книги из ГПНТБ / Электрические измерения. Общий курс учебник
.pdfКонструкция, показанная на рис. 36, в, представляет собой ферродннамический механизм с внутрирамочным возбуждением. В та кой системе поток, создаваемый неподвижной катушкой 1, замы кается через сердечник 2 и ярмо 3 из ферромагнитного материала. Подвижная катушка 4 охватывает сердечник и может свободно вра щаться вокруг него. Такая конструкция имеет незначительные по токи рассеяния, обладает малым собственным потреблением и ис пользуется для создания приборов небольших габаритов.
На рис. 36, г показан механизм с углом шкалы 240°. Такая шкала при малых поперечных размерах имеет большую длину, что увели чивает точность отсчета.
Рис. 36. Конструкции ферродшіамических измеритель ных механизмов
Вращающий момент ферродинамического измерительного меха низма возникает в результате взаимодействия подвижной катушки с током и потока, создаваемого неподвижными катушками. Если магнитное поле в воздушном зазоре радиально, то для определения мгновенного значения вращающего момента Mt можно воспользо ваться выражением (55). При этом будем иметь
Mt = |
Bts2w2i2, |
где Bt — мгновенное значение |
магнитной индукции в воздушном |
зазоре; s2, w2, і2 — соответственно площадь, число витков и ток под вижной катушки.
Из-за своей инерции подвижная часть будет реагировать не на мгновенное значение момента, а на среднее, которое можно опреде
лить так: |
|
т |
|
M = у \ Mt dt = Bs2wJ2 cos ( £ ? / 3 ) , |
(65) |
h |
|
80
где В п І2 — действующие значения соответственно индукции в воз душном зазоре и тока в подвижной катушке.
Если допустить, что при работе используется линейный участок кривой намагничивания материала сердечника, то можно написать
где к л — коэффициент, зависящий от выбора системы единиц и кон структивных параметров измерительного механизма.
Подставляя полученное для В значение в выражение (65) и пре
небрегая углом потерь, т. е. считая, |
что /, {В, І2) = £ (А» -А)» |
получим |
|
M = k1s2w2I1I2cos(I1, |
І2). |
Если противодействующий момент создается при помощи упру гих элементов, то для статического равновесия
k^wj\12cos (А,/2 ) =Wa,
откуда
|
|
а = klj2 |
cos (Ii, |
/ 3 ) , |
|
где |
к — коэффициент, определяемый конструкцией измерительного |
||||
механизма |
и выбором Системы |
единиц. |
|
|
|
|
Ферродинамические приборы используются чаще всего как ста |
||||
ционарные, |
относительно малоточные |
приборы (классов |
точности |
||
1,5 |
и 2,5) для измерений в цепях переменного тока с частотой 10 Гц — |
||||
1,5 |
кГц. Однако надо отметить, что применение пермаллоя для сер |
||||
дечников и |
высокая культура |
технологии производства |
позволили |
||
создать переносные ферродинамические приборы высокой точности (класса 0,5), предназначенные для измерений в цепях переменного и постоянного тока.
Все же применение ферродинамических приборов для измерений в цепях постоянного тока следует считать пока исключением, и по
этому в |
дальнейшем |
мы будем рассматривать |
их |
работу только |
|
в цепях |
переменного тока. |
|
|
|
|
Электростатические |
измерительные механизмы. |
В |
электростати |
||
ческих |
измерительных |
механизмах вращающий |
момент возникает |
||
в результате взаимодействия двух систем заряженных |
проводников, |
||||
одна из которых является подвижной. Из принципа работы электро статических измерительных механизмов следует, что непосредственно они могут измерять только напряжение, т. е. применяться в вольт метрах. В электростатических измерительных механизмах отклоне ние подвижной части связано с изменением емкости. В настоящее время практическое применение находят электростатические меха низмы, в которых изменение емкости происходит или вследствие изменения активной площади пластин или при изменении расстояния между пластинами. Первый тип механизмов используется главным образом для создания вольтметров на низкие напряжения (в десятки и сотни вольт), а второй — для киловольтметров.
