

Глава 14.
НАВИГАЦИОННЫЕ ГИДРОАКУСТИЧЕСКИЕ СИСТЕМЫ БЛИЖНЕГО ДЕЙСТВИЯ
Определение точных координат корабля при плавании в любом районе Мирового океана всегда имело для мореплавателей первостепенное значение. В последние годы в связи с освоением ресурсов океана и в интересах военно-морского флота требования к точности и надежности определения координат быстро возрастают, что привело к созданию и широкому внедрению на иностранных флотах навигационных гидроакустических систем (НГС) с донными гидроакустическими маяками. НГС, основанные на использовании устанавливаемых на дне моря донных гидроакустических маяков, обеспечивают определение места надводных кораблей, подводных лодок и глубоководных аппаратов с весьма высокой точностью в любых районах Мирового океана, оборудованных такими маячками, при любых гидрометеорологических условиях и на любых горизонтах плавания подводных лодок и глубоководных аппаратов.
Донные гидроакустические маяки таких систем могут устанавливаться на глубинах до 6000 м, т. е. практически в любых районах Мирового океана.
Место корабля по НГС определяется относительно донных маяков. Если известны их географические координаты, то можно определить место корабля и в географической системе координат. Точность определения географических координат маяков может быть существенно выше точности единичного определения места корабля с использованием космической навигационной системы или радионавигационной системы, так как при определении координат маяков есть возможность осреднения результатов многократных определений места корабля с использованием указанных систем при одновременном определении положения корабля относительно донных маяков. Системы с донными гидроакустическими маяками являются единственным средством, обеспечивающим с необходимой точностью определение места корабля при поисковых работах в океане, подъеме со дна затонувших объектов, буровых работах и решении ряда других задач.
Дальность действия НГС с донными маяками, как правило, не превышает 20—25 км.
В принципе, с использованием донных гидроакустических маяков в океане может быть создана геодезическая сеть, аналогичная сухопутной геодезической сети. Создание такой сети способствовало бы повышению точности навигационных систем других типов, так как позволило бы уточнить форму геоида, а также производить калибровку длинноволновых радионавигационных систем.
§ 14.1. ФИЗИЧЕСКИЕ ОСНОВЫ НАВИГАЦИОННЫХ ГИДРОАКУСТИЧЕСКИХ СИСТЕМ БЛИЖНЕГО ДЕЙСТВИЯ С ДОННЫМИ МАЯКАМИ
Функционирование НГС с гидроакустическими маяками основано на принципе излучения акустических колебаний в морскую воду, распространения их в этой среде и определения параметров принимаемого акустического сигнала (направления и времени прихода). Излучение сигналов осуществляется с помощью пьезоэлектрических преобразователей, в которых под действием приложенного электрического напряжения возникают механические колебания. При приеме сигналов происходит обратное явление).
Морская вода, как среда распространения, характеризуется затуханием звуковой энергии, величина которого определяется в децибелах на километр (дБ/км), скоростью распространения звуковой энергии и пространственными изменениями этих параметров.
Затухание звуковой энергии в первом приближении не зависит от направления распространения и увеличивается с ростом частоты акустического сигнала.
Скорость звука в воде, зависящая от температуры и солености воды, а также от гидростатического давления, значительно изменяется в вертикальном направлении; в горизонтальном направлении, в пределах сравнительно небольшой дальности действия НГС, скорость звука практически не изменяется.
В связи с тем, что скорость звука в морской среде является функцией глубины, при распространении звуковых сигналов в море возникает явление рефракции, т. е. искривление звуковых лучей, проходящих через слои с различными скоростями звука, которое существенно влияет на дальность действия систем с гидроакустическими маяками. Из закона преломления лучей в среде с переменной скоростью распространения следует, что акустический луч отклоняется от прямой линии в сторону слоя с меньшей скоростью звука. В зависимости от сезона, времени суток и географического положения района ско-
рость звука изменяется с глубиной по различным законам, которые могут быть обобщены в несколько типовых профилей распределения скорости звука по глубине для различных районов Мирового океана.
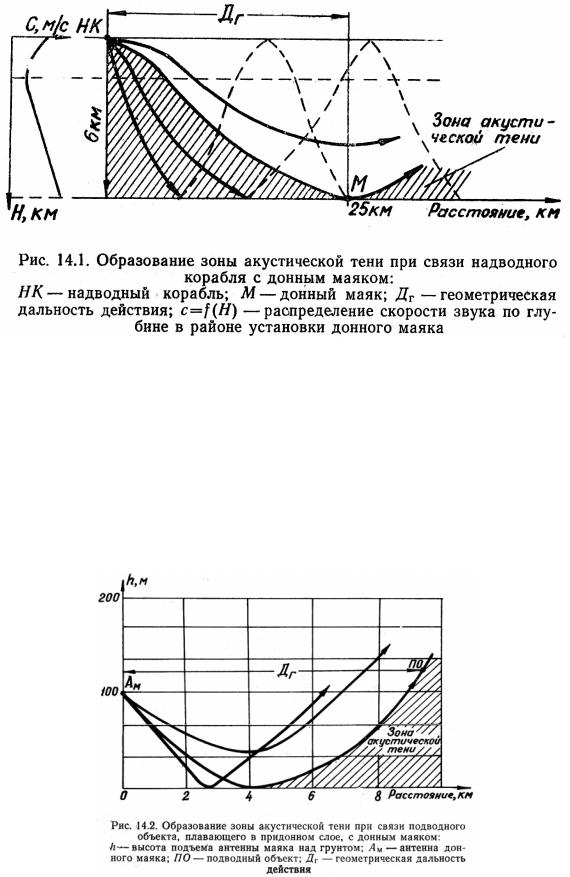
Данные о вертикальном распределении скорости звука позволяют по известным в гидроакустике формулам рассчитать геометрическую дальность действия НГС с донными маяками. Под геометрической дальностью действия Дт подразумевается горизонтальное расстояние от донного маяка до границы зоны акустической тени (рис. 14.1 и 14.2).
