

7.3. Механизм первого класса
В нашем примере
это кривошип АВ
(звено 1),
соединенный со стойкой вращательной
кинематической пары А
(см. рис. 17). Будем рассматривать равновесие
кривошипа с приложенной к нему в точке
В
под прямым углом уравновешивающей силой
![]() (рис.22,а). К этой же точкеВ
приложена реакция
(рис.22,а). К этой же точкеВ
приложена реакция
![]()
![]() , которую мы уже нашли, решая структурную
группу звеньев 2-3.
, которую мы уже нашли, решая структурную
группу звеньев 2-3.
а б в
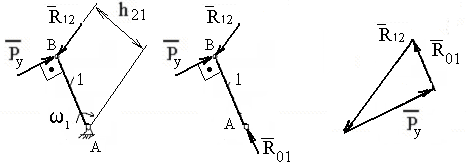
Рис. 22. Расчетная схема механизма 1-го класса (а);
ведущего звена 1 (б) и план сил звена 1 (в)
Уравновешивающую силу найдем из условия равновесия: ΣМА= 0
Py
AB
– R21
h21
= 0
![]() .
.
Теперь
осталось найти реакцию в кинематической
паре А,
для чего рассмотрим равновесие звена
1 (рис. 22, б). Векторная сумма сил, приложенных
к звену, должна быть равна нулю:
![]() .
Здесь неизвестна только реакция
.
Здесь неизвестна только реакция![]() ,
которую находим из плана сил (рис. 22, в).
Строим последовательно вектора
,
которую находим из плана сил (рис. 22, в).
Строим последовательно вектора![]() .
Вектор, соединяющий на рис. 16,в конец
вектора
.
Вектор, соединяющий на рис. 16,в конец
вектора![]() с началом вектора
с началом вектора![]() ,
и будет искомая реакция
,
и будет искомая реакция![]() .
Кстати, вектор
.
Кстати, вектор![]() должен быть параллелен звенуАВ,
если к этому звену между точками А
и В
не приложено никаких сил и моментов.
должен быть параллелен звенуАВ,
если к этому звену между точками А
и В
не приложено никаких сил и моментов.
По
масштабу сил из плана сил находим
величину реакции
![]() .
.
Таким образом, выполнен силовой расчет механизма, заключающийся в определении реакций во всех кинематических парах и уравновешивающей силы. По условию задания также требуется найти уравновешивающую силу с помощью рычага Жуковского.
8. Определение уравновешивающей силы с помощью рычага Жуковского
Решение этой задачи выполним для рабочего хода по методике стр. 10, а в холостом ходе будем поворачивать не план скоростей, а внешние силы.
8.1. Рабочий ход
Строим план скоростей* и поворачиваем его на 90º по часовой стрелке (можно повернуть в любую, но одну сторону) рис. 23.
На этом плане находим точки, к которым приложены внешние силы, и рисуем эти силы. В нашем случае это точка «f», к которой приложена сила полезного сопротивления Рпс, и точка «в», к которой прикладываем уравновешивающую силу Ру. Рассматривая эту схему как жесткий рычаг, приравниваем нулю сумму моментов всех сил относительно полюса «Р» и вычисляем уравновешивающую силу: ΣМр = 0,
Ру(Рв)
– Рпс(Рf)
= 0
![]() .
.
Заметим, что плечи (pb) и (pf) измеряем в мм по плану скоростей.
Р а б
методом Жуковского:
а – план скоростей механизма; б – рычаг Жуковского
8.2. Холостой ход
Строим план скоростей (рис. 24) для расчетного положения механизма (см. рис. 17). На этом плане находим те точки, к которым были приложены все силы, учитываемые при силовом анализе, т.е. точки: в, к2, s2, к3, s3, s4, f. К этим точкам прикладываем соответствующие силы, повернутые на 90° по часовой стрелке (повернуть можно в любую, но одну сторону).
И далее, из условия ΣМр = 0 находим Ру:. ∑Мр = 0;
Ру(рв)+Рu2(h2) –G2(hG2) + Pu3(h3)–G3(hG3) – G4(hG4)– (G5 –Pu5)(h5) =0;
Ру=–Рu2![]() +G2
+G2![]() –Pu3
–Pu3![]() +G3
+G3![]() +G4
+G4
![]() +(G5–Pu5)
+(G5–Pu5)
![]() .
.

