17 |
прицеп |
2 |
Прицеп со всеми |
|
|
(роспуск) |
управляемыми колесами |
|
|
||
|
|
|
|
||
|
прицеп |
|
Прицеп с передней |
|
|
18 |
3 |
поворотной осью |
|
|
|
(роспуск) |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Прицеп с передней |
|
|
19 |
прицеп |
3 |
поворотной осью и задней |
|
|
(роспуск) |
само - устанавливающей |
|
|
||
|
|
|
|
||
|
|
|
(плавающей) осью |
|
|
|
|
|
Прицеп с передней |
|
|
20 |
прицеп |
3 |
поворотной осью, средней |
|
|
(роспуск) |
неподвижной осью и задней |
|
|
||
|
|
|
|
||
|
|
|
управляемой осью |
|
|
|
|
|
Прицеп с передними |
|
|
21 |
прицеп |
3 |
управляемыми и задними |
|
|
(роспуск) |
самоустанавливающимися |
|
|
||
|
|
|
|
||
|
|
|
колесами |
|
|
|
прицеп |
|
Прицеп со всеми |
|
|
22 |
3 |
управляемыми колесами |
|
|
|
(роспуск) |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
прицеп |
|
Прицеп со всеми |
|
|
23 |
3 |
управляемыми колесами |
|
|
|
(роспуск) |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
24 |
полуприцеп |
1 |
С неуправляемыми |
|
|
колесами |
|
|
|||
|
|
|
|
|
|
25 |
полуприцеп |
1 |
С управляемыми колесами |
|
|
|
|
|
|
|
|
26 |
полуприцеп |
2 |
C неуправляемыми |
|
|
колесами |
|
|
|||
|
|
|
|
|
|
|
|
|
С задними |
|
|
27 |
полуприцеп |
2 |
самоустанавливающимися |
|
|
|
|
|
колесами |
|
|
28 |
полуприцеп |
2 |
С управляемыми колесами |
|
|
|
|
|
|
|
|
29 |
полуприцеп |
3 |
C управляемыми колесами |
|
|
|
|
|
|
|
|
|
Многообразие вариантов структурных схем - число |
, различных |
|||
цепей графа транспортного элемента, состоящего из k |
элементарных |
||||
|
|
|
23 |
|
|
кинематических |
звеньев, может |
быть весьма велико и выражается |
||||
зависимостью |
=2n |
. |
Общеежечисловариантовструктур- |
|||
ныхсхемтранспортногозвена, |
состоящегонеболеечемизk |
- |
ЭКЗ, |
|||
равно |
. |
|
|
|
|
|
Разнообразие еще более возрастает при рассмотрении способов сопряжений различных родов ЭКЗ, входящих в состав ТЗ автопоезда. Из вышеуказанного следует, что в структуре автомобильных поездов и их элементов заложен значительный конструктивный потенциал, позволяющий осуществлять структурный синтез автопоезда с заданными свойствами, а также конструировать структурные схемы новых типов подвижного состава.
В рамках введенных обозначений структура автопоезда, состоящего из N транспортных звеньев, выражается следующей структурной формулой:
|
|
(1.5) |
|
.где |
- индексная |
переменная обозначает структуру автопоезда, |
|
переменные |
описываются формулой (П.1.1), |
- |
|
индексные переменные определяют тип связей между ТЗ. Значения последних переменных находятся из табл.1.4, в которой для обозначения связи использованы индексные переменные
|
|
|
Таблица 1.4. |
|
|
|
|
→ |
→ |
→ |
|
icтз1 |
icтз2 |
icтз |
ТипсвязимеждуТЗ |
→ |
→ |
→ |
Опорнаяне управляющая |
0 |
0 |
00 |
|
→ |
|
→ |
Опорнаяуправляющая |
0 |
|
01 |
|
→ |
→ |
→ |
Тяговаяне управляющая |
1 |
0 |
10 |
|
→ |
→ |
→ |
Тяговаяуправляющая |
1 |
1 |
11 |
|
Наличие зазоров в сцепных устройствах ТЗ будем обозначать аналогично тому, как это сделано для обозначения зазоров в шарнирах, связывающих ЭКЗ, значками | , - , + перед значением переменной  .
.
24
Таким образом, на основе системных принципов разработана система классификации и кодирования автопоездов по структурным признакам, получены формулы, позволяющие в компактном виде описывать структуры автопоездов.
Выведенные структурные формулы целесообразно использовать как при постановке задач исследования автопоездов, так и при анализе содержания опубликованных НИР по автомобильным поездам.