Вглубоководных районах Мирового океана с глубинами более 1000 м, как правило, скорость звука начиная с глубины 500—1000 м возрастает. В связи с этим на некотором расстоянии от гидроакустического излучателя, расположенного на дне, возникает зона акустической тени, в пределах которой увеличение акустической мощности сигнала практически не приводит к соответствующему увеличению дальности действия системы, так как в зону акустической тени могут попадать только лучи, отраженные от поверхности и дна моря (или только от одной из этих границ), что приводит к существенному уменьшению акустической энергии в зоне тени.
Вглубоководных районах океана размер первой зоны акустической освещенности в приповерхностных слоях, в которой принимаются лучи прямого прохождения от донного маяка, не превышает 20— 25 км (см. рис. 14.1).
Впридонных слоях глубоководных районов океана размер первой зоны акустической освещенности уменьшается до нескольких километров, что соответственно уменьшает дальность действия НГС для плавающих в придонных слоях объектов (рис. 14.2).
В мелководных районах распространение звукового сигнала сопровождается многочисленными отражениями от дна и поверхности моря, вносящими дополнительные потери энергии сигнала, в результате чего дальность действия таких систем также уменьшается и не превышает 10—15 км.
Поскольку главным требованием, которое предъявляется к НГС, является максимально возможная точность определения навигационного параметра (расстояние до маяка, направление на него), что обеспечивается только в первой зоне акустической освещенности, энергетическую дальность действия таких систем, по которой рассчитываются технические параметры аппаратуры, принимают не более максимальной геометрической дальности действия, т. е. не более 25 км.
Изменение скорости звука с глубиной приводит также к тому, что при определении в НГС расстояния между донным маяком и кораблем путем измерения времени распространения сигнала от маяка до корабля возникают затруднения при выборе величины скорости звука для данной траектории луча, так как скорость звука вдоль луча также является переменной величиной. На практике в большинстве случаев за среднюю скорость принимается среднее арифметическое или средневзвешенное значение скорости звука по глубине.
При выполнении особо точных измерений расстояния траектория звукового луча рассчитывается по известному для данного района профилю распределения скорости звука по глубине на ЭВМ. При этом вычисляется время пробега сигнала по лучу и соответствующее этому времени наклонное расстояние между донным маяком и кораблем.
Направление на источник звукового сигнала определяется с помощью штатных корабельных гидроакустических пеленгаторов или специальных моноимпульсных гидроакустических пеленгаторов.
§ 14.2. КЛАССИФИКАЦИЯ НАВИГАЦИОННЫХ ГИДРОАКУСТИЧЕСКИХ СИСТЕМ С ДОННЫМИ МАЯКАМИ
Навигационные гидроакустические системы с донными маяками могут быть разделены на следующие классы:
1. Дальномерно-пеленгационные системы, с помощью которых на корабле определяются расстояние до гидроакустического маяка и направление на него. Место корабля в таких системах определяется как точка пересечения поверхности сферы с центром в точке установки маяка и с радиусом, равным наклонному расстоянию от маяка до корабля, с горизонтальной плоскостью, в которой находится корабль, и вертикальной плоскостью, соответствующей пеленгу на маяк.
Дальномерно-пеленгационные системы используются на практике достаточно широко, так как являются единственным классом систем, которые обеспечивают однозначное определение места корабля по одному гидроакустическому маяку.
Все остальные классы систем требуют использования двух или более маяков, относительное положение которых должно быть точно известно.
Как дальномерно-пеленгационные системы могут рассматриваться и так называемые системы с «малой базой», когда на корабле размещается не менее трех приемников, не лежащих на одной прямой. Так как в этих системах направление на маяк определяется посредством измерения разности времен прихода сигнала (или разности фаз) маяка к гидроакустическим приемникам, пространственно разнесенным по днищу корабля, такие системы являются по существу гиперболическими. Однако, если расстояния между приемниками существенно меньше расстояния до маяка, что чаще всего встречается в практике, гиперболы могут рассматриваться как конусы, и направление на маяк в этом случае определяется как линия пересечения двух конусов.
