

3.2 Системы электрогидравлического привода
3.2.1 Основные сведения об электрогидроприводе.
В настоящее время на летательных аппаратах находят широкое применение быстродействующие следящие гидравлические приводы с электрифицированными управляющими устройствами.

Рис. 3.4. Структурная схема следящего электрогидравлического привода
В качестве примера можно назвать приводы, предназначенные для управления входными устройствами авиадвигателя, створками реактивного сопла, шасси и др.
Исполнительным двигателем типового следящего электрогидропривода (рис.3.4) является гидродвигатель. Преобразование электрических сигналов управления в перемещение золотника осуществляется в гидроусилителе. Управление следящим гидроприводом может быть либо непрерывным, либо широтно-импульсным. Последнее обладает рядом преимуществ, например, снижается возможность засорения проходных отверстий гидроусилителей, облегчаются условия работы электронных усилителей и др. Но следует учитывать, что при широтно-импульсном управлении имеют место непроизводительный расход жидкости через золотник и вибрации штока силового цилиндра гидродвигателя. Поэтому силовые гидроприводы в большинстве своем выполняются с непрерывным управлением.
Мощность силовых гидроприводов достигает десятков киловатт. Исполнительный механизм в электрогидроприводе преобразует энергию жидкости в механическую работу. Такое преобразование осуществляется гидродвигателем вращательного действия, а также силовыми цилиндрами прямолинейного и поворотного движений. Изменение скорости движения поршня силового гидроцилиндра происходит в результате дросселирования потоков жидкости путем изменения проходных сечений золотника.
Программа движения исполнительного двигателя в гидроприводе задается распределительными устройствами (гидрокранами, золотниками и др.), которые позволяют менять направление потока жидкости и регулировать его расход. Энергия от источников передается к исполнительным механизмам по трубопроводам.
Гидроагрегаты обладают малыми моментами инерции подвижных частей из-за малых масс и габаритов. Это обеспечивает их высокое быстродействие и приемистость. Коэффициент усиления гидравлических устройств может достигать нескольких тысяч. Рабочее давление гидросистем составляет в настоящее время от 7 до 22 МПа. В качестве рабочей жидкости используются гидросмеси АМГ-10, АМГ-10Ф.
Золотниковые краны
Наиболее широкое применение находят золотниковые краны с электрическим (дистанционным) управлением.

