

Малышев Вычислительная математика EQ3
.pdf31
В общем виде кусочно-полиномиальные функции представляются следующим образом:
P(x) = Pi (x), xi ≤ x ≤ xi + 1, i = 0, 1, ... , k – 1 – полиномы для каждого отрезка;
Pi(j)(xi) = Pi + 1(j)(xi), j = 0, 1, ... , i – 1, – непрерывность в точках соприкосновения (одинаковость производных соседних полиномов в узлах),
где i = 1, ... , k – 1.
Точки x1, ... xk – 1, которые делят сегмент [a, b] на k подсегментов, называются точками склеивания, а точки воспроизводимой кривой, соответствующие этим значениям x – узлами. Для удобства принимают x0 = a,
xk = b.
Функция Sn,ν (x) называется сплайном степени n класса Cm (0≤ m ≤ n; ν = n – m) с m непрерывными производными и с узлами на сетке : a = x1 < < ... < xi < ... < xN = b, если:
а) на каждом отрезке [xi, xi + 1], i = 1, ... , N – 1, функция Sn,ν(x) является многочленом степени n, т. е.
n
Sn,ν (x) = Pni (x) = ∑ aki (x − xi )k =a0 + a1 (x − xi ) + a2 (x − xi )2 +....
k =0
для x [xi, xi + 1];
б) Sn,ν(x) Cm [a, b].
Производные сплайна Sn,ν(p)(x) порядка выше m и до n включительно, вообще говоря, имеют конечные разрывы в точках xi, p = 2, ... , N – 1 – порядок производной, n – степень полинома (сплайна). Индекс ν = n – m указывает на число таких производных. Число ν часто называют дефектом сплайна.
3.3.1. Пространство сплайнов
Множество сплайнов, удовлетворяющих определению, обозначается через Sn,ν( ). Каждое звено сплайна зависит от n + 1 коэффициентов, определяющих его многочлен. Общее число коэффициентов (n + 1)(N – 1). Но в точках xi, i = 2, ... , N – 1 должны выполнятся условия непрерывности первых m = n – ν производных сплайна, которые дают (n – ν + 1) Х (N – 2) линейных уравнений для коэффициентов api. Таким образом, остается число независимых коэффициентов
= (n + 1)(N – 1) – (n + 1)(N – 2) + ν (N – 2) = n + 1 + ν (N – 2). Это есть раз-
мерность пространства сплайнов Sn,ν( ).
32
Задачи аппроксимации сплайнами – это, с одной стороны, те же задачи, что и для многочленов, а с другой – специфические проблемы, рассматриваемые только в теории сплайнов.
К первым относится задача интерполяции. Для сплайнов нечётных степеней, например первой и третьей, характерна схема, при которой узлы интерполяции и узлы сплайна совпадают. В случае чётных степеней, например параболических сплайнов, узлы не совпадают, а чередуются между собой.
Погрешность аппроксимации сплайнами характеризуется так же, как и в случае многочленов, нормой остаточного члена ||Rn,ν(x)|| = ||Sn,ν(x) –
– f(x)||. Она снова зависит от того, к какому классу: Cm[a, b] или C(m)[a, b] принадлежит функция f(x), и от шагов hi сетки .
Уменьшение шага ведёт к увеличению числа узлов. В случае многочленов это связано с возрастанием их степени. Степень же сплайна не изменяется.