2.Дальномерные системы, в которых на корабле определяются наклонные или горизонтальные расстояния до установленных на грунте двух или более гидроакустических маяков. При использовании дальномерных систем место корабля определяется как точка пересечения двух или более сфер с центрами в точках установки маяков и с радиусами, равными наклонным расстояниям от маяков до корабля
сгоризонтальной плоскостью, в которой находится корабль, или как точка пересечения двух или более окружностей, проведенных из точек установки маяков, с радиусами, равными горизонтальным расстояниям от маяков до корабля.
При использовании трех или более маяков задача определения места корабля решается однозначно. Для устранения неоднозначности определения места при использовании двух маяков необходимо априорно знать положение корабля относительно линии, соединяющей эти два маяка, т. е. знать, с какой стороны от этой линии находится корабль.
3.Разностно-дальномерные системы, в которых определяются разности расстояний от трех или

более гидроакустических маяков до корабля, или от корабля до маяков. В этом случае источниками сигналов могут быть как корабль, так и синхронизированные донные маяки с известными координатами их места постановки. В разностно-дальномерных системах место корабля определяется как точка пересечения гиперболоидов вращения, в фокусах которых расположены гидроакустические маяки. Донные маяки разностно-дальномерных систем работают в режиме синхронного излучения импульсных сигналов.
4. Пеленгационные системы, в которых определяются направления на два маяка. Место корабля в таких системах определяется как точка пересечения двух вертикальных плоскостей, соответствующих пеленгам на маяки, с горизонтальной плоскостью, в которой находится корабль. Донные маяки таких систем излучают сигналы по заданной программе. Пеленгуются сигналы на корабле, как правило, штатными гидроакустическими пеленгаторами. Пеленгационные системы обладают сравнительно невысокой точностью и могут использоваться в тех случаях, когда уровень помех в точках расположения маяков велик, а синхронизация работы маяков с достаточной точностью невозможна.
Рассмотрим подробнее наиболее распространенные дальномерно-пеленгационные и дальномерные НГС.
§ 14.3 ДАЛЬНОМЕРНО-ПЕЛЕНГАЦИОННЫЕ НАВИГАЦИОННЫЕ ГИДРОАКУСТИЧЕСКИЕ СИСТЕМЫ
В дальномерно-пеленгационных НГС, использующих для определения направления на маяк штатные корабельные пеленгаторы, положение корабля определяется относительно одного, установленного на дне гидроакустического маяка-ответчика. Запросный сигнал, излученный с корабля в нижнюю полусферу, принимается донным маяком, после чего маяк излучает в верхнюю полусферу ответный сигнал. Интервал времени ∆t между моментом излучения сигнала-запроса маяка и моментом приема сигналаответа (деленный пополам) соответствует наклонному расстоянию от корабля до маяка г, т. е.
r = |
c∆t |
|
(14.1) |
2 |
|
|
|
где с — средняя скорость звука на трассе распространения сигнала, м/с. |
|
||
Если для определения направления на маяк применяется штатный корабельный пеленгатор с обзором пространства узкой в горизонтальной плоскости характеристикой направленности, то ответный сигнал маяка состоит из двух импульсов: первого импульса сравнительно малой длительности и большой мощности, предназначенного для определения расстояния до маяка при ненаправленном приеме, и второго импульса сравнительно малой мощности и большой длительности, предназначенного для определения, направления на маяк. Длительность второго импульса определяется временем кругового обзора пространства при использовании штатного корабельного пеленгатора и временем, необходимым для надежного пеленгования маяка в режиме автоматического сопровождения цели.
Горизонтальное расстояние от корабля до маяка Dr определяется при известной разности в заглуб-
лении маяка и акустической антенны корабля от поверхности моря h по формуле |
(14.2) |
||||
DГ = |
r |
2 |
− h |
2 |
|
|
|
|
|||
а значение пеленга на маяк определяется по штатному пеленгатору.
Место корабля относительно донного маяка в такой системе определяется по горизонтальному расстоянию до маяка и пеленгу на него. Для повышения точности определения места корабля необходимо учитывать разновременность измерения дальности до маяка и пеленга на него, т. е. приводить их к одному моменту.
Погрешность определения места корабля при использовании штатного корабельного пеленгатора определяется в основном погрешностью измерения пеленга и составляет около 2% от расстояния до маяка при горизонтальных расстояниях, превышающих глубину под килем. При меньших расстояниях до маяка погрешность измерения пеленга увеличивается, так как штатные пеленгаторы имеют ограничения по углу наклона характеристики направленности в вертикальной плоскости и прием сигналов маяка в этом случае осуществляется не по максимуму характеристики направленности.
Для повышения точности определения направления на маяк в дальномерно-пеленгационных системах вместо штатных пеленгаторов используются специальные гидроакустические моноимпульсные пеленгаторы.
Акустическая антенна моноимпульсного пеленгатора корабельной аппаратуры такой системы состоит из размещаемых под днищем корабля трех или четырех ненаправленных в горизонтальной плос-
кости гидрофонов, точки установки которых не должны лежать на одной прямой. С помощью такого пеленгатора могут быть определены угол места маяка и курсовой угол на него.