Структурный анализ, систематизирующий и изучающий звенья и связи звеньев автопоездов, имеет важное не только теоретическое, но и прикладное значение, так как позволяет осуществлять структурный синтез автопоезда с заданными свойствами, например, с целью получения определенных желательных маневренных или других эксплуатационных свойств проектируемого автопоезда.
1.5. О представлениях движения автопоезда как механической системы
Автопоезд будем рассматривать как объект теоретической механики
- механическую систему связанных твердых тел.
Обычно главной задачей теоретической механики считают получение закона движения, то есть явной зависимости всех без исключения координат движущегося объекта от времени. Зная закон движения, мы получаем информацию обо всех свойствах движения, т.е.
полную информацию о движении.
Однако, закон движения – не единственный способ представления информации о движении. Например, если известны дифференциальные уравнения движения и начальные условия, то с помощью интегрирования (решения задачи Коши) можно получить закон движения. Это представление в неявном виде содержит в себе информацию о движении. Могут существовать и другие представления, из которых путем той или иной процедуры можно получить закон движения.
Представлением информации о движении (функционировании)
механической системы назовем любой способ передачи информации о конфигурации механической системы и ее положения относительного некоторой системы отсчета на заданном временном промежутке.
По Кореневу Г. В.[65]представление информации называется
полным, если оно единственным образом определяет закон движения. Всякое полное представление информации в явном или неявном виде
содержит в себе полную информацию о движении, но не всякое полное представление может оказаться удобным (целесообразным) для решения того или иного вопроса. Существуют более конструктивные представления информации о движении, отличающиеся от закона движения или дифференциальных уравнений движения с начальными условиями,
25

непосредственно доставляющие нам информацию о том, что описываемое движение достигает наперед заданной цели или обладает наперед заданными свойствами. Например, представление движения управляемой точки в виде требования не покидать некоторую поверхность, стягивающуюся в точку, существенно отличается от представлений в виде закона движения или дифференциальных уравнений движения с начальными условиями. В приведенном примере представление определено не полностью.
Неполным представлением информации называется представление,
из которого нельзя найти закон движения. Часто неполные представления могут быть более конструктивными, чем полные.
Представления движения могут быть заданы при помощи конечного числа уравнений различных типов, которые могут быть алгебраическими, обыкновенными дифференциальными уравнениями любого порядка, интегро-дифференциальными уравнениями, дифференциальными уравнениями в частных производных и т.д. Представления, заданные конкретным типом уравнений, назовем однородными представлениями.
Наряду с однородными представлениями можно рассматривать
кусочно-однородные представления, которые можно задать так. Пусть
представлений: |
, , …, |
, |
представленысистемами |
уравнений: |
, , |
|
…, , которые описывают функционирование механической системы |
на |
|||||
временных промежутках |
|
, |
, … |
, |
. В |
|
моменты времени |
, |
, |
… , |
происходит |
последовательное |
|
переключение представлений по некоторому алгоритму. При этом функционирование системы на временном промежутке
на временном промежутке  описывается представлением
описывается представлением  .
.
Таким образом, при описании, моделировании и исследовании системы  при заданных условиях ее функционирования, информация о ее функционировании может иметь различные представления.
при заданных условиях ее функционирования, информация о ее функционировании может иметь различные представления.
1.6.Формирование структурных и вычислительных модулей
Системной матрицей модели функционирования автопоезда назовем матрицу, элементами которой являются всевозможные представления функционирования автопоезда как механической системы.
Для формирования таких представленийсначаланеобходимосформировать структурныеи соответствующие имвычислительные модули,затем
скомпоноватьуказанные модули в конкретное представлениефункционирования автопоезда. Далее, на основе сформированной математической (вычислительной) модели можно приступать к этапу исследования функционирования автопоезда.
26

При построении структурных и вычислительных модулей систем Q и
ФиблоковТ, Х,Е будем исходить из следующих положений.
Вкачестве объекта исследованияпримем автомобильный поезд (АП). Автопоезд будем описывать механической цепью, состоящей из N шарнирно сочлененных транспортных звеньев, представленных системой
твердых тел, с каждым из которых жестко связана система
координат |
окружение |
автопоезда- |
неподвижной прямоугольной системой |
координат |
, связанной с |
землей. Дорогу будем представлять |
поверхностью |
в |
неподвижной системе координат, в частности, горизонтальной опорной плоскостью z = const; время – независимой переменной t. Движение твердого тела, являющегося частью автопоезда, будем задавать текущим координатами некоторой его точки в неподвижной или подвижной системе координат и текущими значениями углов, задающих ориентацию тела в пространстве,и их производными. Воздушную среду будем моделировать возмущающими силами и силами аэродинамического сопротивления; управления – в виде функций управления, с той или иной степенью полоты и конкретизации отражающих действия водителя.
