

(ТММ) Лекция 5 ТММ 02.10.13
.docxФБГОУВПО
«Московский государственный строительный университет»
кафедра «Механическое оборудование, детали машин и технология металлов»
Конспект лекции №5 по дисциплине
«Теория механизмов и машин»
для бакалавров по направлению 270800
Москва 2013-10-02
12.1Силы инерции.
Под силой инерции
понимается вектор
 ,
равный произведению массы на ускорение
центра масс и направленный против
ускорения центра масс:
,
равный произведению массы на ускорение
центра масс и направленный против
ускорения центра масс:

где
m
- масса тела,
 -
вектор ускорения центра масс.
-
вектор ускорения центра масс.
При сложном движении
тела (рис. 12.1), обладающего распределенной
массой, в общем случае кроме силы инерции
 ,
приложенной к центру масс, возникает
момент от сил инерции или инерционный
момент
,
приложенной к центру масс, возникает
момент от сил инерции или инерционный
момент
 ,
приложенный к звену. Он равен произведению
момента инерции звена Is
относительно
оси, проходящей
через центр
масс и перпендикулярной плоскости
движения, на угловое ускорение этого
звена и направлен в сторону противоположную
угловому ускорению:
,
приложенный к звену. Он равен произведению
момента инерции звена Is
относительно
оси, проходящей
через центр
масс и перпендикулярной плоскости
движения, на угловое ускорение этого
звена и направлен в сторону противоположную
угловому ускорению:
 .
.
Действие силы
инерции
 и инерционного момента
и инерционного момента
 можно
заменить действием одной силы инерции,
смещенной параллельно самой себе на
плечо h=
=Ми/Ри
так, чтобы момент результирующей силы
инерции относительно центра масс был
направлен против углового ускорения
звена (рис. 12.1). Точка К,
к которой приложена результирующая
сила инерции, называется центром качания
звена.
можно
заменить действием одной силы инерции,
смещенной параллельно самой себе на
плечо h=
=Ми/Ри
так, чтобы момент результирующей силы
инерции относительно центра масс был
направлен против углового ускорения
звена (рис. 12.1). Точка К,
к которой приложена результирующая
сила инерции, называется центром качания
звена.
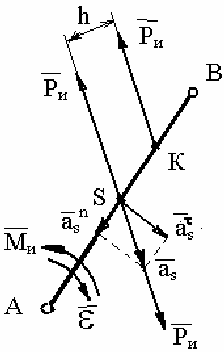
Рис. 12.1. Действие сил инерции при плоскопарал-
лельном движении звена
К рис. 12.1 можно сделать следующие пояснения.
1. При силовом
расчете к звену прикладывают либо в
центре масс S
силу инерции
 и момент инерции
и момент инерции
 ,
либо к центру качания звена в точке К
только силу инерции
,
либо к центру качания звена в точке К
только силу инерции
 .
.
2. Полное ускорение
центра масс звена при плоскопараллельном
движении
 складывается из двух составляющих:
нормальной
складывается из двух составляющих:
нормальной
 характеризующей изменение скорости по
направлению и направленной вдоль звена
к центру вращения, и тангенциальной
характеризующей изменение скорости по
направлению и направленной вдоль звена
к центру вращения, и тангенциальной
 характеризующей изменение скорости по
величине и направленной по касательной
к траектории движения центра масс.
Величина и направление углового ускорения
звена определяется тангенциальной
составляющей
характеризующей изменение скорости по
величине и направленной по касательной
к траектории движения центра масс.
Величина и направление углового ускорения
звена определяется тангенциальной
составляющей

-
Реакции в кинематических парах.
Статическая определимость структурных групп
Это силы взаимодействия звеньев. Если в кинематической паре соединены звенья i и j и звено i действует на звено j, то возникает реакция:

Обычно плоский механизм состоит из кинематических одноподвижных поступательных и вращательных пар и высшей двухподвижной пары.
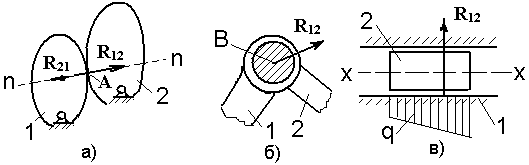
В высшей паре (рис.
12.2,а) реакция
 или
или
 возникает в точке соприкосновения тел
А
и направлена по общей нормали n-n
к контактирующим поверхностям. То есть
для высшей кинематической пары известно
направление реакции и точка её приложения
и неизвестен всего один параметр –
величина реакции.
возникает в точке соприкосновения тел
А
и направлена по общей нормали n-n
к контактирующим поверхностям. То есть
для высшей кинематической пары известно
направление реакции и точка её приложения
и неизвестен всего один параметр –
величина реакции.
Во вращательной паре (рис. 12.2,б) реакция R12 проходит через центр шарнира В, но её величина и направление неизвестны, т. е. неизвестны два параметра.
В поступательной
паре (рис. 12.2,в) реакция
 перпендикулярна направляющей х-х,
а ее величина
и точка приложения неизвестны,
т. е. как и в предыдущем случае неизвестны
два параметра.
перпендикулярна направляющей х-х,
а ее величина
и точка приложения неизвестны,
т. е. как и в предыдущем случае неизвестны
два параметра.
а
б
в
Рис. 12.2 Реакция в кинематических парах:
а – высшей; б – вращательной; в – поступательной
Таким образом, каждая высшая пара четвертого класса для определения реакции имеет одну неизвестную, а каждая низшая пара пятого класса – две неизвестные. Поэтому, если кинематическая цепь имеет число кинематических пар пятого и четвертого классов соответственно Р5 и Р4, то число неизвестных будет 2Р5+Р4. В то же время для этой цепи, состоящей из n звеньев, можно составить 3n уравнений статического равновесия. Статическая определимость кинематической цепи возникает при равенстве числа неизвестных числу уравнений статики:
2Р5 + Р4 = 3n или 3n – 2P5 – P4 = 0,
а это является уравнением структурной группы. Поэтому, структурные группы являются статически определимыми, что и определяет порядок силового анализа.
Порядок силового расчета
плоского рычажного механизма
1. Разложить схему механизма на структурные группы и начать силовой расчет с последней, считая от ведущего звена. Потом переходят к следующей группе и так далее в соответствии с формулой строения механизма, завершая расчет силовым анализом ведущего звена.
2. Рассмотреть равновесие структурной группы и входящих в нее звеньев с приложенными к ним внешними силами, причем влияние отброшенных связей заменяется реакциями.
Для вращательной
кинематической пары направление реакции
неизвестно. Поэтому её заменяют двумя
составляющими: вдоль звена – нормальной
 и перпендикулярно звену – тангенциальной
и перпендикулярно звену – тангенциальной
 .
Из условия, что сумма моментов всех сил,
приложенных к звену, относительно
внутренней кинематической пары равна
нулю, находится тангенциальная
составляющая во внешних парах. Затем
строится план сил для структурной
группы, из которого находятся нормальные
составляющие реакций этих внешних
кинематических пар. Для определения
реакции во внутренней кинематической
паре структурной группы необходимо
рассмотреть равновесие любого из звеньев
группы: если рассматривается равновесие
звена i,
то находят реакцию
.
Из условия, что сумма моментов всех сил,
приложенных к звену, относительно
внутренней кинематической пары равна
нулю, находится тангенциальная
составляющая во внешних парах. Затем
строится план сил для структурной
группы, из которого находятся нормальные
составляющие реакций этих внешних
кинематических пар. Для определения
реакции во внутренней кинематической
паре структурной группы необходимо
рассмотреть равновесие любого из звеньев
группы: если рассматривается равновесие
звена i,
то находят реакцию
 ,
если звена j
- то
,
если звена j
- то .
Так как
.
Так как
 =
-
=
- ,
то обычно рассматривают равновесие
того звена, к которому приложено меньше
сил.
,
то обычно рассматривают равновесие
того звена, к которому приложено меньше
сил.
В случае поступательной кинематической пары шарнир обычно размещают посередине длины ползуна. Тогда к ползуну со стороны направляющей будет приложена реакция перпендикулярно этой направляющей и проходящей через центр шарнира. Далее, используя условия равновесия структурной группы и звеньев, находят неизвестные реакции.
3. Завершить расчет следует силовым анализом ведущего звена с приложенной к нему уравновешивающей силой Pу или уравновешивающим моментом Му. Здесь подразумевается, что ведущее звено вращательное.
Механизм первого класса имеет одну степень свободы и для равновесия ведущего звена требуется приложить к нему уравновешивающую силу или момент. Эта сила или момент уравновешивают действие всех сил и моментов, приложенных к звеньям механизма, и представляют собой движущую силу, если кривошип приводится в движение с помощью зубчатой передачи, или движущий момент – если с помощью приводной муфты. Уравновешивающую силу принято прикладывать в общем случае перпендикулярно кривошипу и к его концу. Таким образом, линия действия этой силой известна, и ее величина найдется из равенства нулю суммы моментов сил относительно центра вращения кривошипа. Из этого же условия равенства нулю суммы моментов всех сил относительно опоры кривошипа находится и уравновешивающий момент. Реакцию в этом центре, т. е. в опоре, можно найти из плана сил для ведущего звена. Уравновешивающая сила и уравновешивающий момент связаны между собой простой зависимостью:
Му = Руl,
где l – длина кривошипа.
12.3 Рычаг Жуковского
При проектировании механизма возникает потребность в определении уравновешивающей силы без определения реакций в кинематических парах, например, для расчета мощности двигателя. Эту задачу можно решить с помощью рычага Жуковского: если под действием внешних сил, включая силы инерции, механизм находится в равновесии, то повернутый план скоростей этого механизма, рассматриваемый как жесткий рычаг с опорой в полюсе, под действием тех же сил, перенесенных в одноименные точки, также будет находиться в равновесии.
По этому определению можно действовать в следующем порядке: 1) построить план скоростей механизма; 2) повернуть этот план на 900 в любую сторону; 3) найти на плане скоростей те точки, к которым на схеме механизма приложены внешние силы, включая уравновешивающую (если приложен момент, то можно заменить его парой сил), и в эти точки приложить соответствующие силы; 4) рассматривая план скоростей как жесткий рычаг, взять сумму моментов всех сил относительно полюса плана скоростей и приравнять его нулю (плечи сил измеряют по плану скоростей, например, в миллиметрах); 5) из этого условия (∑Мр=0) находится уравновешивающая сила.
На практике иногда поступают по-другому: строят план скоростей, а затем прикладывают в соответствующие точки все внешние силы, повернутые в одну (любую) сторону на 900. Из условия, что ∑Мр=0, находят уравновешивающую силу.