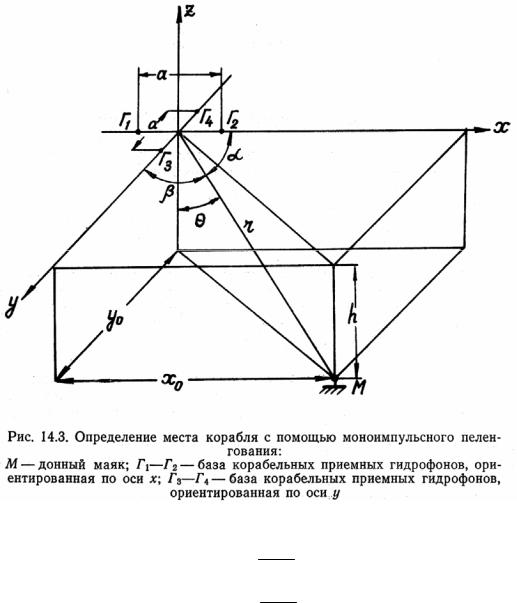
В НГС со специальным моноимпульсным пеленгатором измеряются углы прихода сигнала к линиям, соединяющим гидрофоны (линиям баз). Для обеспечения равной точности по горизонту базы а гидрофонов (расстояния между соответствующими парами гидрофонов) выбирают равными друг другу и взаимно перпендикулярными (рис. 14.3). В общем случае плоская волна приходит к линии одной базы под углом а и к линии другой базы под углом р. Разность времен прихода сигнала к гидрофонам баз ∆t1
и ∆t2 |
определяется как |
∆t1 |
= |
|
a |
|
cosα; |
|
|
|
|
c0 |
|
|
|||||
|
|
|
|
|
|
|
|
||
|
|
∆t2 |
= |
|
a |
cos β |
|
||
|
|
|
|
|
|||||
|
|
|
|
|
c0 |
|
|
|
|
где со — скорость звука в слое воды у днища корабля, м/с; |
|
||||||||
а — длина базы, м. |
|
|
|
|
|
|
|
|
|
|
Отсюда |
|
|
|
|
|
|
c0∆t1 |
(14.3) |
|
|
a = arccos |
|||||||
|
|
α |
|||||||
|
|
|
|
|
|
|
|
|
|
β = arccos |
c0 |
∆t2 |
(14.4) |
|
α |
||||
|
||||
|
|
|||
Если измеряется не разность времени прихода сигналов к гидрофонам базы, а разность фаз ∆φ1 и ∆φ2 сигнала частоты f0 в Гц, то можно записать
∆ϕ1 = 2πcf00 a cos α; ∆ϕ2 = 2πcf00a cos β
Откуда |
|
|
||
α = arccos |
c0 |
∆ϕ1 |
(14.5) |
|
2πf0a |
||||
|
|
|||
β = arccos |
c0 |
∆ϕ2 |
(14.6) |
|
2πf0a |
||||
|
||||
|
|
|||
Если две приемные базы из четырех гидрофонов расположены в плоскости, параллельной плоскости палубы, имеют общий центр и ортогональны, линия одной базы х направлена вдоль диаметральной плоскости корабля, а линия второй базы у направлена по траверзу вправо (см. рис. 14.3), то, исходя из геометрических соображений, можно получить выражения для координат маяка в корабельной системе координат, образованной двумя парами гидрофонов:
x0 |
= r cosα = |
h cosα |
= h cosα |
|
1 |
−cos2 α −cos2 β |
cos Θ |
y0 = r cos β = |
h cos β |
= h cos β |
|
|
|
1−cos2 α −cos2 β |
cos Θ |
где г — наклонное расстояние от корабля до маяка, м;
h — разность в заглублении маяка и приемных гидрофонов от поверхности моря, м; Θ — угол места маяка.
Курсовой угол на маяк определяется выражением
(14.7)
(14.8)
КУ = arctg |
y0 |
(14.9) |
x0
Из формул (14.7) и (14.8) следует, что для определения координат .х0, yо, а также курсового угла
КУ необходимо, кроме информации о значениях углов α и β, иметь также информацию либо о наклонном расстоянии от корабля до маяка г, либо о разности в заглублении маяка и приемных гидрофонов корабля от поверхности моря h.
Корабль практически никогда не находится на ровном киле, в связи с чем необходимо вводить поправки в определенные координаты маяка х0 и yо. Имея в виду, что дифферент не сказывается на значении у0, крен не сказывается на значении xо, так как ось х направлена вдоль диаметральной плоскости корабля, а ось у— по траверзу, исправленные поправками на крен и дифферент значения координат
маяка можно записать следующим образом: |
x |
|
|
|
|
|||
x' |
|
|
|
|
|
|||
|
= htg arctg |
0 |
+γ |
|
|
|||
|
|
|
|
|
||||
0 |
|
|
h |
|
|
|
(14.10) |
|
|
|
|
|
|||||
|
' |
|
|
y |
0 |
|
|
|
y |
= htg arctg |
|
+η |
|
|
|||
0 |
h |
|
||||||
|
|
|
|
|
(14.11) |
|||
|
|
|
|
|||||
где γ — угол дифферента на момент определения координат xо и у0; η—угол крена на тот же момент.
