

3.3 Структурная схема свс-2ц-1м
Рассмотрим структурную схему системы в варианте для учебно-боевого самолета (с двумя кабинами). Структурная схема этого варианта представлена на рис 2.
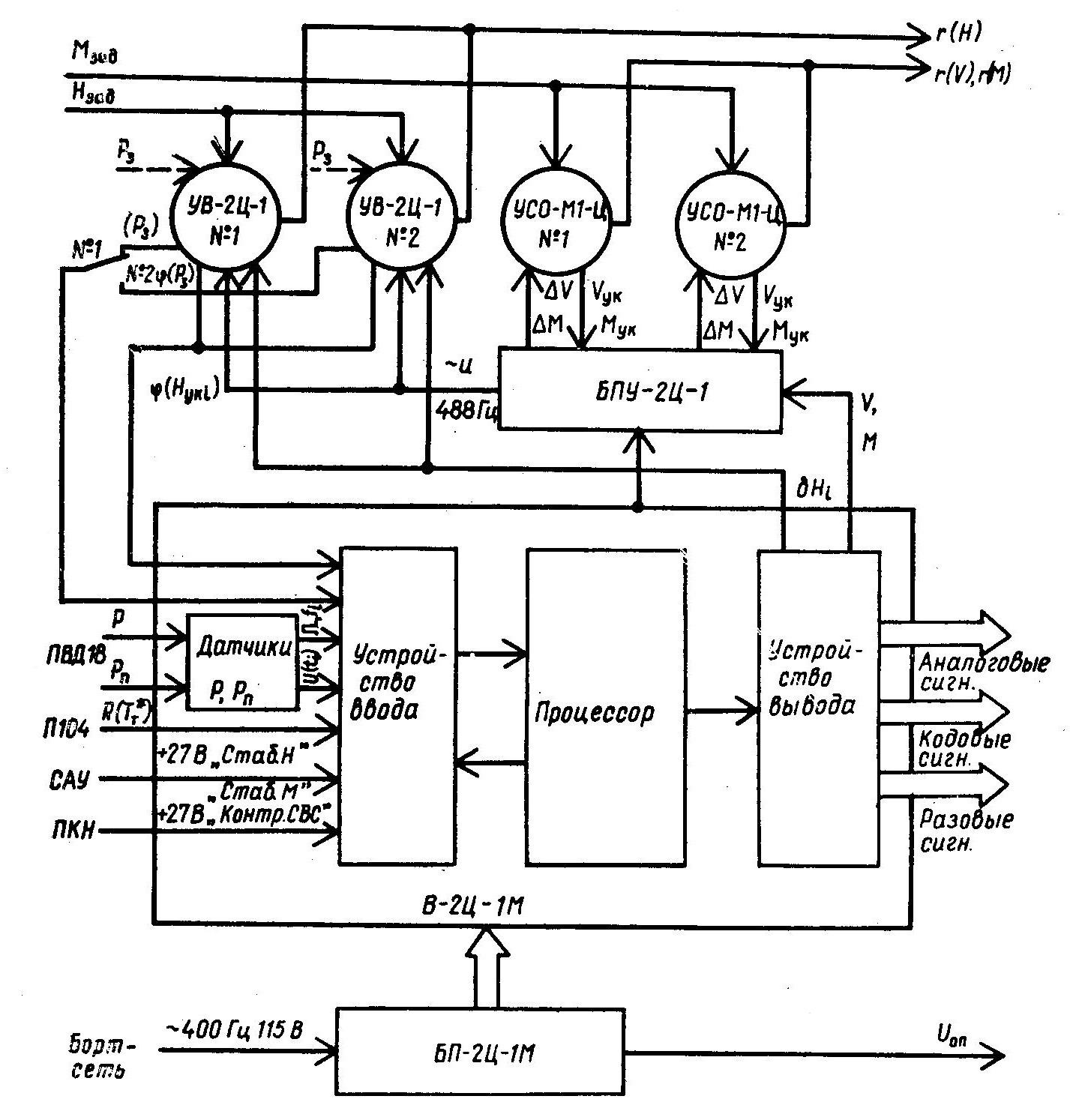
Рис 2 Структурная схема СВС – 2Ц – ТМ.
В состав системы входят: 1. В-2Ц-1М -вычислитель; 2. УВ-2Ц-1 - указатель высоты; 3. УСО-М1-Ц - указатели истинной скорости и числа М; 4. БП-2Ц-1 М - блок питания вычислителя; 5. БПУ-2Ц-1 - блок питания указателей; 6. РМ - рама монтажная (одна, на схеме не показана).
Основными входными сигналами системы являются три параметра: полное, статическое давление (от приемника ПВД-18) и температура заторможенного потока воздуха (от приемника температуры П104).