При переходе от аппроксимации многочленами к аппроксимации сплайнами преследуют две цели [4]. Первая, это улучшение качества приближения: при одинаковых вычислительных затратах абсолютные погрешности аппроксимации сплайнами меньше, чем погрешности аппроксимации многочленами, а при одинаковых погрешностях уменьшается объём вычислений. Сплайны позволяют избежать осцилляций. Для сходимости аппроксимации к аппроксимируемой функции предъявляются более слабые требования, чем в случае многочленов. Вторая цель – резкое уменьшение вычислительных трудностей как при построении алгоритмов решения задач, так и при дальнейшей работе с аппроксимантами, которые на каждом звене представляют собой многочлены невысоких степеней или иные элементарные функции. С этой точки зрения наиболее простыми оказываются задачи локальной аппроксимации. В таких случаях решения выписываются обычно в явном виде. Нелокальные задачи сводятся к решению систем линейных уравнений размерности порядка N с разреженными (ленточными) матрицами, для которых существуют эффективные алгоритмы. В этом заключается одно из преимуществ сплайнов перед многочленами высоких степеней, где матрицы заполненные [4].
При работе со сплайнами можно использовать либо кусочномногочленное представление, либо представление через базисные функции. В первом случае достигается наибольшая экономия в числе арифметических операций, но зато приходится хранить большой объём информации о многочленах – (n + 1)(N – 1) чисел. Во втором случае достаточно хранить dn,ν = n + 1 + ν (N – 2) коэффициентов сплайна, но при этом увели-
33
чивается число арифметических операций. Следует предупредить, что не все базисы пригодны для организации вычислений. Большей частью их применение приводит к быстрому накоплению погрешностей округления. В частности, при использовании усечённых степенных функций затруднения возникают при вычислении второй суммы при больших N. От этого недостатка свободен лишь базис, состоящий из функций с конечными носителями (отличных от нуля на конечном отрезке), так называемых В-сплайнов.
3.3.2. Сплайны первой степени
Интерполяция. Сплайны первой степени S1(x) класса C на сетке
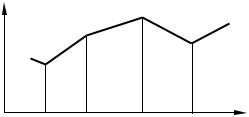
– это кусочно-линейные функции. (Здесь и далее второй индекс ν сплайна, если он равен единице, опускается). Пусть в узлах сетки заданы значения функции fi = f(xi). Интерполяционный сплайн S1(x) определяется условиями S1(xi) = fi, i = 1, …, N. Геометрически он представляет собой ломаную, проходящую через точки (xi, fi) (рис. 3.3). Между соседними узлами реализуется линейная интерполяция. Согласно [1, 4] при x [xi, xi + 1] сплайн будет иметь вид:
S1 ( x) = (1 − u) fi + ufi +1 ; u = (x − xi ) / hi .
S1(x)
xi – 1 xi xi + 1 xi + 2 x
Рис. 3.3. Сплайн первой степени
Если в исходные данные fi внести возмущения δfi ≤ δ, то сплайн изменится в пределах δ. Возмущение его производной оценивается значением δ/hi и растет с уменьшением hi.
Погрешность интерполяции. Пусть f(x) C(2)[a, b], тогда
|
|
S ( p) ( x) − f |
( p ) ( x) |
|
|
|
|
|
|
≤ K |
h |
2− p |
|
|
|
f ′′( x) |
|
[xi , xi+1 |
] |
, p = 0,1, |
|||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
1 |
|
|
[x , x |
|
|
] |
|
|
p i |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
i i+1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Где K0 = 1/8, K1= 1/2. Чтобы записать оценки для всего отрезка [a, b], |
|||||||||||||||||||||||||
достаточно заменить hi на H, а |
|
|
|
... |
|
[x , x |
] |
на |
|
... |
|
: |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
i |
i+1 |
|
|
|
|
|
|
|
|
|
|
|
|

34
S ( p ) ( x) − f ( p) ( x) |
|
≤ K |
p |
H 2− p |
|
|
|
f ′′( x) |
|
, p = 0,1. |
|
|
|
|
|||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Интерполяция с заданной точностью. На практике обычно требуется осуществить интерполяцию с некоторой заданной точностью. Эта задача решается путем выбора сетки на отрезке [a, b] с учетом свойств интерполируемой функции. Точность интерполяции определяется гладкостью функции внутри отрезков [xi, xi + 1]. Поэтому точки, в которых функция имеет особенности, например, разрывы производных, следует включить в число узлов интерполяции.