81
На рис. 37 показан принцип устройства механизма с изменяю щейся активной площадью пластин. Неподвижная часть этих меха^
низмов состоит из одной, двух или большего числа камер 7. |
Увеличи |
||||||||
|
|
вая число камер, можно повысить чувствитель |
|||||||
|
|
ность. Каждая камера представляет собой две |
|||||||
|
|
металлические пластины с воздушным зазором |
|||||||
|
|
между ними. В зазоры свободно входят тонкие |
|||||||
|
|
алюминиевые пластины 2 подвижной части. |
|||||||
|
|
Если к подвижным |
и неподвижным пластинам |
||||||
|
|
подвести |
измеряемое |
напряжение, то |
они |
ока |
|||
|
|
жутся |
|
заряженными |
противоположными |
по |
|||
|
|
знаку зарядами, в результате чего под дей |
|||||||
Рис. 37. |
Электроста |
ствием электростатических |
сил притяжения по |
||||||
движные |
пластины |
|
будут |
стремиться войти |
|||||
тический |
измеритель |
|
|||||||
ный механизм с изме |
внутрь |
камер. Поворот подвижных |
пластин, |
||||||
няющейся |
"активной |
жестко |
укрепленных |
на оси 3, вызовет закру |
|||||
площадью |
электродов |
чивание упругих элементов (обычно растяжек), |
|||||||
|
|
создающих противодействующий момент. |
При |
||||||
равенстве вращающего и противодействующего моментов подвижная
часть |
остановится, |
и по положению указателя на шкале можно |
будет |
определить |
измеряемое напряжение. |
На рис. 38 показан электростатический измерительный |
механизм |
с изменением расстояния между электродами. Он состоит |
из двух |
неподвижных |
пластин |
(электродов) |
1, |
|
|
||||||
между которыми подвешена на тонких |
|
|
|||||||||
металлических |
ленточках |
2 |
подвижная |
|
|
||||||
пластина 3. Подвижный электрод элек |
|
|
|||||||||
трически соединен с одной из непо |
|
|
|||||||||
движных пластин и изолирован от дру |
|
|
|||||||||
гой. |
При |
|
наличии между |
электродами |
|
|
|||||
разности |
потенциалов |
подвижная пла |
|
|
|||||||
стина отталкивается от одноименно за |
|
|
|||||||||
ряженной |
неподвижной |
пластины |
и |
|
|
||||||
притягивается |
к пластине другого зна |
|
|
||||||||
ка. Следует отметить, что направление |
|
|
|||||||||
перемещения пластины 3 не зависит от |
|
|
|||||||||
знака напряжения U. Перемещение по |
|
|
|||||||||
движной пластины посредством тяги 7 |
Рпс . 38.. |
Электростатический |
|||||||||
и мостика |
4 |
передается |
на |
ось 6 |
и |
||||||
стрелку |
5. Противодействующий |
мо |
измерительный механизм с из |
||||||||
менением |
расстояния между |
||||||||||
мент |
в рассматриваемом механизме |
со |
|||||||||
|
электродами |
||||||||||
здается весом подвижной пластины. Это требует установки прибора в такое положение, чтобы при отсутствии
напряжения стрелка стояла на нулевой отметке.
На |
показания |
электростатических приборов почти не влияют |
|||||||
частота |
измеряемого напряжения, |
температура и |
посторонние |
||||||
магнитные |
поля. |
Зато |
в |
очень |
|
сильной |
степени |
сказывается |
|
действие' |
электрических |
полей. |
Вращающий момент, |
действую |
|||||
щий на |
подвижную часть, |
имеет |
небольшую |
величину. Собствен- |
|||||
82
ное потребление приборов лгало, на постоянном токе оно равно нулю.
Эти свойства определяют области применения электростатических вольтметров и особенности их конструкции.
Электростатические вольтметры используются для измерения, напряжений в широком диапазоне частот (20 Гц—30 МГц) в мало мощных цепях, а также в цепях высокого напряжения для измере ния напряжений до десятков и сотен киловольт без применения гро моздких, дорогих и потребляющих большую мощность добавочных сопротивлений. По точности эти приборы соответствуют чаще всего классам 1,0—1,5 — 2,5. Однако они могут быть выполнены и очень точными — класса 0,1 и даже 0,05.