Кроме того в СВС поступают сигналы:
• Мзадан. и Нзадан. - от бортовой системы наземного наведения;
• "+27В" включения режима стабилизации М и Н - от САУ;
• "+27В" включения режима встроенного контроля СВС-2Ц - от пульта встроенного контроля навигационного комплекса ПКН-2;
• "Рст." вводится вручную, кремальерой на УВ-2Ц-1. ,
Основные входные сигналы и Рст. преобразуются в устройстве вводг вычислителя в коды чисел, которые затем в соответствии с алгоритмом вычисление обрабатываются процессором. Вычисленные параметры выдаются потребителям и для индикации через устройство вывода ( в виде кодов, аналоговых и разовых сигнaлoв ). Индикация высоты осуществляется УВ-2Ц-1, являющимся индикатором )ровой следящей системы в составе: В-2Ц-1М, УВ-2Ц-1. Указание Нзадан. осу-л-вляется с помощью отдельной электромеханической системы УВ-2Ц-1. Индикация инной скорости и числа М производится на УСО-М1-Ц, также включенном в состав дящей системы ( в данном случае аналоговой) из В-2Ц-1М, БПУ-2Ц-1, УСО-М1-Ц. гработка Мзадан. выполняется , как и в УВ-2Ц-1, отдельной электромеханической ютемой. Помимо индикации, указатели выдают в бортовые системы сигналы Нотн., /ист. и М ( в виде относительных сопротивлений Нотн.).
Вычисление и выдача значений Н и M производится только в режимах САУ "Стабилизация М" и "Стабилизация Н" - как разница между текущими и заданными |значениями Н и М ( за последние принимаются текущие значения Н и М в момент прихода команды стабилизации).
Блок питания БП-2Ц-1М вырабатывает стабилизируемые напряжения постоянного тока для вычислителя и некоторых бортовых систем ЛА.
Рассмотрим более подробно основные блоки и функциональные узлы СВС-2Ц-1М: датчик давления (ДДГ), собственно вычислитель и указатели.
3.4 Датчики полного и статического давления типа "ддг".
В рассматриваемой СВС для измерения давлений используются так называемые генераторные датчики давления типа "ДДГ. Конструкция, принципы действия обеих датчиков одинаковы и поясняются рис.3.
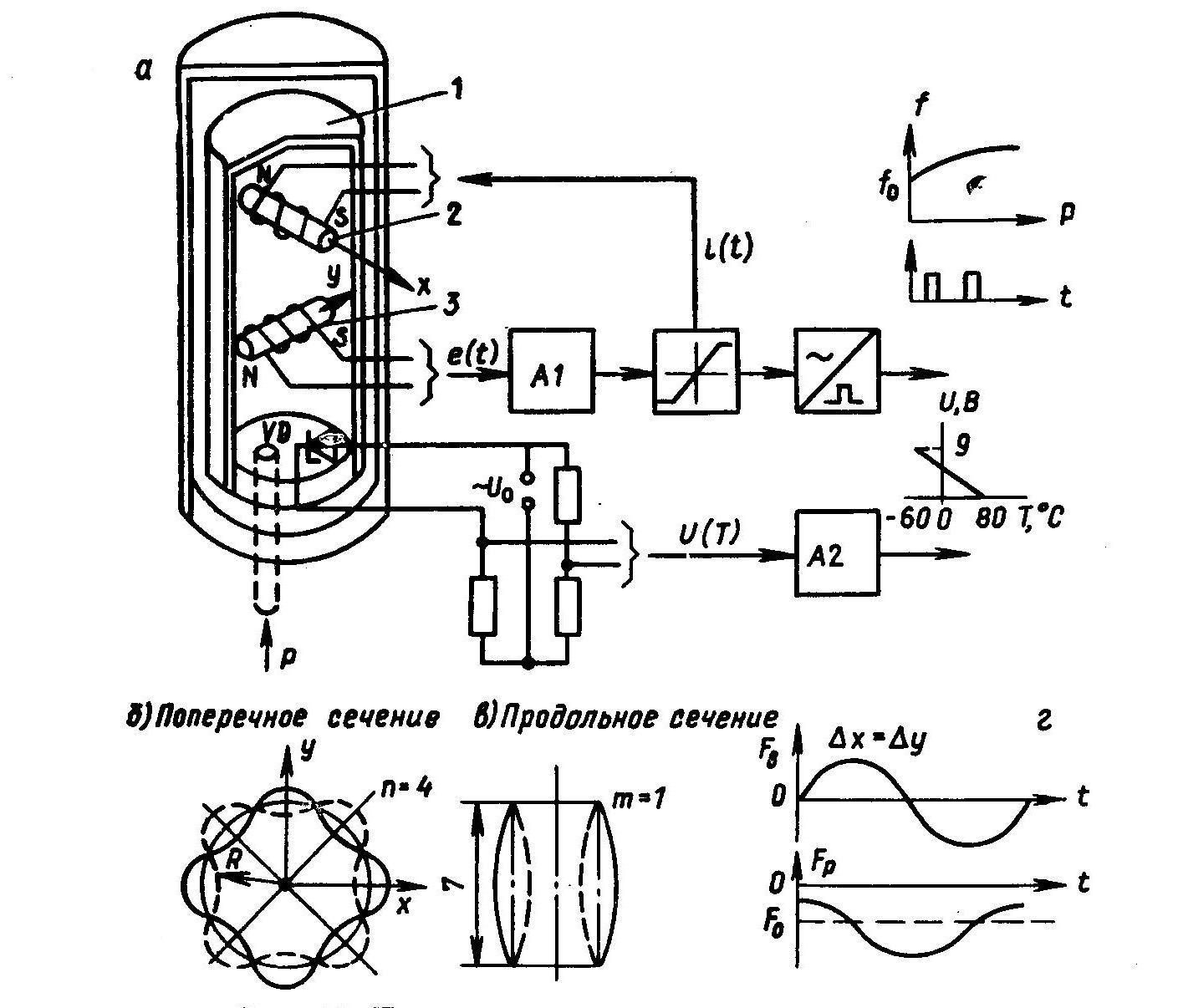
Рис. 3. Принципиальная схема датчика давления. 1 - резонатор; 2, 3 - катушка
Чувствительным элементом датчика является тонкостенный стальной цилиндр I, помещенный в корпус, заполненный гелием или водородом под небольшим давлением (порядка 10 мм.рт.ст.). Измеряемое давление подается внутрь цилиндра. Очевидно, что от величины этого давления будет зависеть частота собственных колебаний цилиндра, как упругой системы. Колебания цилиндра возбуждаются и поддерживаются с помощью двух взаимно-перпендикулярных катушек (2 и 3) с (сердечниками из постоянных магнитов. При подаче питания к датчику в первый момент времени в катушке возбуждения 2 всегда бывает небольшой, бросок тока, достаточный для начала возбуждения системы.