Оценка при p = 0 дает возможность определить максимальный шаг
сетки для обеспечения заданной точности |
|
S1 ( x) − f ( x) |
|
≤ ε . |
Для |
этого |
|||||||||
достаточно выбрать шаг h так, чтобы h |
2 |
|
|
|
≤ 8ε , т. е. |
|
|
|
|
|
|
|
|||
|
f (x) |
|
h = |
8ε / |
|
f |
( x) |
|
, |
||||||
|
|
′′ |
|
|
|
|
|
|
|
′′ |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и требуемая точность обеспечивается, например, на равномерной сетке с шагом h. При этом число узлов, как правило, будет очень завышенным.
С помощью оценки при p = 0 можно строить более экономичные по
числу шагов сетки, если учитывать значения |
|
f ( x) |
|
[x , x |
] на каждом от- |
||||||||
|
|
|
|
|
|
|
|
|
|
′′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i i+1 |
|
резке. Так, если узлы интерполяции выбирать из условий |
|
||||||||||||
h2 |
|
|
|
f ′′( x) |
|
[xi ,xi +1 |
] |
= 8ε , |
|
|
|||
|
|
|
|
|
|||||||||
i |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
то задача будет решена с числом узлов, вообще говоря, меньшим, чем при равномерном разбиении.
Пусть, например, функция f ′′( x) монотонно убывает на [a, b]. Если
узел ti |
найден, то в силу монотонности |
|
f ( x) |
|
|
= |
f ( xi ) |
, и можно |
|||
|
|
|
|
|
′′ |
|
[xi , xi +1 ] |
|
′′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вычислить hi. Если |
f ( xi ) |
≠ 0 , то полагаем xi + 1 |
= xi + hi. Если |
f ( xi ) |
= 0 , |
||||||
|
|
′′ |
|
|
|
|
|
′′ |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
то xi + 1 = b. Начиная этот процесс от левого конца отрезка [a, b], последовательно находим все узлы сетки. Если f ′′( x) монотонно возрастает, то
построение следует начинать с правого конца отрезка [a, b]. Алгоритм можно применять, если функция f ′′( x) кусочно-монотонна. Алгоритм выбора узлов сплайна, при котором не требуется выделять участки монотонности функции f ′′( x) , будет изложен ниже.
Аппроксимация сплайнами первой степени. Аналогом асимптотиче-
ски наилучшего равномерного приближения многочленом первой степени является следующая аппроксимация сплайном:
35
S (x) = (1 − u) f |
|
|
− |
1 |
max(h2 |
|
, h2 ) f ′′ |
+ u |
f |
|
− |
1 |
|
max(h2 |
, h2 |
) f |
′′ |
|
, |
|||||||||||||||||||||
i |
|
|
i +1 |
|
|
|
|
|||||||||||||||||||||||||||||||||
1 |
|
|
|
|
|
16 |
|
|
|
i −1 |
i |
|
i |
|
|
|
|
|
16 |
|
|
i |
|
|
i +1 |
|
|
i +1 |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
x [xi , xi +1 ], h−1 = hN = 0 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Погрешность аппроксимации |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
S ( x) − f ( x) |
|
|
|
≤ |
|
1 |
H 2 |
|
|
|
f ′′( x) |
|
|
|
|
+ H |
|
|
|
f ′′′( x) |
|
|
|
|
|
|
, |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
1 |
|
|
[xi , xi+1] |
16 |
|
i |
|
|
|
|
|
|
|
[x |
, x + ] |
|
|
|
i |
|
|
|
|
[x |
, x + |
|
] |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
i |
1 |
|
|
|
|
|
|
|
|
|
i |
i 1 |
|
|
|
|
||||||||
где Hi |
= max(hi – 1, hi, hi + 1). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Производные можно заменить конечно-разностными аппроксимациями (см. п. 5.2 – 5.4). При этом будет внесена погрешность порядка Θ(H2). Отсюда ясно, что главный (первый) член погрешности аппроксимации не изменится.
