

713
.pdfбазируются на принципах теоретической механики, теории устойчивости, теории оптимального управления и т.д. В результате теоретического описания поведения автопоезда получают его математическую модель
(ММ).
Системный способ описания функционирования автопоезда основывается на системном подходе, теории структур, теории графов и других научных дисциплинах. Результатом такого описания является модульная модель (ММод) функционирования автопоезда, которая в отличие от математической модели содержит параметры, позволяющие формировать различные математические модели, и, следовательно, управлять исследовательским процессом. Частные математические модели, получаемые из модулей общей модели, могут быть рассчитаны аналитическим (А) (получение функциональных зависимостей с помощью преобразований и аналитических методов) или (и) с помощью вычислительной техники – аналоговой (АВМ) или персонального компьютера (ПК).
С целью сокращения записи содержание задачи исследования автопоезда будем обозначать структурной формулой
И=(МИ,СО,МАП,СР) |
(1.1) |
где МИ, СО, МАП, СР могут принимать значения соответственно из
множеств |
, |
. Например, |
|
означает |
исследование, являющееся теоретическим |
моделированием автопоезда с последующим расчетом на ПК его математической модели,  -
-
комплексное исследование натурного образца автопоезда и его физической модели с применением теоретических методов описания и представления физической и математической моделей, с последующим расчетом математической модели на аналоговых вычислительных машинах и на персональном компьютере.
1.3.Системное описание функционирования автопоезда
Под системным описанием функционирования автопоезда будем понимать построение системыструктурных блоков и модулей, в компактной форме отражающих параметры автопоезда, окружающей его среды, характеристики управления, кинематические и силовые связи, а также информацию о функционировании автопоезда и качестве его функционирования (эксплуатационных свойствах).
Для разработки положений такого описания формализуем основные
понятия, |
предъявляя |
к |
водимым |
определениям |
требования |
|
|
|
11 |
|
|
конструктивности, универсальности и вычислительной ориентированности.
В основу системной моделиисследования взаимодействия автопоезда с дорогой и воздушной средой при наличии управляющих воздействий водителя положим принцип независимости оценки свойств элементов системыQ: «автопоезд (А), внешняя среда (S),управление (U)» и элементов системы связей Ф: «кинематических (ψ), активных силовых (внешних) (F), пассивных силовых (внутренних) (N)». При этом взаимодействие элементов системы Qосуществляется посредством элементов системы связей Ф. Пусть Т – блок интервалов времени функционирования автопоезда и его частей, Х – блок показателей функционирования автопоезда, Е – логический блок показателей качества функционирования автопоезда.
Будем рассматривать блоки систем Q и Фв виде совокупностейуровневых модулей:
|
|
(1.2) |
Ф = |
|
|
= |
. |
(1.3) |
Здесь |
модули |
|
представляющие собой символическую запись эвристик(предположений относительно объекта исследования, окружающей его среды, управления, кинематических и силовых связей), рассматриваются в качестве обозначений факторов-причин, обусловливающих исследуемые объекты,процессы или явления, а индексы i – как качественные уровни этих эвристик.
При |
этом пусть |
означает |
явное предположение отсутствия |
|
некоторого |
фактора (или |
действие |
фактора постоянно), |
- |
минимальный учет фактора (учет фактора с ограничениями, малость параметра по отношению к характерному параметру и т.д.),  - детальный учет фактора (учет фактора без ограничений, сопоставимость параметра с характерным параметром и т.д.). Отсутствие в записях (1.2), (1.3) некоторого модуля означает неявное предположение об отсутствии соответствующего этому модулю фактора. По существу индекс модуля ―распознает‖ (фиксирует) некоторый атрибут элемента, включенного в процесс исследования, и, в зависимости от значимости этого атрибута для исследователя, относит его к определенному уровню.
- детальный учет фактора (учет фактора без ограничений, сопоставимость параметра с характерным параметром и т.д.). Отсутствие в записях (1.2), (1.3) некоторого модуля означает неявное предположение об отсутствии соответствующего этому модулю фактора. По существу индекс модуля ―распознает‖ (фиксирует) некоторый атрибут элемента, включенного в процесс исследования, и, в зависимости от значимости этого атрибута для исследователя, относит его к определенному уровню.
12
Систему  примем в качестве формализации общей
примем в качестве формализации общей
задачи исследования функционирования автопоезда и оценки эффективности его функционирования. При этом формализованная постановка конкретной задачи представляет собой совокупность (граф типа дерево) конкретных структурных уровневыхмодулей с определенными значениями соответствующих им индексов.
Чтобы иметь более полное представление о содержании исследования необходимо дополнительно провести анализ структуры входящих всостав автопоезда звеньев и характера их сочленения. Для условного (формализованного) обозначения автопоезда будем пользоваться структурными формулами, полученными при структурном анализе автопоездов[16].