Рис. 3.11. Схема двухпозиционного крана прямого действия с электрическим приводом:
1—электромагнит; 2—золотник; 3—пружина; 4 — корпус;
5—исполнительное устройство
Двухпозиционный кран прямого действия с электрическим приводом (рис. 3.11). При выключенном кране (обесточенной обмотке электромагнита) золотник 2 под действием пружины Л 'находится в крайнем левом положении. При этом магистраль питания перекрыта, а исполнительное устройство 5 сообщено :со сливом.
При включении крана (замыкании обмотки электромагнита) его сердечник перемещает золотник вправо и соединяет исполнительное устройство с контуром питания.
Для перемещения золотника необходимо преодолеть усилие складывающееся из осевых сил давления жидкости, действующих на золотник, и сил трения золотника о стенки гильзы. Осевые силы, действующие на золотник от рабочего и сливного давления, взаимно уравновешиваются за счет подбора площадей золотника, на которые воздействует рабочая жидкость.
Величина сил трения золотника зависит от целого ряда факторов. Одной из причин увеличения трения золотника является неравномерное распределение давления жидкости в радиальном кольцевом зазоре, образованном золотником и стенкой гильзы. Это происходит в основном из-за перекоса оси золотника относительно оси гильзы или неправильной геометрии поясков золотника. Неуравновешенная радиальная сила поджимает золотник к одной стороне гильзы и увеличивает силу трения.
Второй причиной повышения силы трения является заращивание (облитерация) щели (зазора) между золотником и стенкой адсорбирующимися на поверхности полярными молекулами. При этом происходит частичное или полное сращивание поверхностей золотника и стенки гильзы. Это явление обусловливается очень малыми диаметральными зазорами между золотником и гильзой, которые для обеспечения герметичности выбираются около 0,01 — 0,004 мм.
Силы трения значительно возрастают при попадании в этот зазор механических частиц. Чтобы гарантировать надежную работу рассмотренных кранов, необходимо применять электромагниты с большим тяговым усилием, достаточным для преодоления сил трения. Такие устройства имеют значительные размеры и вес.
Для понижения потребных усилий электромагнита, уменьшения вероятности заедания золотника и одновременно обеспечения большого расхода жидкости через кран в гидравлических системах самолетов находят широкое применение краны с серводействием.
Двухпозиционный золотниковый кран с серводействием, электрическим и ручным управлением (рис. 3.12). Кран включает те же элементы, что и рассмотренный выше: корпус 5, золотник 9, пружину 5, электромагнит 3. Но в этом кране передвижение золотника осуществляется не непосредственно штоком электромагнита, а жидкостью. При выключенном электромагните жидкость под давлением поступает в полости крана А и Б (шарик прижат плево к седлу). За счет разности площадей стакана 7 и золотника 9, а также пружин 5 и б золотник занимает крайнее правое положение и подводит жидкость в правую полость цилиндра 10, левая полость при этом через каналы в золотнике соединяется с магистралью слива. При отсутствии давления жидкости в системе золотник находится в правом положении за счет пружины.
При включении электромагнита его шток перемещает шариковый клапан 4 вправо и соединяет полость А с магистралью слива. В полость Б жидкость продолжает поступать под давлением. Преодолев усилия пружины, золотник перемещается влево и соединяет левую полость цилиндра с насосами, а правую, полость -со сливом, поршень со штоком перемещается вправо.
Для опробования системы на земле в кране предусмотрена ручное управление с помощью кнопки 1 с пружиной 2:'При нажатии кнопки шток электромагнита перемещается вправо и обеспечивает переключение золотника крана аналогично описанному выше. В случае установки крана в кабине самолета это повышает также надежность управления краном в полете.
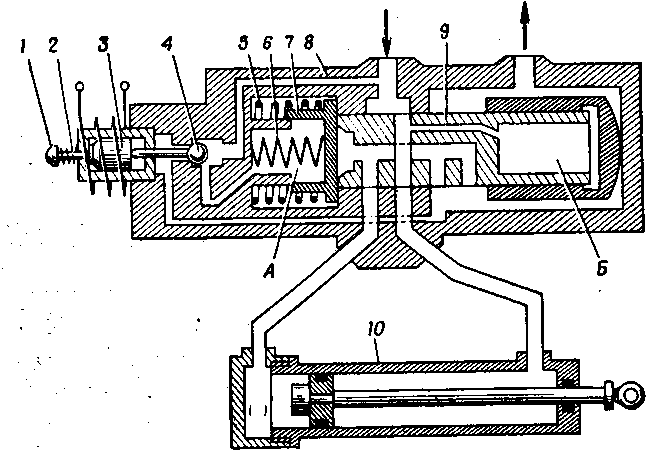
Рис. 3.12. Двухпозиционный золотниковый кран с серводействием: 1 — кнопка; 2, 5, 6-- пружины; 3 — электромагнит; 4 - клапан; 7 — стакан; 8 — корпус; 9 — золотник; 10 — исполнительное устройство
Особенностью такого крана является плоский золотник. Замена цилиндрического золотника плоским позволяет улучшить качество механической обработки рабочих поверхностей гильзы и золотника. Благодаря этому удается уменьшить силы трения при передвижении золотника и обеспечить лучшую внутреннюю герметичность крана. Опыт эксплуатации показывает, что краны с плоскими золотниками наименее подвержены заклиниванию, так как золотник в этом случае свободен от перекосов и не имеет больших зазоров, что предотвращает проникновение абразивных частиц между золотником и гильзой.
Рассмотренные выше двухпозиционные краны не имеют нейтрального положения и поэтому одну из линий потребителей держат непрерывно под высоким давлением. В тех случаях, когда такой необходимости нет, применяют трехпозиционные краны.
Трехпозиционный кран с серводействием, плоским золотником, электрическим и ручным управлением (рис. 3.13). Золотник 1 имеет три фиксированных положения. В нейтральном положении, как это показано на схеме, обе полости цилиндра 11сообщены со сливом, а подвод питания перекрыт.
При смещении золотника в крайнее левое положение левая полость цилиндра сообщается с контуром питания, а правая полость – со сливом. В крайнем правом положении правая полость цилиндра сообщается с контуром питания, а левая полость со сливом.