3.3.3. Кубические сплайны
Кубический сплайн склеивается из полиномов третьей степени, которые для i-го участка записываются так [1 – 5]:
y = ai (x – xi)3 + bi (x – xi)2 + ci (x – xi) + di.
Для всего интервала будет соответственно n кубических полиномов, отличающихся коэффициентами ai, bi, ci, di. Чаще всего узлы при сплайновой интерполяции располагают равномерно, т. е. xi + 1 – xi = const = h (хотя это необязательно).
Необходимо найти четыре коэффициента при условии прохождения каждого полинома через две точки (xi, yi) и (xi + 1, yi + 1), следствием чего являются следующие очевидные уравнения:
начальная точка x = xi; yi = di, |
i = 0, 1, 2, …, n – 1, |
конечная точка x = xi + 1; yi + 1 + ai h3 + bi h2 + ci h + di, |
i = 0, 1, 2, …, n – 1. |
Найти все коэффициенты из этих уравнений нельзя, т. к. условий меньше, чем искомых параметров. Поэтому указанные условия дополняют условиями гладкости функции (т. е. непрерывности первой производной) и гладкости первой производной (т. е. непрерывности второй производной) в узлах интерполяции. Математически эти условия записываются как равенства соответственно первой и второй производных в конце i-го и в начале (i + l)-гo участков.
Так как
y′ = 3ai (x − xi )2 + 2bi ( x − xi ) + ci и y′′ = 6ai (x − xi ) + 2bi ,
|
|
|
|
|
36 |
|
то |
|
|
|
|
|
|
|
3a h2 |
+ 2b h + c = c |
|
, i = 0, 1, 2, . . ., n – 2. |
||
|
i |
i |
i |
i +1 |
|
|
( y (xi +1 ) в конце i-го участка равна y ( xi +1 ) в начале (i + l)-гo) |
||||||
′ |
|
|
|
|
|
′ |
|
6ai h + 2bi = 2bi +1 , i = 0, 1, 2, . . ., n – 2, |
|||||
′′ |
|
|
|
′′ |
||
( y |
( xi +1 ) в конце i-го участка равна |
y |
(xi +1 ) в начале (i + l)-гo). |
|||
Получилась система линейных уравнений (для всех участков), содержащая 4n – 2 уравнения с 4n неизвестными (неизвестные a1, a2, . . ., an, b1, . . ., dn – коэффициенты сплайнов). Для решения системы добавляют два граничных условия одного из следующих видов (чаще применяют 1):
1) y′′( x0 ) = y′′( xn ) = 0; |
3) y′( x0 ) = y′( xn ) = 0; |
2) y′( x0 ) = g0 ; y′(xn ) = gn ; |
4) y′( x0 ) = y′( xn ); y′′(x0 ) = y′′( xn ). |
Совместное решение 4n уравнений позволяет найти все 4n коэффициента.
Для восстановления производных можно продифференцировать на каждом участке соответствующий кубический полином. В случае необходимости определения производных в узлах существуют специальные приемы, сводящие определение производных к решению более простой системы уравнений относительно искомых производных второго или первого порядка. К важным достоинствам интерполяции кубическими сплайнами относится получение функции, имеющей минимальную возможную кривизну. К недостаткам сплайновой интерполяции относится необходимость получения сравнительно большого числа параметров. Вычислительный пример рассматривать не будем, что связано с большим объемом вычислений, которые нецелесообразно проводить вручную.
3.3.4. Эрмитовы кубические сплайны
Интерполяция
В узлах сетки заданы значения функции и ее производной fi = f(xi), fi′ = f ′(xi), i = 1, …, N. Требуется найти кубический сплайн S3,2(x) такой, что
S3,2(xi) = fi; S′3,2(xi) = fi′, i = 1, …, N.