Рис. 24. Определение уравновешивающей силы в холостом ходе
методом Жуковского
9. Сравнение уравновешивающих сил, полученных разными методами
Цель сравнения – получить сравнительную оценку выполнения расчета. Часто определение уравновешивающей силы методом Жуковского оказывается более точным. Сравнение можно выполнить в виде
 ,
,
где Руж, Ру – уравновешивающая сила, определенная соответственно методом Жуковского и силового анализа. Величина |∆ Ру| не должна превышать 5%…7%.
Это сравнение выполняют для тех двух положений механизма, для которых был выполнен силовой анализ.
Контрольные вопросы к защите
второго листа курсового проекта
1. Какова цель силового анализа механизма?
2. Каков порядок силового расчета и почему?
3. Из каких условий находят реакции в кинематических парах?
4. Какие силы могут быть учтены при составлении расчетной схемы?
5. Как действия силы и момента инерции можно заменить действием одной силы инерции?
6
Библиографический список
Теория механизмов и механика машин: Учебник для вузов / Под ред. К.В. Фролова. М.: Изд-во МГТУ, 2002.
О г л а в л е н и е
|
1. Цель силового анализа ………………………………………… 2. Классификация и характеристика сил ………………………... 3. Порядок силового расчета плоского рычажного механизма…. 4. Рычаг Жуковского ……………………………………………... 5. Задачи и исходные данные второго листа курсового проекта... 6. Пример выполнения силового расчета в рабочем ходе механизма ………………………………………………………. 6.1. Структурная группа звеньев 4-5 …………………………. 6.2. Структурная группа звеньев 2-3 …………………………. 6.3. Механизм первого класса ………………………………… 6.3.1. Уравновешивающая сила ………………………….. 6.3.2. Уравновешивающий момент ………………………. 7. Пример выполнения силового расчета рычажного механизма в холостом ходе …...……………………………………………. 7.1. Структурная группа звеньев 4-5 …………………………. 7.2. Структурная группа звеньев 2-3 …………………………. 7.3. Механизм первого класса ………………………………… 8. Определение уравновешивающей силы с помощью рычага Жуковского ……………………………………………………... 8.1. Рабочий ход …………………………………..…………… 8.2. Холостой ход …………………………………..………….. 9. Сравнение уравновешивающих сил, полученных разными методами ………………………………………………………... Контрольные вопросы к защите второго листа курсового проекта …………………………………………………………….. Библиографический список ………………………………………
|
1 1 9 10 11
12 13 15 17 17 18
19 21 24 27
28 28 29
30
31 31 |
СИЛОВОЙ АНАЛИЗ РЫЧАЖНЫХ МЕХАНИЗМОВ
Методические указания к выполнению
курсового проекта по теории механизмов и машин
для студентов заочной формы обучения
специальностей 2913, 1709, 1716
Редактор О.А. Гладкова
Компьютерная правка и верстка О.В. Суховой
Лицензия ЛР № 020675 от 09.12.1997 г.
Подписано в печать 28.04.2008 г. Формат 60´84 1/16 Печать офсетная
И-68 Объем 2,25 п.л. Т. 300 Заказ
Московский государственный строительный университет.
Т
*Метрической называют схему механизма, выполненную в масштабе при известных размерах всех звеньев и взаимном расположении всех кинематических пар.
*Вращение пальца 1 с радиусомr1во втулке 2 с радиусомr2возможно приr2 >r1. Эти радиусы могут отличаться от номинального (расчетного) радиуса пары только в пределах допусков, поэтому в данном случае принимаемr1 =r2 =r, обеспечивающих соединение с зазором.
*При реальном силовом расчете в качестве
расчетных обычно выбирают несколько
положений с целью, например, определения
максимальных нагрузок в каждой из
кинематических пар от действия внешних
сил, включая силы инерции. Если задан
момент полезного сопротивленияМпс,
приложенный к выходному звену –
коромыслу, то его можно заменить парой
сил![]() ,
гдеl– длина выходного
звена. Следовательно, эти силы пары
приложены перпендикулярно звену в
кинематических парах, ограничивающих
длину выходного звена.
,
гдеl– длина выходного
звена. Следовательно, эти силы пары
приложены перпендикулярно звену в
кинематических парах, ограничивающих
длину выходного звена.
*Значение сил рекомендуем округлять до трех значащих цифр. Далее числовое значение сил приводить не будем, а выполним расчет в общем виде.
*На расчетной схеме, в отличие от плана сил, силы изображают в одном масштабе
**Если бы рассматривали равновесие 4-го
звена, то нашли бы реакцию
![]()
![]() .
.
*Они, в зависимости от положения звеньев
механизма, могут быть направлены и в
одну сторону. Тогда общий вектор будет(![]() ).
).
*План скоростей можно перенести с 1-го листа курсового проекта.