При конструировании электростатических вольтметров предъявляются высо кие требования к качеству изоляции между подвижными и неподвижными электро дами. Д л я уменьшения влияния внешних электрических іюлеіі применяется электростатическое экранирование. В стационарных приборах таким экраном служит сам металлический корпус, а в переносных приборах внутренняя поверх ность корпуса металлизируется, для чего, например, она окрашивается токонроводяіцей краской. Экран соединяется с одним из зажимов прибора, который при измерениях заземляется. Ввиду малого значения вращающего момента в боль шинстве случаев подвижная часть электростатических приборов укрепляется на растяжках и применяется световой отсчет.
Выражение для угла отклонения подвижной части электроста тического измерительного механизма может быть получено на основа нии следующих рассуждений.
Энергия электрического поля системы заряженных тел
Г/72
W — —
е2 '
где С — емкость системы заряженных тел; U — напряжение, при ложенное к ним.
На основании общего выражения (51) для вращающего момента получим
da 2 da
Если противодействующий момент создается при помощи упру гих элементов, то для режима установившегося равновесия можем написать
1 |
U*i~ = |
Wa, |
|
2 |
^ |
/1dart |
' |
откуда
Из выражения (06) следует, что электростатические вольтметры могут применяться для измерений в цепях постоянного и перемен ного тока, так как при изменении полярности напряжения U на правление отклонения подвижной, части не меняется.
83
При линейном приросте емкостп, т. е. если бы = const элект ростатический вольтметр имел бы квадратичную шкалу. Для при ближения характера шкалы к равномерному выбирают соответствую щим образом форму подвижных и неподвижных пластин, т. е. за даются определенным законом изменения емкости с изменением угла поворота. Этот способ позволяет получить практически равномерной шкалу на участке от 15—25 до 100% ее номинального значения.
Индукционные измерительные механизмы. Индукционный изме рительный механизм состоит из одного или нескольких неподвижных электромагнитов и подвижной части, выполненной обычно в виде алюминиевого диска.
Переменные магнитные потоки, направленные перпендикулярно плоскости диска, пронизывая последний, индуктируют в нем вихре вые токи. Взаимодействие потоков с токами в диске вызывает пере мещение подвижной части.
Индукционные измерительные механизмы по устройству делятся на несколько типов. По числу потоков, пересекающих подвижную часть, они могут быть однопоточными и многопоточными.
Однопоточные измерительные механизмы имеют один электромаг нит и подвияшую часть в виде диска, асимметрично расположенного на оси. Такие механизмы, хотя и просты по устройству, но в изме рительной технике в настоящее время не применяются из-за малой величины вращающего момента.
Многопоточные индукционные измерительные механизмы де лятся на два типа — механизмы с бегущим магнитным полем и ме ханизмы с вращающимся полем. В первых поток (амплитудное зна чение) в зависимости от времени перемещается поступательно от полюса к полюсу. В механизмах с вращающимся полем этот поток перемещается по окружности или по эллипсу.
Теорию многопоточных измерительных механизмов рассмотрим примени
тельно к двухпоточному прибору (рис. 39, а). |
|
|
||
Потоки Ф1 и Ф 2 |
в сердечниках 1 и 2, возбуждаемые токами / х и h |
и сдвинутые |
||
по фазе на угол if, |
пересекая диск 3, индуктируют в н е м а . д. с. Ех |
и Е2, отстаю- |
||
|
'' л |
(рис. 39, б). Токи / 1 | 2 |
|
|
іцие от своих потоков на угол |
и / 2 , 2 в диске будут отста |
|||
вать от э. д. с. /?і и Ег на углы |
ах и а,, если диск, кроме активного сопротив |
|||
ления, обладает некоторой индуктивностью. Потоки |
Ф, и Ф„, пронизывающие |
|||
диск 3, а также токи / 1 і 2 и / 2 , 2 |
в диске показаны на рис. 39, в в виде окруж - |
|||
иостей.
Выражение для вращающего момента индукционного механизма можно по лучить из общего уравнения (51) для момента измерительных механизмов. Од нако значительно проще это можно сделать, пользуясь известным соотношением, определяющим взаимодействие потока и тока.