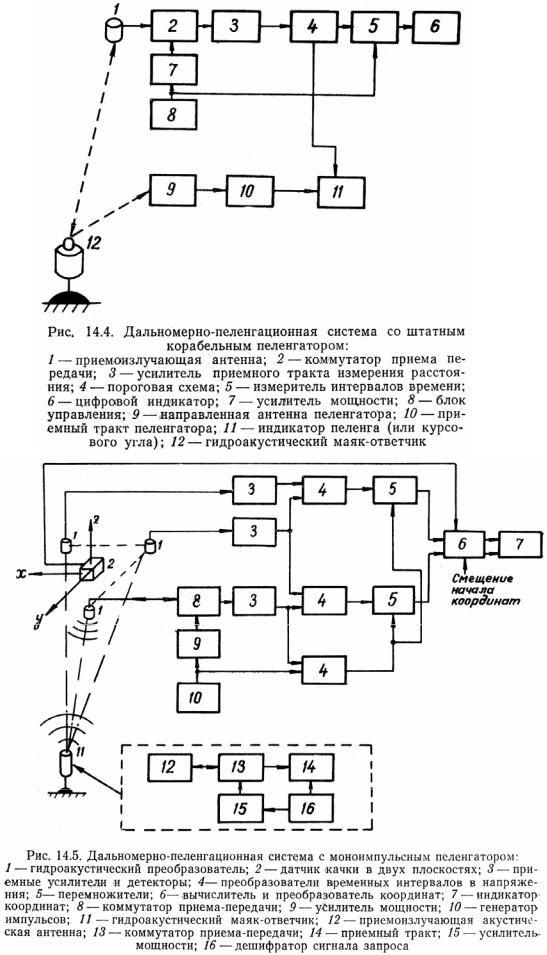
Значения γ и η положительны при опускании носа корабля и правого борта, соответственно. Структурные схемы дальномерно-пеленгационных систем соответствуют принципу их построения
(рис. 14.4 и рис. 14.5). В случае использования штатного гидроакустического пеленгатора корабельная аппаратура НГС (рис. 14.4) состоит из блока управления, вырабатывающего сигналы запроса маякаответчика и тактовые импульсы, частота следования которых устанавливается пропорционально значению скорости звука, деленному пополам, тракта приема ответного импульсного сигнала маяка-ответ- чика, предназначенного для измерения расстояния и измерителя временных интервалов, представляющего собой счетчик тактовых импульсов.
Наклонное расстояние от корабля до маяка-ответчика определяется автоматически как количество тактовых импульсов, подсчитанное измерителем временных интервалов за время между моментом излучения сигнала запроса и моментом приема ответного сигнала маяка-ответчика, деленное на коэффициент пропорциональности. Счет тактовых импульсов начинается в момент излучения сигнала запроса маяка и прекращается в момент приема ответного импульса сигнала маяка. В момент приема ответного импульсного сигнала на пеленгатор поступает сигнал, извещающий о предстоящем поступлении сигнала пеленгования, что уменьшает вероятность пеленгования ложных импульсов. На цифровом табло корабельной аппаратуры НГС индицируется наклонное расстояние от корабля до маяка-ответчика, а на индикаторе кругового обзора штатного гидроакустического пеленгатора индицируется курсовой угол
(или пеленг) на маяк-ответчик.
Вслучае использования специального моноимпульсного пеленгатора и донного маяка-ответчика приемный тракт НГС (рис. 14.5) имеет один излучающий тракт и число приемных каналов, равное числу акустических приемников. Один из приемных каналов используется также для определения расстояния от корабля до маяка-ответчика. В состав корабельной аппаратуры входит также автоматический вычислитель координат, представляющий собой счетно-решающее устройство.
Вприемном тракте корабельной аппаратуры измеряется половинный интервал времени между моментом излучения сигнала запроса маяка-ответчика и моментом приема его ответного сигнала, а также интервалы времени между моментами появления сигналов на выходах приемных трактов (или разность фаз огибающей принимаемых сигналов, для чего в состав приемной аппаратуры вводится цифровой или аналоговый фазометр) . Индикация осуществляется на электронно-лучевой трубке, центр которой соответствует началу корабельной системы координат, а положение пятна соответствует положению донного маяка относительно корабля в корабельной системе координат.
Ввычислителе координат автоматически рассчитываются поправки на крен и дифферент, поворот осей (если расположение приемников не соответствует диаметральной и траверзной осям корабля), а также на перенос центра координат (если центр приемных баз не совпадает с центром корабельной системы координат). Последнее необходимо, например, при использовании системы с моноимпульсным пеленгатором на буровых судах, когда за центр корабельной системы координат удобно принять центр буровой установки, а акустические антенны НГС располагаются в другой части судна для уменьшения акустических помех, уровень которых наиболее высок в месте расположения буровых механизмов.
При использовании в системе донного маяка, излучающего сигналы по заданной программе, в вычислитель координат вводится вручную глубина места постановки маяка. При использовании в системе маяка-ответчика информация о расстоянии от корабля до маяка-ответчика вводится в вычислитель координат автоматически. Информация о координатах донного маяка поступает с вычислителя координат на электронно-лучевой индикатор, показания которого могут быть продублированы также цифровой индикацией.