Начальные колебания цилиндра вызывают появление в катушке обратной связи ЭДС, которая после усиления и ограничения передается на катушку 2. Система самовозбуждения на частоте колебаний цилиндрического резонатора, которая принимается за входной информационный сигнал. Формы колебаний цилиндра изображены на рис.
Всю систему (резонатор-автогенератор) можно представить в виде колебательного звена:
![]() Т
- постоянная времени (для реальных ДДГ
Т - 0,035-10с);
- декремент затухания (обычно = 10);
X(t)
- изменение координаты стенки цилиндра
в поперечном сечении;
K
Т
- постоянная времени (для реальных ДДГ
Т - 0,035-10с);
- декремент затухания (обычно = 10);
X(t)
- изменение координаты стенки цилиндра
в поперечном сечении;
K![]() 1=1/C(P),
С(р) - жесткость цилиндра, зависящая
от измеряемого даления Р;
Fв(t)
- возбуждающая сила катушки 2.
1=1/C(P),
С(р) - жесткость цилиндра, зависящая
от измеряемого даления Р;
Fв(t)
- возбуждающая сила катушки 2.
Сила Fв(t) - периодическая и зависит только от времени (т.к. магнитные потоки катушек 2 и 3 d каждый момент времени постоянны, т.е. Ф = const). Необходимый фазовый сдвиг (Fв(t) по отношению к равный (это следует из фазочастотных характеристик колебательного звена), обеспечивается фильтрами в тракте усиления и преобразования сигнала от катушки 3 к катушке 2 (на рис.3 не показано).
Передаточная функция ДДГ для линейной зоны имеет вид:
![]()
где к = k1 k2 ky ko- число витков катушки 3, ky, ko - коэффициенты усиления соответственно усилителя А1 и ограничителя; kf – коэффициент, характеризующий электромагнитную силу катушки 2
Для возникновения колебаний систему делают неустойчивой, что достигается при kkf > 2T. Рост амплитуды колебаний ограничивается ограничителем.
Зависимость между измеряемым давлением Р и частотой f имеет вид:
![]()
Где
![]()
0 =0 (m,n,R,L,h,) - частота колебаний резонатора при Р = 0;
R,L,h - средний радиус, длина и ширина стенки резонатора;
Е,, - модуль упругости, плотность и коэффициент Пуассона цилиндра;
n- число волн, укладывающихся по окружности цилиндра;
m - число продольных полуволн;
0, 1 - безразмерные величины, являющиеся функциями перечисленных параметров.
Для большинства датчиков ДДГ f = 4500 Гц, а сигналы частоты представляют собой прямоугольные импульсы положительной полярности, выдаваемые в устройство ввода вычислителя через согласующее устройств!! (на рис.З) - блок, следующий за ограничителем.
Особенностью ДДГ является отсутствие в них термостатироавания. Температурная коррекция сигналов осуществляется самим вычислителем по информации с текущей температуре в ДДГ. Датчик температуры ДДГ -обычный гермодиод (1 на рис.3), включенный в мостовую схему. График сигнала температуры изображен на рис.3 рядом с обозначением усилителя А2.
Следует отметить, что зависимость P(f) в приведенном выше приближенном виде в вычислителе не используется. Вместо нее расчет давления производится по более сложной точной зависимости, аппроксимированной на 16-ти интервалах полиномами пятой степени:
р = ko + k1f + k2f2 + k3f3 + k4f4 + k5f5.
Коэффициенты "k" определяются индивидуально для каждого датчика при калибровке.
Точность ДДГ достаточно велика и характеризуется значениями:
• для ДДГ Pст погрешность составляет (1 -2)-10-4;
• для ДДГ Рп погрешность при Рп > 1000 мм.рт.ст. достигает 10-3.