Мгновенное значение момента Mt от взаимодействия потока Ф ^ и потока, созданного током г 1 і 2 в диске,
где с — коэффициент пропорциональности. Если
Ф і / = Ф і т З І п Ш a г ' і , 2 = / ь s m sin (ш/ — у),
84
то |
Л/f = с Ф ] „ ( / і , o„j s i n (of s i n (wt — y). |
Ввиду относительно большого момента инерции подвижной части измери тельного механизма она не будет следовать за изменениями мгновенных значений момента и ее движение будет определяться средним зачением вращающего мо мента M за период переменного тока, т. е.
|
т |
|
т |
|
|
|
|
M— у |
^ Mtdt |
— ^ сФ1тІх 2 m |
[ sin at sin (at ~y)dt |
— сФуІу 2 |
cos |
y. |
|
|
0 |
|
Ü |
|
|
|
|
|
|
|
|
|
|
|
(67) |
В первом приближении можно считать, что индуктивное сопротивление |
диска |
||||||
мало по сравнению с его активным |
сопротивлением, т. е. ^ |
RB 0 п f |
= |
^ . В этом |
|||
случае вращающие моменты от взаимодействия потока Ф г |
и тока |
а также по |
|||||
тока Ф 2 |
и тока / 2 і 2 |
будут практически равны нулю . |
|
|
|
|
|
Рис. 39. Индукционный двухпоточный измерительный механизм: а — идея устройства; б — векторная диаграмма; в — диск со следами потоков и контурами токов
Определим |
значение |
вращающих |
моментов |
от взаимодействия потока |
Ф х |
|||||
п тока / 2 , 2 , потока Ф 2 |
и тока / ь 2 . Д л я этого воспользуемся формулой (67). Предпо |
|||||||||
ложил!, "что углы ах |
= а 3 |
= |
0, т. е. индуктивностью диска |
пренебрегаем: |
|
|||||
|
|
|
|
|
|
/ я |
|
\ |
|
|
•'Д^і = |
^Фі/ 2 . аСОЗ |
Y i ^ r ^ / g . a c o s |
f y |
+ |
ijj )== — e ^ / j j . g s i n i j ) ; |
(68) |
||||
M2 = |
ъФ21ъ |
|
y-i = с 2 Ф 2 h, |
|
/ i t |
|
\ |
|
|
|
a cos |
2 cos |
у |
- с |
2 Ф 2 / ! , g |
sin lj) . |
(69) |
||||
Из выражений (68) и (69) видно, что моменты имеют различные знаки и, ка залось бы, действие их на подвижную часть будет противоположно. Однако оба момента будут действовать на подвижную часть в одну сторону, что можно до казать, основываясь на физических процессах, происходящих в измерительном механизме. Действительно, взаимодействие потока и тока в диске, который имеет возможность перемещаться, сводится к втягиванию в магнитное поле полюсов или выталкиванию из него диска с контуром тока.
Различие знаков у моментов Мх и Мг указывает на то, что один контур тока втягивается в поле, а другой — выталкивается из соответствующего поля . На -
85
пример, |
если |
принять, что |
контур |
тока |
/ Ь 2 |
втягивается |
|
во взаимодействующее |
||||||||||||
с ИИЛІ поле |
Ф 2 |
(рис. 39, |
в), |
то контур |
тока / 2 , 2 будет |
выталкиваться |
из поля Ф х . |
|||||||||||||
Следовательно, оба момента |
Mt |
п Л/., совпадают по направлению и будут переме |
||||||||||||||||||
щать диск |
в |
одну |
сторону. Д л я |
определении |
направления |
результирующего |
||||||||||||||
момента можно воспользоваться правилом, по |
которому |
сила |
взаимодействия |
|||||||||||||||||
или момент направлены от опережающего |
по фазе |
потока |
к |
отстающему |
||||||||||||||||
(рис. 39, |
б). |
В данном случае опережающий |
по фазе поток Ф 1 |
расположен слева |
||||||||||||||||
от потока Фо, поэтому направление моментов Мг |
и М 2 будет слева направо, т. е. |
|||||||||||||||||||
подвижная, |
часть |
будет |
перемещаться |
в |
направлении, |
указанном |
стрелкой |
|||||||||||||
(рис. 39, |
в). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таким |
образом, моменты JVf, и |
Мг, |
несмотря на |
разные знаки в |
уравнениях |
|||||||||||||||
(68) и (69), будут совпадать по направлении). Поэтому для |
результирующего мо |
|||||||||||||||||||
мента М, |
действующего |
на |
подвижную |
часть, |
можно написать |
|
|
|
||||||||||||
|
|
|
M |
= |
Л/ 2 - | - ( - |
Мг) |
= (с2Ф.,Гх, |
z + |
c^J.,, |
2 ) |
smi|;. |
|
|
|
|
|||||
При |
однородном |
строении |
диска, |