1.4. Структурный анализ автопоездов
Криволинейное движение автопоезда существенно зависит от его состава, который характеризуется количеством и конструкцией связанных между собой звеньев автопоезда.
Автопоезда, находящиеся в эксплуатации, весьма разнообразны по своей конструкции, что обусловлено в основном прицепным составом и способами соединения звеньев автопоезда. В зависимости от назначения прицепной состав может иметь различные типы поворотных и сцепных устройств, разное количество, тип и компоновку ходовых осей [49].
Автопоезд представляет собой механическую цепь, состоящую из ряда шарнирно связанных транспортных элементов. Основные кинематические и динамические свойства автопоезда зависят от физических явлений, происходящих при его движении, которые в свою очередь определяются структурой автопоезда.
Исследование автопоездов требует их четкой систематизации по структурным признакам, теоретическое описание которой осуществляется на базе структурного анализа автопоездов [52].
Автопоезда следует делить на отдельные звенья по их транспортному назначению (транспортное звено) и по кинематическим признакам (кинематические звенья).
Транспортное звено (ТЗ) - конструктивно законченный элемент, имеющий четкое транспортное назначение: автомобиль-тягач, прицеп, полуприцеп, роспуск и т.п.
Кинематическое звено - конструктивный элемент, характеризуемый как система связанных твердых тел, имеющий шарнирные соединения с другими кинематическими звеньями автопоезда. При этом составляющие тела такой системы движутся по самостоятельным траекториям. Любой сложный по своему составу и конструкции автопоезд в конечном счете состоит из элементарных кинематических звеньев (ЭКЗ). Поэтому все
13
возможные конструкции автопоездов можно представить как разнообразные комбинации из ЭКЗ. Характерными признаками ЭКЗ являются ходовая ось с колесами и шарнирные или жесткие связи с сопряженными кинематическими звеньями.
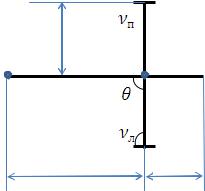
В общем случае ЭКЗ состоит из ходового элемента - ходовой оси звена, включающей по крайней мере два колеса, и несущего элемента (поводка) - продольной оси звена (рис.1.2).
|
a/2 |
|
1 |
2 |
3 |
L c
Рис.1.2. Элементарное кинематическое звено автопоезда
1- ведущая точка звена(передний шарнир), 2- основная точка звена (проекция середины ходовой оси на опорную
поверхность), 3- задний шарнир,
L- длина несущего элемента, с - вынос заднего шарнира,
ν- угол между плоскостью колеса и ходовой осью, «п» и «л» соответственно означают правое и левое колесо,
θ - угол между продольной и ходовой осями звена.
Взависимости от значений величиныL определим род ЭКЗ. При отсутствии несущего элемента (L = 0) ЭКЗ представляет собой одну ходовую ось. Такое звено назовем звеномнулевого рода. Если несущий элемент присутствует(L> 0), такое звено назовем звеном первого рода.
Взависимости от углаν,характеризующего взаимное расположение плоскостей колес и ходовой оси, будем различать звенья сколесамиповоротными (управляемыми –угол ν в процессе движения может быть отличным от π/2) и неповоротными (неуправляемыми ν=π/2).
Учитывая взаимное положение продольной оси звена и ходовой осей, характеризуемое углом θ,будем различать звенья с осями поворотными (управляемыми –угол θ может изменяться от π/2 при прямолинейном движении звена до некоторых меньших величин при криволинейном движении звена) и неповоротными (неуправляемыми, θ =π/2 при любых режимах движения).
14
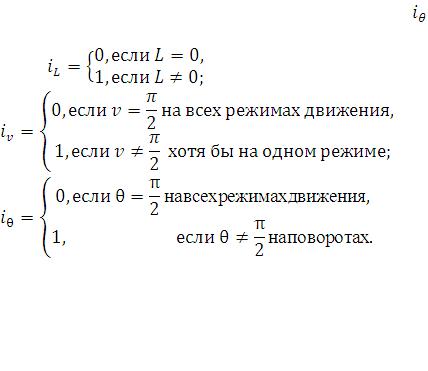
Введем индексные переменные iL , iv , |
, значения которых |
определяются следующим образом: |
|
Тогда род ЭКЗ можно определить совокупным индексом iз, значения которого приведены в табл. 1.1.