Выделим наиболее типичные модули, представляющие содержание систем Q, Ф и блоковТ,Х,Е.
Блок А
Пусть блокА представляет совокупность следующих структурных модулей, описывающих автопоезд:
–структуры автопоезда,
–линейных размеров,
M = ( |
) – |
масс и |
– моментов |
инерции тел, |
составляющих |
АП, |
–упругих |
элементов, |
|
|
|
– |
диссипативных |
элементов, |
– элементов сухого трения.
Пусть индексы разбиения выделенных модулей на уровни имеют следующие значения
Аналогично определяются
27

Аналогично для |
. |
Блок S
28
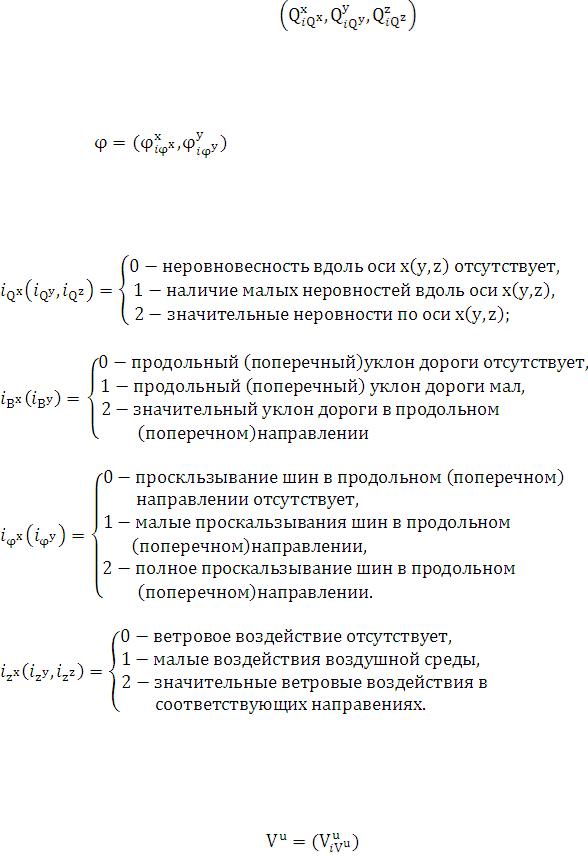
Принимается, что блок Sсостоит из модулей:  – дорожных
– дорожных
воздействий, где модули Q = |
– ровности дороги |
(множество кинематических характеристики, описывающих микрорельеф дороги), B =  ) – наличия уклонов опорной плоскости дороги
) – наличия уклонов опорной плоскости дороги
(множество направляющих косинусов, задающих ориентацию опорной
плоскости |
в |
связанной |
землей |
неподвижной |
системы |
координат); |
|
– |
характеристик сцепления колес с опорной |
||
поверхностью (множество коэффициентов сцепления); 
– воздействие воздушной среды (множество параметров, определяющих силы сопротивления воздуха).
Значение индексов i означают
Блок U
Пусть блок U, представленный совокупностью структурных модулей, описывающих управляющие воздействия водителя или
программу движения, состоит из модулей  направляющей
направляющей
(программной) траектории, |
– скоростных режимов |
движения,  - режимов ускорений (замедлений) движения,
- режимов ускорений (замедлений) движения,
29

- обратных связей управления. Пусть значения индексов i
означают
Блок Х
Пусть блок Х представляет совокупность структурных модулей  Здесь модуль
Здесь модуль - множество координат,
- множество координат,
определяющих положение некоторой точки твердого тела в неподвижной системе координат или в системе координат, связанной с другим телом, а также углов, задающих ориентацию твердого телав соответствующих системах координат. Причем  означает, что координаты постоянны
означает, что координаты постоянны
(например, определяют положение статического равновесия), |
- |
малые отклонения от некоторого стационарного положения, |
- |
большие отклонения от стационарного положения. Модуль |
- |
множество относительных величин, определяющих упругие деформации
элементов |
подвески ( |
), колес ( |
), сцепки |
( |
), перемещения |
трущихся |
частей в |
подвеске ( |
), сцепке ( |
) |
и величины |
проскальзывания контактной площадки колеса относительно дороги ( ). При этом пусть значения
). При этом пусть значения  соответственно означают отсутствие, малость и значительность перечисленных относительных перемещений.
соответственно означают отсутствие, малость и значительность перечисленных относительных перемещений.
Модули |
множества |
первых |
и |
вторых |
|
производных от величин, |
входящих |
в |
модули |
Х, |
∆, а |
|
30 |
|
|
|
|