а |
такя-;е |
при |
сіигусоидальном |
характере |
||||||||||||
изменения потоков можно допустить, что вихревые токи связаны с порождаю щими их потоками зависимостью
|
|
|
h, 2 = ^ / Ф і И / 2 , 2 = С 4 / Ф 2 , |
|
||
где |
/ — частота |
изменения |
потоков; |
с3 и ^ — коэффициенты |
пропорциональ |
|
ности. |
|
|
|
|
|
|
|
Тогда результирующий |
момент |
будет |
|
||
|
|
|
Л/ = ( л Л / Ф 2 Ф , + с Л / Ф 1 Ф 2 ) 8 І п і | ) = г / Ф 1 ф а 3 і п і | ) , |
(70) |
||
где |
с = |
с2 с3 + |
с^і. |
|
|
|
|
Выражение (70) для M является общим для всех многопоточных индукцион |
|||||
ных |
измерительных механизмов. Это выражение показывает |
следующее: |
||||
|
•1) для создания вращающего момента необходимо иметь не менее двух нере |
|||||
менных магнитных потоков ИЛИ двух |
составляющих одного потока, сдвинутых |
|||||
по фазе |
и смещенных в пространстве; |
|
||||
2)вращающий момент достигает своего максимального значения, если сдвпг по фазе между потоками равен 90°;
3)вращающий момент зависит от частоты тока.
Особое место среди электромеханических приборов занимают аналоговые сигнализирующие контактные приборы (AGK), позво ляющие существенно усовершенствовать контроль и управление раз личными объектами. В СССР создан унифицированный комплекс АСК и принят стандарт на эти приборы (ГОСТ 15182—70).
Основным типом приборов АСК является плоскопрофильный прибор (рис. 40). Он имеет литой корпус 1, закрытый крышкой 2. Внутри корпуса размещен измерительный механизм (магнитоэлект рический, электромагнитный или ферродинамический) с оптическим указателем. С задней стороны корпуса расположен патрон освети тельной лампы 3, закрываемой крышкой 4. Штепсельный разъем 5 служит для подключения измерительной цепи, цепи питания лампы и цепей сигнализации и регулирования (см. далее). Шкала 7 за крыта наличником, состоящим из стекла и рамки 8. Шкала снабжена прорезью, закрытой матовым экраном 9, на который проектируется световой указатель 10.
Конструктивное оформление плоскопрофильного прибора поз воляет эффективно использовать площадь панели щита или.пульта оператора. При приблизительно равной длине шкалы прибора АСК занимают на щитах в 5—10 раз меньшую площадь по сравнению
86
с приборами обычного исполнения (с круглыми или квадратными корпусами).
13 |
12 |
11 |
10 |
9 |
8 |
Рис. 40. |
Плоскопрофпльнын прибор |
||||
Сигнализирующие приборы АСК снабжены двумя цветными све
тофильтрами — шторками |
(слева — зеленый, справа — красный). |
||
Светофильтры |
расположены |
||
за шкалой таким образом, что |
|||
световой указатель |
при |
вы |
|
ходе измеряемой |
величины |
||
за устрановлонные |
пределы |
||
изменяет свой |
цвет. |
|
|
На крышку прибора выве дены корректор 13 и регуля торы установки светофильт ров 6 и 15. Для контроля по ложения светофильтров на шкале под матовым стеклом имеется прозрачная полоса 12, через которую видны све тофильтры 11 и 14. Для уста новки светофильтров прибо ры с помощью специального захвата можно выдвигать из щита (рис. 41).
Приборы АСК снабжены фоторезисторами, связанны ми со шторками. При дости жении световым указателем установленного значения фо торезистор засвечивается, его
Захват
Монтаж плоскопрофильных при боров на щите
сопротивление резко уменьшается, ток в цепи управления возра стает, что используется для переключения цепей регулирования посредством релейных устройств.
87
Объединение нескольких плоскопрофильных приборов в один корпус позволило создать многоканальные и многошкальные при боры АСК. Многоканальные приборы занимают в два раза меньшую площадь, чем равное по числу каналов количество узкопрофильных приборов. Многошкальные приборы посредством специального ме ханизма позволяют переключать световой указатель с одной шкалы на другую одновременно с переключением измеряемого параметра.