§14.4. ДАЛЬНОМЕРНЫЕ НАВИГАЦИОННЫЕ ГИДРОАКУСТИЧЕСКИЕ
СИСТЕМЫ
В дальномерных НГС с донными маяками-ответчиками положение корабля определяется относительно установленных на дне маяков при известных координатах точек их постановки.
С корабля излучаются сигналы запроса маяков. Запросный сигнал принимается донными маяками, после чего маяки излучают ответный сигнал. Как правило, сигналы запроса одинаковы для всех маяков группы, ответные же сигналы у всех маяков различны (обычно маяки отличаются частотами ответных сигналов). Интервалы времени ∆t; между излучением сигнала запроса маяков и приемом сигнала ответа i-го маяка, деленные пополам, соответствуют наклонным расстояниям от корабля до маяков, которые
определяются по формуле |
|
|
ri = |
c∆ti |
(14.12) |
2 |
|
|
где с — средняя скорость звука на трассе распространения сигнала, м/с;. ri — наклонные расстояния от корабля до маяков, м.
Наклонное расстояние до i-го маяка гi связано с известными координатами маяка xi, yi, и zi и неизвестными координатами корабля х, у и z выражением
ri2 = (xi − x)2 + (yi − y)2 + (zi − z)2 (14.13)
Из выражения (14.13) очевидно, что для нахождения трех неизвестных координат корабля х, у, z необходимо измерить наклонные расстояния по крайней мере до трех маяков.
При использовании трех маяков положение корабля определяется как точка пересечения трех сфер с центрами в точках установки маяков и с радиусами, равными соответствующим наклонным расстояниям от корабля до маяков (рис. 14.6).
Очевидно, что если определены горизонтальные расстояния от корабля до маяков, то координаты х и у корабля определяются как точка пересечения трех окружностей, проведенных из точек установки маяков с радиусами, равными горизонтальным расстояниям от корабля до маяков.
Маяки-ответчики дальномерных НГС, как правило, устанавливаются на дне в вершинах равностороннего треугольника со сторонами до 15 км. Погрешность определения места корабля относительно маяков для таких систем определяется погрешностью определения взаимного расположения маяков на дне (размеров сторон треугольника, образованного маяками), погрешностью в определении линий по-

ложения (расстояний между кораблем и маяком-ответчиком), которая в свою очередь определяется погрешностью измерения времени распространения сигнала от маяка до корабля и погрешностью в определении скорости звука, использующейся для вычисления расстояний, а также углами пересечения линий положения. Максимальная точность определения места корабля обеспечивается в центре треугольника, образованного донными маяками, и уменьшается по мере удаления от его центра.
По иностранным источникам дальномерные НГС могут обеспечивать определение места корабля относительно донных маяков с погрешностями, составляющими несколько метров в центре треугольника, образованного маяками, и несколько десятков метров на границах дальности, действия системы.
Структурная схема дальномерной системы зависит от способа представления информации потребителю. В том случае, когда от системы требуется выдача информации о наклонных расстояниях до маяков, она состоит из трех дальномеров с раздельными измерителями временных интервалов и индикаторами расстояний в каждом канале. Схема даль номера практически не отличается от схемы тракта измерения расстояния дальномерно-пеленгационной системы. Если на дальномерную систему возлагается задача определения координат корабля, то в ее состав вводится вычислитель, выполняющий математические преобразования величин расстояния в координаты корабля. На вычислительное устройство могут быть возложены также функции усреднения флуктуации при многократных измерениях расстояний, в том числе при движении корабля, а также преобразование информации в вид, удобный для управления цифропечатающим устройством, автопрокладчиком и др.
§ 14.5. КООРДИНИРОВАНИЕ ДОННЫХ МАЯКОВ-ОТВЕТЧИКОВ
Поскольку в дальномерно-пеленгационных навигационных гидроакустических системах используются одиночные маяки-ответчики, координирование маяка-ответчика таких систем заключается в определении глубины места его постановки и его географических координат. Глубина места постановки маяка-ответчика определяется так, как это будет описано ниже для дальномерных навигационных гидроакустических систем.
Географические координаты маяка-ответчика дальномерно-пеленгационных систем определяются следующим образом. За начальные координаты маяка принимаются координаты корабля на момент сброса маяка за борт. Затем корабль последовательно занимает точки, расположенные в вершинах равностороннего треугольника, в центре которого находится маяк-ответчик. В каждой из указанных точек на корабле производится серия синхронных измерений наклонного расстояния до маяка-ответчика и
определений места корабля по космической навигационной или высокоточной радионавигационной системе. По известной глубине места постановки маяка-ответчика и измеренным наклонным расстояниям от корабля до маяка-ответчика вычисляются осредненные горизонтальные расстояния между осредиенными обсервованными местами корабля и маяком-ответчиком. Координаты маяка-ответчика рассчитываются по трем осредненным горизонтальным расстояниям из трех осредненных обсервованных мест корабля.
Перед использованием установленных на дне гидроакустических маяков-ответчиков дальномерной навигационной гидроакустической системы необходимо с максимально возможной точностью определить их взаимное расположение (расстояния между маяками) и глубину места их постановки.
