

Фбгоувпо
«Московский государственный строительный университет»
кафедра «Механическое оборудование, детали машин и технология металлов»
Конспект лекции №3 по дисциплине
«Теория механизмов и машин»
для бакалавров по направлению 270800
Москва 2013-09-16
Продолжение темы
«Синтез плоских рычажных механизмов»
Условиями синтеза могут быть: 1) существование механизма или условие проворачиваемости звеньев; 2) получение заданного закона или характеристик движения; 3) обеспечение минимальных углов давления; 4) возможность конструктивного оформления механизма; и другие. Рассмотрим их.
1. Существование механизма или условие проворачиваемости звеньев.
Это условие означает, что в рычажном механизме должен быть один или два кривошипа, то есть звено, способное совершать полный оборот вокруг неподвижной точки.

Рис.3.1 Расчетная схема шарнирного четырехзвенника
Для вывода условия
существования кривошипа рассмотрим
шарнирный четырехзвенник в его двух
крайних положениях (рис.3.1). Известно,
что в крайних положениях рычажного
механизма оси кривошипа и шатуна лежат
на одной прямой. На схеме рис.3.1 показан
четырехзвенник ABCD
в его крайних положениях: AB1C1D
и AB2C2D.
Обозначим размеры звеньев, включая
стойку AD,
соответственно через a,
b,
c,
d.
Тогда по свойству треугольника, что
сумма двух его сторон больше третьей,
запишем уравнения: из ΔAC1D
 d<b+a+c
и из ΔAC2D
d<b+a+c
и из ΔAC2D
 d<b–a+c.
Эти неравенства позволяют получить
следующие:
d<b–a+c.
Эти неравенства позволяют получить
следующие:
|
|
а + d< с +b |
(3.1) |
|
|
d– а < с +b |
(3.2) |
Выполнение неравенства (3.1) обеспечивает выполнение неравенства (3.2) независимо от соотношения сторон cиb. А если неравенство (3.2) выполняется при максимальном значении левой части, то есть, когдаd– размер самого длинного звена, а а – размер самого короткого, то звено а будет кривошипом и сможет совершать полный оборот вокруг стойки. Этот вывод составляет суть правила Грасгофа
|
Кривошипом может быть самое короткое звено шарнирного четырехзвенника, если сумма длин самого короткого и самого длинного звеньев будет меньше суммы длин остальных звеньев.
|
2. Получение заданного закона или характеристик движения.
Синтез механизма с определенным законом движения выходного звена часто выполняют с той или иной степенью приближения. Иногда удается получить точное совпадение и тогда сам механизм может даже иметь соответствующее название, например, синусный или тангенсный, то есть,
перемещение выходного звена подчиняется закону синуса или тангенса. В простейших случаях требуется получить, например, только возвратно – поступательное или качательное движение звена с требуемым линейным или
угловым ходом.
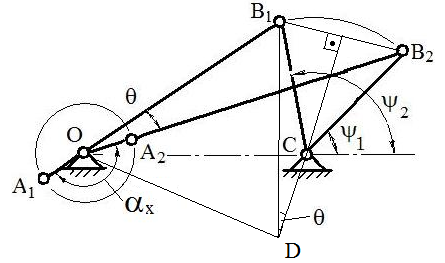
Рис.3.3 Расчетная схема механизма
На рис.3.3 показана
расчетная схема для случая проектирования
механизма по двум крайним положениям
выходного звена – коромысла – и
требуемому коэффициенту изменения
средней скорости. Этот коэффициент
 равен отношению средних угловых скоростей
коромысла в холостом
равен отношению средних угловых скоростей
коромысла в холостом и рабочем
и рабочем ходе и имеет числовое значение больше
единицы, что характеризует сокращение
времени холостого хода по сравнению с
рабочим. Для схемы рис.3.3 холостому ходу
соответствует нижняя часть дуги
ходе и имеет числовое значение больше
единицы, что характеризует сокращение
времени холостого хода по сравнению с
рабочим. Для схемы рис.3.3 холостому ходу
соответствует нижняя часть дуги на угле поворота кривошипа
на угле поворота кривошипа ,
а рабочему ходу, соответственно, - верхняя
часть этой дуги на угле поворота
кривошипа
,
а рабочему ходу, соответственно, - верхняя
часть этой дуги на угле поворота
кривошипа .
Тогда, при постоянной скорости вращения
кривошипа ОА и известной (заданной)
длине коромысла АС можно записать
.
Тогда, при постоянной скорости вращения
кривошипа ОА и известной (заданной)
длине коромысла АС можно записать
где
угол
 называют угловым ходом коромысла или
его размахом движения.
называют угловым ходом коромысла или
его размахом движения.
Угол
 определяется через заданный коэффициенту
изменения средней скорости
определяется через заданный коэффициенту
изменения средней скорости как
как