Это эрмитов кубический сплайн [2]. Его первая производная непрерывна, а вторая и третья в общем случае разрывны в узлах сетки. График представляет собой гладкую линию.
37
На отрезке [xi, xi + 1] реализуется эрмитова интерполяция кубическим многочленом. Звено сплайна имеет вид
|
S |
3, 2 |
( x) = f ϕ (u) + f |
|
ϕ |
(u) + h |
f |
′ϕ (u) + f ′ ϕ |
(u) , |
|||||||||||||||
|
|
i 1 |
i +1 2 |
|
|
|
|
|
i i |
3 |
|
|
i +1 4 |
|
||||||||||
где ϕk(u) – функции (см. табл. 2.1). Это локальная интерполяция. |
||||||||||||||||||||||||
Возмущения исходных данных δfi ≤ δ , |
δfi′≤ δ′ вызывает у сплайна и |
|||||||||||||||||||||||
его производных возмущения порядка Θ(δhi− p + δ′hi− p +1 ) . |
|
|||||||||||||||||||||||
Погрешность интерполяции. Для функций |
f(x) C(2)[a,b] имеем |
|||||||||||||||||||||||
оценки, которые для сплайнов дают |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
S ( p ) ( x) − f ( x) (x) |
|
≤ K |
h2− p |
|
|
f ′′( x) |
|
|
x , |
|
|
, p = 0, 1, |
||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
3, 2 |
|
|
|
|
|
|
p i |
|
|
|
|
|
|
x |
|
|
||||||
где K0 = 1/16; K1 = 0,2515. |
|
|
|
|
|
|
|
|
|
|
|
|
i |
i +1 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Для функции f(x) C(4) [a, b] получаем |
|
|
|
|
|
|
|
|
||||||||||||||||
|
S p |
(x) − f ( p ) ( x) |
|
≤ K |
h4− p |
|
|
f IV |
( x) |
|
|
|
|
, p = 0, 1, 2, |
||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
3, 2 |
|
|
|
|
|
|
p i |
|
|
|
|
|
|
|
|
x , x |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i i +1 |
|
|
|
||
где K0 = 1/384; K1 = 
 3 / 216 ; K2= 1/12.
3 / 216 ; K2= 1/12.
Эти оценки остаются справедливыми и для функций с кусочнонепрерывными вторыми и третьими производными, если точки их разрыва включаются в число узлов интерполяции. В инженерной практике к такому классу относятся часто используемые гладкие кусочно-аналитические функции.
Из полученных формул получаются оценки, справедливые на всем
отрезке [a, b], заменой hi на H и ... на ... .
xi , xi +1
Интерполяция с заданной точностью. Задача интерполяции с точ-
ностью
R( x) = S3, 2 ( x) − f ( x) ≤ ε, x [a, b]
решается двояко. Шаги равномерной сетки для функций f(x) C2 [a, b] можно определить:
h≤ 4
 ε /
ε / 
 f ′′( x)
f ′′( x)
 .
.
Ашаги для функций f(x) C4 [a, b]:
h ≤ 4 384ε /
384ε / 
 f IV ( x)
f IV ( x)
 .
.

38
Для построения неравномерных сеток при интерполяции функций f(x) C(2) [a, b] можно использовать алгоритм, приведенный в п. 4. Для функций f(x) C(4) [a, b] в этом алгоритме нужно всюду заменить f ″(x) на f IV(x).
Ниже рассмотрен другой алгоритм построения неравномерной сетки, не требующий вычисления производных f ″(x) или f IV(x). Он достаточно трудоемок, но зато позволяет получать сетки с минимальным числом узлов.
На отрезке [a, b] возьмем множество точек (контрольных) τi = a + jδx, j = 0, …, и предположим, что остаточный член интерполяции в них удовлетворяет условию
R(τ j ) = S3, 2 (τ j ) − f (τ j ) ≤ ε1 < ε .
Выясним, когда на основании этого можно утверждать, что заданная точность обеспечивается на всем отрезке [a, b].