Начальное значение глубины места постановки маяка может быть получено измерением глубины под килем корабля с помощью корабельного эхолота на момент сбрасывания маяка с корабля. Однако в случае неровного дна, а также в результате сноса маяка течением при его погружении на дно реальная глубина места постановки маяка может отличаться от определенной с помощью эхолота. Более высокая точность определения глубины места постановки маяка может быть получена при выполнении кораблем специального маневра над маяком, получившего название «клеверный лист» (рис. 14.7). Задача такого маневра состоит в обеспечении прохода корабля в непосредственной близости над маякомответчиком, причем в качестве глубины места при этом принимается значение минимальной наклонной дальности до маяка. Точность такого метода существенно выше, чем при определении глубины места с помощью эхолота. Так, по иностранным данным, при отстоянии корабля на 100 м от точки установки маяка погрешность определения глубины составила 2 м при глубине места 2500 м, т. е. менее 0,1% от глубины места.
При выполнении маневра «клеверный лист» могут быть определены также расстояния между маяками, если при прохождении в непосредственной близости над одним из них измерить наклонные расстояния до других маяков. Однако точность таких измерений недостаточно высока.
Более точно расстояния между маяками (базовые линии) могут быть определены методом «пересечения базовых линий», при котором корабль пересекает базовую линию приблизительно под прямым углом по возможности ближе к центру отрезка, соединяющего маяки. При движении корабля произво-
дится серия измерений наклонных расстояний до обоих маяков. Та точка траектории движения корабля, для которой сумма наклонных расстояний до маяков минимальна, находится в вертикальной плоскости, проходящей через базовую линию маяков. Длина базовой линии определяется как сумма горизонтальных расстояний, рассчитанных по измеренным наклонным расстояниям до маяков и глубинам места их постановки, определенным при выполнении маневра «клеверный лист», а также по известному заглублению акустической антенны корабельной аппаратуры НГС.
Определение глубин мест постановки маяков и их взаимного расположения посредством выполнения маневров «клеверный лист» и «пересечение базовой линии» обеспечивается с высокой точностью (со среднеквадратичной погрешностью порядка 3—5 м), однако требует больших затрат корабельного времени.
Более эффективным является итерационный метод определения взаимного расположения нескольких маяков с использованием ЦВМ.
В этом случае необходимо многократно одновременно измерить наклонные расстояния минимум до трех не лежащих на одной прямой маяков-ответчиков в процессе выполнения кораблем работ в районе установки маяков, при различных его положениях относительно маяков. При накоплении достаточного количества результатов измерений триад наклонных расстояний до маяков координаты маяковответчиков последовательно уточняются с использованием метода наименьших квадратов для получения наилучшего соответствия всех измеренных триад наклонных расстояний до маяков координатам маяков, принятым за первоначальные, при всех положениях корабля в процессе измерения расстояний. Минимальное количество точек, из которых должны быть одновременно запрошены по крайней мере три маяка, определяется равенством
M = |
3N |
(14.14) |
N − 2 |
|
где N — количество маяков.
Следует отметить, что сходимость при использовании итерационного метода не может быть гарантирована. Однако на практике решение сходится при задании в качестве начальных координат маяков координат корабля на моменты постановки им донных маяков. Начальное значение базовой линии может задаваться как путь, пройденный кораблем от точки постановки одного маяка до точки постановки следующего маяка, а за начальное значение глубины постановки могут быть приняты показания эхолота в точке постановки.
Итерационный метод может быть также применен при определении географических координат маяков. В этом случае за координаты корабля принимаются его координаты, определенные, например, с использованием космической навигационной системы на моменты измерения расстояний до маяков.
О методах координирования донных маяков, работающих по заданной программе, а также донных маяков разностно-дальномерных навигационных гидроакустических систем, в иностранных источниках не упоминается.
§ 14.6. УСТРОЙСТВО ДОННЫХ ГИДРОАКУСТИЧЕСКИХ МАЯКОВ
По принципу действия донные гидроакустические маяки подразделяются на маяки-ответчики, излучающие ответный сигнал после приема сигнала запроса, и маяки-пингеры, работающие по заданной программе. Первые позволяют определить наклонные расстояния до точек их установки путем измерения интервала времени между моментами излучения запросного и приема ответного сигнала, вторые — путем фиксации момента приема сигнала маяка при условии привязки моментов излучения сигналов к системе единого времени.
Направление на маяки обоих типов определяется путем пеленгования их сигналов с помощью направленной антенны или путем определения интервалов времени между моментами поступления сигнала маяка на пространственно разнесенные приемники.
Особенности конструктивного исполнения маяков, выпускаемых многими зарубежными фирмами, определяются глубиной их установки, способом постановки в позиционное положение, а также наличием или отсутствием необходимости их возвращения на поверхность для повторного использования.
Наибольшее распространение получили гидроакустические маяки-ответчики, которые и будут ниже рассмотрены.