|
|
|
|
Таблица1.1. |
iL |
iv |
iθ |
iз |
Р о д Э К З |
|
|
|
|
|
0 |
0 |
0 |
00 |
Нулевое звено с неповоротными колесами и |
|
|
|
|
неповоротной осью |
|
|
|
|
|
0 |
0 |
1 |
01 |
Нулевое звено с неповоротными колесами и |
|
|
|
|
поворотной осью |
|
|
|
|
|
0 |
1 |
0 |
02 |
Нулевое звено с поворотными колесами и |
|
|
|
|
неповоротной осью |
|
|
|
|
|
0 |
1 |
1 |
03 |
Нулевое звено с поворотными колесами и |
|
|
|
|
поворотной осью |
|
|
|
|
|
1 |
0 |
0 |
1 0 |
Звено 1-го рода с неповоротными |
|
|
|
|
колесами и неповоротной осью |
|
|
|
|
|
1 |
0 |
1 |
1 1 |
Звено 1-го рода с неповоротными |
|
|
|
|
колесами и поворотной осью |
|
|
|
|
|
1 |
1 |
0 |
12 |
Звено 1-го рода с поворотными |
|
|
|
|
колесами и неповоротной осью |
|
|
|
|
|
1 |
1 |
1 |
1 3 |
Звено 1-го рода с поворотными |
|
|
|
|
колесами и поворотной осью |
|
|
|
|
|
Наличие подвески звена будем отмечать приписыванием значка ―п‖ значению индекса iз, например, iз = , означает звено первого рода с
, означает звено первого рода с
неуправляемыми колесами и поворотной подрессоренной осью. Относительные перемещения звеньев, а также форма их траекторий на
опорной поверхности определяются в значительной мере способом их соединения, характером связей между ними.
15
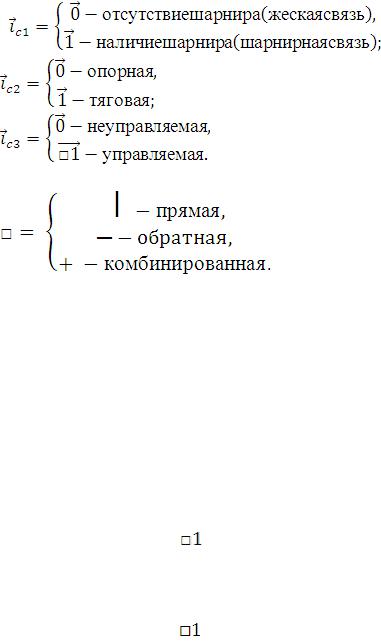
Звенья могут быть связаны между собой либо жестко, либо шарнирами, допускающими относительные возможные перемещения звеньев в плоскости их движения. Если поворот в шарнире не вызывает изменений углов vили θ, то такую связь назовем неуправляющей, в противном случае - управляющей. Управляющая связь может быть прямой, обратной и комбинированной [49]. С точки зрения динамического взаимодействия, между звеньями различают тяговую и опорную связи.
В рамках структурного анализа автопоездов удобно пользоваться структурными формулами (кодами), отражающими тип связи. Для вывода этих формул введем индексные переменные  которые определяют свойства связи:
которые определяют свойства связи:
Здесь значок служит для обозначения характера управляемой связи
Введенные таким образом индексы могут быть агрегированы в один индекс характеризующий тип связи между ЭКЗ. Сводная классификация
характеризующий тип связи между ЭКЗ. Сводная классификация
типов связей, основанная на такой кодировке, представлена в табл. 1.2. Таблица1.2.
|
→ |
→ |
→ |
→ |
ТипсвязимеждуЭКЗ |
|
|
ic1 |
ic2 |
ic3 |
ic |
||
|
|
|
||||
|
→ |
- |
- |
→ |
жесткаясвязь–отсутствиешарнира |
|
|
0 |
0 |
||||
|
|
|
|
|
||
|
→ |
→ |
→ |
→ |
опорнаяне управляющая |
|
|
1 |
0 |
0 |
00 |
||
|
|
|
||||
|
→ |
→ |
→ |
→ |
опорнаяуправляющая |
|
|
1 |
0 |
1 |
0 |
||
|
|
|
||||
|
|
|
|
|
|
|
|
→ |
→ |
→ |
→ |
тяговаяне управляющая |
|
|
1 |
1 |
0 |
10 |
||
|
|
|
||||
|
→ |
→ |
→ |
→ |
тяговаяуправляющая |
|
|
1 |
1 |
1 |
1 |
||
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
16

Наличие зазоров в сцепном устройстве будем отмечать добавлением
перед значением индекса |
соответственно знаков: I- поперечный, - |
продольный, + - продольный и поперечный зазоры. Если зазоры в
сцепном устройствеотсутствуют (не учитываются), то указанные выше знаки не ставятся. Например, означает тяговую неуправляемую связь,
имеющую поперечный зазор, |
опорную беззазорную управляемую |
связь и т.д.