Построим сплайн первой степени S1(x), интерполирующий функцию R(x) по значениям R(τj). Поскольку R(τ j ) ≤ ε1 , то S1 ( x) ≤ ε1 на всем отрезке [a, b]. Отсюда ясно, что достаточно добиться выполнения неравенства
δR(x) = S1 (x) − R( x) ≤ ε − ε1 ,
и тогда условие заданной точности будет выполнено.
Согласно формуле погрешности интерполяции сплайна первой сте-
пени
δR( x) ≤ 0,125(δx)2 
 R′′( x)
R′′( x)
 .
.
Если функция f(x) C2[a, b], то учитываем, что
|
|
R′′( x) |
|
≤ |
|
S ′′ |
(x) |
|
+ |
|
f ′′(x) |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
3, 2 |
|
|
|
|
|
|
и на этом основании получаем |
|
|
|
|
|
|
||||||
δR(x) ≤ 3−1 (δx)2 
 f ′′(x)
f ′′(x)
 .
.
На шаги δx налагаем ограничение
δx ≤ 
 3(ε − ε1 ) /
3(ε − ε1 ) / 
 f ′′(x)
f ′′(x)
 .
.
При этом ограничении исходные неравенства будут выполнены. Рассмотрим узловые моменты алгоритма. Ввиду локальности эрми-
това сплайна задача состоит в последовательном определении по возмож-

39
ности максимальных размеров каждого шага сетки . Предполагается, что известна оценка 
 f ′′(x)
f ′′(x)
 ≤ A . Зададим значение ε1 и по приведенным выше
≤ A . Зададим значение ε1 и по приведенным выше
формулам определим максимально допустимый шаг δx и шаг h равномерной сетки, обеспечивающей точность ε интерполяции: δx = 
h = 4
 ε / A .
ε / A .
Пусть найден узел xi – 1.Узел xi находим путем последовательных
приближений |
x(k ) , гдеk = 0, 1, ... . В качестве нулевого приближения при- |
||||||
|
|
i |
|
|
|
|
|
нимаем x(0) |
= x |
+ h |
. Если оказалось, что x(0) |
> b , полагаем |
x(0) |
= b . |
|
i |
|
i −1 |
i − 2 |
i |
|
i |
|
Каждое последующее приближение x( k ) выбирается из некоторого допус- |
|||||||||
|
|
|
|
|
|
|
i |
|
|
тимого отрезка α( k ) , β(k ) . Для x(1) |
устанавливаем α(1) = x |
+ h , β(1) = b . |
|||||||
|
|
|
|
i |
|
|
i −1 |
|
|
Приближение |
x(k ) |
определяется следующим образом. По значениям |
|||||||
|
i |
|
|
|
|
|
|
|
|
′ |
(k −1) |
) , |
′ |
(k −1) |
) |
строится звено кубического сплай- |
|||
f ( xi −1 ) , f ( xi −1 ) , f (xi |
|
f ( xi |
|
||||||
на. Подсчитываются его уклонения ε′j |
от f(x) в точках τ j = xi −1 + jδx , j = 1, |
||||||||
…, mk и находится ε = max ε′j . Возможны три случая. |
|
||||||||
1. ε < ε1. Экстраполируем звено сплайна вправо и вычисляем его
уклонения от f(x) в точках τ = x( k −1) + lδx , l = 1, 2. …, lk, до тех пор, пока |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
i |
i |
|
|
|
|
|
|
|
|
R(τ ) |
|
≤ ε − ε , а τ α(k ) , β( k ) |
. В качестве k-го приближения принима- |
||||||||||||||
|
|
|||||||||||||||||
|
|
l |
|
1 |
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
ем точку x(k ) = x(k −1) |
+ l |
k |
δx . Устанавливаем границы допустимого отрезка |
|||||||||||||||
|
|
|
|
|
i |
i |
|
|
|
|
|
|
|
|
|
|
|
|
для последующего приближения равными α( k +1) |
= x(k −1) , |
β(k +1) = β(k ) . |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
2. ε = ε1. |
Принимаем x(k ) |
= x(k −1) + δx . |
Если |
оказалось, |
что |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
i |
i |
|
|
|
|
|
|
|
