

ВХОДЫ И ВЫХОДЫ СИСТЕМЫ
Входы системы — различные точки приложения влияния (воздействия) внешней среды на систему называются
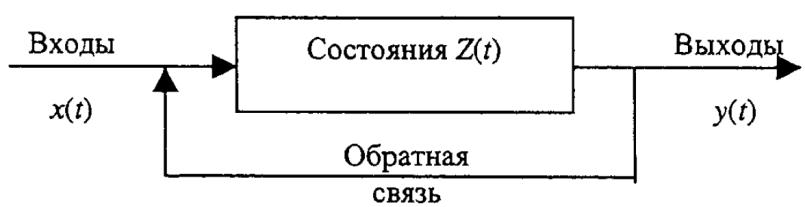
входами Xi системы.
Входами системы являются информация, вещество, энергия, которые подлежат преобразованию.
Входные воздействия, изменяющиеся с течением времени, образуют входной процесс. Входной процесс можно задать, если каждому моменту времени поставить в соответствие, по определенному правилу, входное воздействие.
182
Обобщенным входом X называют некоторое (любое) состояние всех г входов системы, которое можно представить в виде вектора:
X = (х1 х2, хз , … , хk , … , хr).
Выходы системы — различные точки приложения влияния (воздействия) системы на внешнюю среду
называются выходами уj системы.
Выход системы — это результат преобразования информации, вещества и энергии.
Выходные величины изменяются с течением времени, образуя выходной процесс.
183
Обратная связь
Обратная связь — то, что соединяет выход со входом системы и используется для контроля за изменением выхода.
Элементы системы управления
184
Ограничения системы — то, что определяет условия реализации процесса (процесс — последовательность операций по преобразованию чего-либо, т.е. то, что преобразует вход и выход).
Ограничения бывают внутренними и внешними. Одним из внешних ограничений является цель функционирования системы. Примером внутренних ограничений могут быть ресурсы, обеспечивающие реализацию того или иного процесса.
185
ДВИЖЕНИЕ (ФУНКЦИОНИРОВАНИЕ) СИСТЕМЫ
Движение системы — процесс последовательного изменения состояния системы.
Вынужденное движение — движение системы под влиянием внешней среды, которое приводит к изменению ее состояния. Вынужденное движение (пример) — перемещение ресурсов под действием приказа (поступившего в систему извне).
Собственное движение — движение системы без воздействия внешней среды (только под действием внутренних причин).
Собственным движением человека будет его жизнь как биологического (а не общественного) индивида, т.е. питание, сон, размножение.
186
Рассмотрим зависимости состояний системы от функций (состояний) входов, переходов, выходов системы.
Состояние системы в любой момент времени I зависит от
функции ее входов (состояния входов) Х(t).
Z(t) = FC [X(t)].
Состояние системы Z(t) в любой момент времени t также зависит от предшествующих ее состояний в моменты
Z( t-1 ), Z( t-2 ) , … т.е. от функций состояний (переходов):
Z( t ) = FC [X(t), Z(t - 1), Z(t – 2 ), ...],
187
Статические системы
где Fс — функция состояния (переходов) системы.
Связь между функцией входа Х(t) и функцией выход Y(t) системы, без учета предыдущих состояний, можно представить в виде:
Y(t) = FB [X(t)],
где FB — функция выходов системы.
Система с такой функцией выходов называется
статической.
188
Динамические системы
Если же система зависит не только от функций
(состояний) входов Х(t), но и от функций состояний
(переходов) Z(t -1), Z(t – 2), …, то
Y(t) = FB [X(t), Z(t), Z(t- 1 ), ...].
Системы с такой функцией выходов называются динамическими (или системами с поведением).
189
Уравнением переменных состояний
В зависимости от характера математических свойств функций входов и выходов систем различают системы дискретные и непрерывные.
Для непрерывных систем выражения (1.6) и (1.7) запишутся в виде:
d Z(t)
------- = FC [X(t), Z(t)]; d t
Уравнение определяет состояние системы и называется
уравнением переменных состояний системы.
190
Функции FC (функция состояний (переходов) системы) и FB (функция выходов) учитывают не только текущее состояние Z(t), но и предыдущие состояния Z(t-1), Z(t- 2) , Z ( t- v) входов системы.
191