Под структурой автопоездабудем понимать количество звеньев автопоезда,характеристики этих звеньев и способ их связей.
Особенности структуры автомобильных поездов определяются в основном структурой прицепных транспортных элементов, обладающих значительным конструктивным разнообразием. Структура ведущих элементов (тягачей-автомобилей) имеет значительно меньшее разнообразие. Структурные отличия автомобилей заключены в основном в различном количестве ходовых осей (осности автомобиля) и в возможностях управления колесами этих осей (управляемости - неуправляемости осей). Прицепные же элементы могут состоять из нескольких ЭКЗ разного рода, сопряженных различными способами.
Основные принципиальные схемы прицепных элементов (автопоездов) представлены на рис. 1.3.
 Р ис. 1.3. Принципиальные схемы прицепных звеньев АП
Р ис. 1.3. Принципиальные схемы прицепных звеньев АП
17
Схемы большинства одно-, двух- и трехзвенных прицепных элементов автопоездов1 приводятся к представленным выше схемам, так как одна и та же принципиальная схема прицепного звена автопоезда может соответствовать совершенно различным с конструктивной точки зрения элементам.
Систематизация структурных схем транспортных элементов ав-
топоезда на основе структурного анализа позволяет представить структуры этих элементов в виде графов. На рис. 1.4 изображены ориентированные конечные однородные графы степени два, описывающие соответственно структуры автомобиля (а) и прицепного эвена (б) - прицепа, полуприцепа или роспуска. Жирные точки на вершинах графов обозначают элементарные кинематические звенья, стрелки (дуги графов) - связи между ЭКЗ. Вершины графов пронумерованы индексами p , q = 0, 1, 2, ... , вид связи отмечен значениями индексов типов связей  .В качестве начальных вершин графов а) и б) приняты вершины, обозначающие соответственно переднюю управляемую ось автомобиля
.В качестве начальных вершин графов а) и б) приняты вершины, обозначающие соответственно переднюю управляемую ось автомобиля  и ведущее по отношению к
и ведущее по отношению к
прицепному элементу кинематическое звено  . РодЭКЗ, обозначенного на графах (р, q)-й вершиной, определяется координатными осями
. РодЭКЗ, обозначенного на графах (р, q)-й вершиной, определяется координатными осями  и
и  следующим образом. Если стрелка указывает на эту вершину в направлении оси
следующим образом. Если стрелка указывает на эту вершину в направлении оси  , то значение индексной переменной, отражающей род этого звена равно значению
, то значение индексной переменной, отражающей род этого звена равно значению  , в противном случае - значению
, в противном случае - значению .
.
Структура некоторого конкретного транспортного элемента, состоящего из kЭКЗ, описывается соответствующей цепью этих графов, соединяющей начальную вершину последовательнос вершинами, имеющими индексы ( ,
,  ), суммы которых
), суммы которых  +
+  равны е ( е= 1, 2, ... , n), где
равны е ( е= 1, 2, ... , n), где
Эта цепь может быть представлена следующей структурной формулой
iТЗ (1.4)
(1.4)
где iТЗ - индексная переменная, служащая для обозначения структуры транспортного звена,  - индексные переменные, отражающие типы связей между ЭКЗ, значения которых определяются из табл. 1.2,
- индексные переменные, отражающие типы связей между ЭКЗ, значения которых определяются из табл. 1.2,  - индексы, определяющие род ЭКЗ (табл.1.1).В табл. 1.3
- индексы, определяющие род ЭКЗ (табл.1.1).В табл. 1.3
приведены полученные на основе формулы (1.4) некоторые структурные формулы транспортных звеньев автопоезда, наиболее часто встречающихся
1Из рассмотрения исключены автопоезда, имеющие параллельные сопряжения ТЗ и ЭКЗ.
18

в практике эксплуатации автопоездов -автомобиля-тягача |
(с числом |
|
осей не более 4-х), прицепов |
и полуприцепов |
(с числом не |
более 3-х). Здесь |
|
|
 ,
, 
19
а) Автомобиль
 =
=
(3,0
(2,0) (2,1)
(1,0) (1,1) (1,2)
(0,0) |
(0,1) |
(0,2) |
(0,3) |
q+p=1 q+p=2 q+p=3
k- осность
2-х осный 3-х осный 4-х осный
б) Прицепной элемент автопоезда
= |
{ , , } |
(3,0)
(2,0) (2,1)
(1,0 (1,1) (1,2)
(0,0) (0,1) (0,2) (0,3)
q+p=1 q+p=2 q+p=3
k- осность
2-х осный 3-х осный 4-х осный
Рис. 1.4. Графы, изображающие структурные схемы звеньев автопоезда
20