13. Шунты и добавочные сопротивления
Общие замечания. В практике электрических измерений встре
чается необходимость измерить токи, напряжения и другие |
величины |
||||||||||
в очень широком диапазоне их значений. Так, например, |
диапазон |
||||||||||
значений |
постоянных токов |
приблизительно |
равен 10 1 6 —105 А. |
||||||||
|
'f€h |
Для того чтобы использовать |
измеритель |
||||||||
|
ные |
механизмы |
для различных |
пределов |
|||||||
|
измерения |
токов, напряжений |
и |
других |
|||||||
|
|
|
величин широко применяются измеритель- |
||||||||
|
|
|
ные |
преобразователи |
тока |
и |
напряже |
||||
|
|
|
ния в виде шунтов и добавочных сопро- |
||||||||
Гис, |
42. Схема включения |
тивлений. |
|
|
|
|
|
|
|
||
измерительного механизма |
Шунты. |
На |
рис. 42 |
приведена |
схема |
||||||
|
с шунтом |
включения |
магнитоэлектрического |
меха |
|||||||
|
|
|
низма ИМ с шунтом гш. |
Если |
необходимо |
||||||
иметь ток /„ в измерительном механизме меньше в |
п |
раз изме |
|||||||||
ряемого |
тока / , то сопротивление шунта |
|
|
|
|
|
|
||||
|
|
|
|
п-і |
' |
|
|
|
|
|
|
где |
ги — сопротивление |
измерительного |
механизма; |
п = |
///,, — |
||||||
коэффициент шунтирования. |
|
|
|
|
|
|
|
|
|||
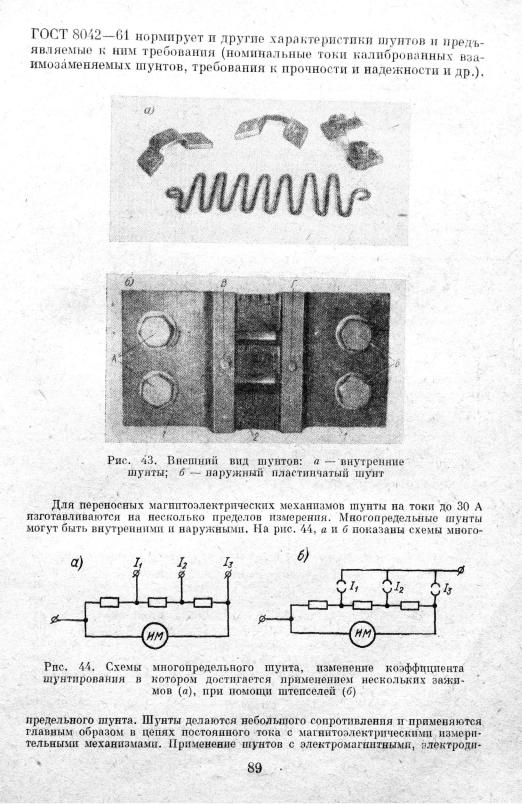
Шунты изготовляются из манганина. На небольшие токи (до 30 А) шунты обычно помещаются в корпусе прибора (внутренние шунты);
на большие |
токи (до |
7500 А) применяются наружные |
шунты. |
На |
|
рис. |
43, а |
показаны |
некоторые типы внутренних шунтов, а |
на |
|
рис. |
43, б — наружный шунт на ток 2000 А. Он имеет |
массивные |
|||
наконечники 1 из красной меди, между которыми впаяны манганино вые пластины 2. Наружные шунты на большие токи имеют зажимы А и В (рис. 43, б) для включения проводников с измеряемым током и так называемые потенциальные зажимы В и Г для включения изме рительного механизма. Между этими зажимами и заключено сопро тивление шунта. Наружные шунты обычно делаются калиброван ными, т. е. рассчитываются на определенные токи и падения напря жения. По ГОСТ калиброванные шунты должны иметь номинальное
падение напряжения |
60 и 70 мВ. |
В обоснованных |
случаях допускается с разрешения Комитета |
стандартов, мер и измерительных приборов при |
СМ СССР изготовлять |
|
шунты с номинальным падением |
напряжения |
100, 150 и 300 мВ. |
По точности шунты разделяются |
на классы 0,02; 0,05; 0,1; 0,2 и 0,5. |
|
88