Теперь, если к
середине отрезка В1В2
провести перпендикуляр через точку С
и отложить угол
 В2В1D=
В2В1D= ,
то получим центр окружностиD,
проходящей через точки В1
и В2.
Из планиметрии известно, что угол,
вершина которого находится на окружности
и стягивает дугу, равен половине угловой
меры этой дуги. Поэтому, окружность с
радиусом В1D=ОD
будет геометрическим местом точек, в
которые можно поместить искомый центр
кривошипа. Для выбора конкретного
положения точки О требуется дополнительное
условие, например по расположению линии
центров ОС, или по ограничениям на длину
стойки ОС, или по допустимому углу
давления, к определению которого мы
переходим.
,
то получим центр окружностиD,
проходящей через точки В1
и В2.
Из планиметрии известно, что угол,
вершина которого находится на окружности
и стягивает дугу, равен половине угловой
меры этой дуги. Поэтому, окружность с
радиусом В1D=ОD
будет геометрическим местом точек, в
которые можно поместить искомый центр
кривошипа. Для выбора конкретного
положения точки О требуется дополнительное
условие, например по расположению линии
центров ОС, или по ограничениям на длину
стойки ОС, или по допустимому углу
давления, к определению которого мы
переходим.
3. Требование по обеспечению минимальных углов давления в рычажных механизмах связано с желанием получить минимальные потери на трение при передаче движения и избежать, так называемых, мертвых точек, когда движение невозможно или затруднительно.
|
Углом давления называют угол между векторами силы, приложенной к звену, и скорости точки приложения этой силы.
|
Иногда наряду с
углом давления различают угол передачи
движения
 Еще одно замечание: если обозначим через
Еще одно замечание: если обозначим через угол давления на звено 1 со стороны звена
2, а через
угол давления на звено 1 со стороны звена
2, а через угол давления на звено 2 со стороны звена
1, то
угол давления на звено 2 со стороны звена
1, то Угол давления играет важную роль во
всех передаточных механизмах: рычажных,
кулачковых, зубчатых и так далее.
Угол давления играет важную роль во
всех передаточных механизмах: рычажных,
кулачковых, зубчатых и так далее.

Рис.3.4 Углы давления
Например, для
шарнирного четырехзвенника (рис.3.4) в
кинематической паре В угол давления
 - это угол между реакциейR12
действия
звена 1 на звено 2 и скоростью V1
точки В; в кинематической паре С угол
давления
- это угол между реакциейR12
действия
звена 1 на звено 2 и скоростью V1
точки В; в кинематической паре С угол
давления
 - это угол между реакциейR23
действия
звена 2 на звено 3 и скоростью V3
точки С.
- это угол между реакциейR23
действия
звена 2 на звено 3 и скоростью V3
точки С.
Если угол давления равен 900 (или с учетом трения близок к нему), то передача движения может быть невозможной, и потребуются решения для исключения такой ситуации. Допустимый угол давления задают из опыта и исходя из трения в кинематической паре. Подробнее о реакциях и трении мы поговорим позже при рассмотрении силового анализа механизмов, а о скоростях – в кинематическом расчете.
4. Возможны и другие условия, например, по конструктивному оформлению механизма или получения требуемых габаритов. Известно, что обычно стремятся к минимальным габаритам, но тогда могут не выполняться другие условия. Так при выборе минимальных размеров кулачкового механизма по допустимому углу давления не удается встроить подшипник качения по условиям его работоспособности; при конструировании встроенного привода барабана конвейера с планетарным редуктором могут возникнуть затруднения с размещением подшипников сателлитов и их нагревом и так далее.
Рассмотрение условий проектирования не может быть исчерпывающим, тем более в данном курсе. Однако, мы коснемся еще одной проблемы: возможности возникновения внутренней напряженности или неопределенности из-за избыточных связей.