Рис. 3.13. Трехпозиционный кран с серводействием:
1 -‑ золотник; 2, 10 — толкатели; 3, 9 — гильзы;
4, 7 — электромагниты; 5,6 — шариковые клапаны; 8 — кнопка;
11 — исполнительное устройство
Управляется золотник электромагнитами 4 и 7 с помощью шариковых клапанов 5 и 6. При обесточенных электромагнитах шарики 5 и 6 прижаты к своим седлам и жидкость из контура питания поступает в полости Л и Б. Золотник давлением жидкости фиксируется в нейтральном положении, так как силы давления жидкости, действующие на золотник с двух сторон через равнозначные толкатели 2 и 10, равны (усилия пружин также уравновешены в нейтральном положении).
При включении электромагнита 4 (или при нажатии соответствующей кнопки 8) шарик 5 смещается вправо и, перекрыв магистрали высокого давления, сообщает полость А со сливом. Равновесие сил, действующих на золотник, нарушается. Под действием давления жидкости в полости 5 толкатель 10, золотник 1 гильза 3 и толкатель 2 смещаются в крайнее левое положение.
При этом левая полость цилиндра сообщается с контуром питания, а припая остается сообщенной со сливом.
При выключении электромагнита шарик- под давлением жидкости смещается влево и сообщает полость А с контуром питания, Таким образом, давление в полостях А и Б станет одинаковым. При этом на золотник слева будет действовать сила, создаваемая давлением в полости А на торцовые поверхности гильзы 3 и толкателя 2, а справа — сила, создаваемая давлением в полости Б на торцовые поверхности только толкателя 10 (гильза 9 упирается в корпус крана). Под действием разности этих сил, а также усилия левой пружины золотник будет перемещаться вправо до тех пор, пока гильза 3 не упрется в корпус крана. Тогда силы, действующие на золотник, уравновесятся, и он установится в нейтральное положение.

Рис. 3.14. Кран прямого действия:
1,8—пружины; 2,7—золотники;3,5—толкатели;4,5—электромагниты;9—корпус исполнительного устройства; 10—поршень исполнительного устройства
При включении электромагнита 7 (или при нажатии кнопки 8) золотник переместится вправо. Работа крана при этом будет аналогична.
Рассмотренные краны с серводействием наряду с указанными выше преимуществами имеют серьезный недостаток — время срабатывания золотника крана у них больше, чем у крана прямого действия. Это время в кранах с серводействием определяется временем заполнения и опорожнения объемов А и Б через шариковые клапаны и может доходить до нескольких секунд. Оно зависит от размера отверстий под шариками, от давления и вязкости жидкости, а следовательно, и от ее температуры. Поэтому указанные краны применяются в тех системах, где время срабатывания потребителей значительно больше, чем время срабатывания крана.
В системах, где требуется более высокая скорость срабатывания крана и необходим меньший расход жидкости, находят широкое применение краны прямого действия клапанного типа с электрическим управлением. Эти краны по сравнению с золотниковыми кранами обладают более высокой герметичностью и требуют меньших усилий на передвижение распределителя. В корпусе крана (рис. 3.14) установлены два одинаковых распределительных устройства, имеющих общие линии нагнетания и слива. При выключенных электромагнитах золотники 2 и 7 силой пружин 1 и 8 прижаты острыми кромками к коническим поверхностям седла (верхним). При этом магистрали питания перекрыты, а обе полости цилиндра сообщены со сливом.
При включении электромагнита 4 толкатель 3 перемещает вниз золотник 2 и соединяет левую полость цилиндра с контуром питания, правая полость остается соединенной со сливом. Шток с поршнем перемещается вправо. Этот кран, так же как и вышерассмотренные, имеет ручное управление.