x(k ) ≥ β(k ) , полагаем |
x(k ) |
= β(k ) . |
Корректируем границы допустимого от- |
||||||||||||||
|
i |
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
резка α( k +1) = x( k −1) , |
β(k +1) |
= β(k ) . |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
3. ε > ε1. |
Принимаем |
x(k ) = α(k ) + (x(k −1) − α(k ) ) ε / ε , |
если |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
i |
i |
|
|
1 |
|
|
|
|
|
|
|
x(k ) = α(k ) + (x(k −1) |
|
|||||||||||||
|
|
ε / ε ≤ 1/ 2 . В противном случае |
− α( k ) ) / 2 . Изменяем |
|||||||||||||||
1 |
|
|
|
|
|
|
|
|
|
i |
i |
|
|
|
|
|
||
границы допустимого промежутка α( k +1) = α(k ) , |
β(k +1) |
= x(k −1) . |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
||
Нетрудно убедиться, что процесс последовательного приближения сходится, т. к. допустимый отрезок α( k ) ,β(k ) на каждом шаге уменьшает-
ся, и как только он становится меньшим δx , можно считать, что узел xi определен.
40
Основные вычислительные затраты этого алгоритма приходятся на
определение значений f (τ j ), S3, 2 (τ j ) |
и |
S3, 2 (τ j ) − f (τ j ) |
. Их объем зави- |
сит от поведения второй производной |
f ( x) , от того насколько точно взято |
||
|
′′ |
||
значение A и как выбрано ε1. Очевидно, что большему шагу δx соответствует меньшее значение ε1, т. е. уменьшение числа контрольных точек возможно только за счет уменьшения допустимого уклонения S3,2(x) от f(x) в этих точках. На практике рекомендуется принимать значения ε1 = 0,9 ε. В этом случае δx =  и общее число контрольных точек m = (b − a) / δx . Отметим, что конечный результат практически не зависит
и общее число контрольных точек m = (b − a) / δx . Отметим, что конечный результат практически не зависит
от того, насколько точно устанавливается оценка |
|
f (x) |
|
≤ A . |
|
|
′′ |
|
|
В случае интерполяции функции f ( x) C (4) [a, b] |
при p = 0 следует |
|||
δR( x) ≤ 96−1 (δx)2 h2 
 f IV (x)
f IV (x)
 ≤ (δx)2
≤ (δx)2 
 ε
ε 
 f IV (x)
f IV (x)
 / 24 .
/ 24 .
Чтобы выполнялось условие, следует положить
δx ≤ 4 24(ε − ε1 )2 / ε
24(ε − ε1 )2 / ε 
 f IV ( x)
f IV ( x)
 .
.
Для применения алгоритма нужно знать оценку f IV ( x) ≤ A.
3.3.5. Аппроксимация с помощью сплайна
Сплайны лишь недавно стали использовать в вычислительной математике. Однако в машиностроительном черчении они фактически применяются уже давно, т. к. сплайн – это в переводе не что иное, как «гибкая линейка», которую деформируют так, чтобы по ней можно было провести кривую через заданные точки (xi, уi). Сплайн (или сплайн- функции) – функция с кусочной структурой и повторяющимся на каждом звене (отрезке) строением, но с различными значениями параметров.
Кубический сплайн – это группа сопряженных кубических многочленов, в местах сопряжения которых первая и вторая производные непрерывны. Чтобы построить кубический сплайн, необходимо задать коэффициенты, которые единственным образом определяют кубический многочлен в промежутке между данными точками. Например, в случае, представленном на рис. 3.4, необходимо задать все кубические функции q1(х),
q2(х), . . ., qm(х).