Электронно-акустическая аппаратура маяка-ответчика обеспечивает прием сигнала запроса на приемоизлучающую антенну маяка и поступление его в приемный усилитель и дешифратор. Если параметры запросного сигнала соответствуют заданным, на выходе дешифратора появляется сигнал, вы-
зывающий срабатывание устройства включения канала излучения, в результате чего излучается ответный сигнал. Наибольшая выходная мощность сигналов, излучаемых донными маяками, около 50 Вт. Такое ограничение мощности излучаемых сигналов связано с естественным ограничением дальности связи с маяками за счет рефракции.
Во всплывающих маяках предусматривается дополнительный дешифратор акустической команды, поступление которой вызывает срабатывание устройства управления исполнительным механизмом отделения якоря.
С целью уменьшения вероятности ложных срабатываний, что весьма существенно, в частности, для систем обеспечения всплытия маяка, применяют кодирование сигналов запроса и команды на всплытие. Как правило, эти сигналы представляют собой последовательность тональных импульсов с различными частотами заполнения, при этом дешифраторы содержат соответствующие фильтры.
Рабочие частоты маяков зависят от требуемой дальности действия и, соответственно, глубины их постановки. Они находятся, по данным зарубежной печати, в диапазонах 25—30 кГц для глубин до 500
ми 9— 15 кГц для глубин до 6000 м.
Вкачестве акустической антенны гидроакустического маяка применяются цилиндрические или стержневые пьезокерамические преобразователи, главным образом, на основе титаната бария. Активный элемент размещается в звукопрозрачном резиновом или металлическом кожухе, заполненном электроизолирующей жидкостью (как правило, кремний-органической). В связи с тем, что пьезокерамика в такой антенне подвергается всестороннему сжатию, ее параметры не зависят от гидростатического давления. Размеры антенны определяются из условия излучения на резонансной частоте. Цилиндрический преобразователь имеет два резонанса: радиальный, определяемый диаметром цилиндра, и резонанс внутренней полости, определяемый ее высотой и диаметром. Цилиндрические преобразователи используются при необходимости работы маяка в широком диапазоне частот.
Антенны в маяках-ответчиках используются как для приема, так и для излучения сигналов. В качестве коммутационных устройств применяются диодные коммутаторы, обеспечивающие практически неограниченное количество переключений; они безынерционны и не потребляют электропитания.
Дежурный канал маяка, состоящий из приемного усилителя и дешифратора, работает непрерывно с момента постановки маяка, отключаясь только на время излучения ответного сигнала. В связи с этим к нему предъявляются очень жесткие требования по потребляемой энергии и надежности. Потребляемая дежурным каналом мощность — около 10 мВт. До недавнего времени дежурный канал гидроакустических маяков представлял собой усилитель-ограничитель с узкополосным фильтром на его выходе, подключенным к пороговому устройству. В последнее время, благодаря достижениям в разработке больших интегральных схем (БИС) на МОП-структуре, оказалось возможным электронную аппаратуру маяка строить на основе элементов цифровой вычислительной техники. Дежурный канал в этом случае представляет собой предварительный усилитель, аналого-цифровой преобразователь и цифровой фильтр. Все логические схемы в электронной аппаратуре также строятся на основе БИС. В качестве частотно-задающего элемента используется кварцевый резонатор.
Всвязи с использованием цифровой техники электронная аппаратура маяка при изготовлении не требует регулировки, обеспечивается идентичность параметров маяков и их временная стабильность. Повысилась также вибростойкость и ударопрочность аппаратуры.
Электронная аппаратура маяка размещается в прочном корпусе, выдерживающем высокое гидростатическое давление и обеспечивающем герметичность при продолжительности работы до нескольких лет. Поэтому конструкция уплотнений корпуса и кабельных вводов должна иметь высокую надежность.
Вдонных маяках широкое применение нашли хорошо зарекомендовавшие себя самоуплотняющиеся конструкции сочленений элементов корпуса и электрических вводов. В этих конструкциях уплотнительные резиновые кольца под действием наружного давления герметизируют зазор между элементами конструкции, причем с возрастанием наружного давления надежность герметизации возрастает. Для обеспечения герметизации при малых давлениях диаметр уплотнительного кольца должен на 10—15% превышать глубину канавки для его установки. Зазоры между сочлененными деталями должны быть минимальными. Для повышения надежности уплотнения и с целью исключения разгерметизации при коррозии сочленяемых деталей в месте установки кольца используют два последовательных уплотнения.
Всвязи с необходимостью обеспечения коррозионной стойкости конструкции маяка предъявляются жесткие требования к выбору материалов корпусов, покрытий и к развязкам деталей конструкции, выполненных из разных металлов.
Антенна гидроакустического маяка должна быть поднята над грунтом во избежание заиливания,
для ориентации ее характеристики направленности в пространстве, а также для увеличения зоны акустической освещенности с целью обеспечения работ глубоководных аппаратов в придонных слоях.
Подъем антенны над грунтом обеспечивается входящим в состав маяка глубоководным поплавком. В первых конструкциях донных маяков в качестве таких поплавков использовались резиновые или металлические сосуды, наполненные легкой жидкостью (бензином или керосином). Следует отметить, что такие поплавки имеют значительные габариты в связи с малым отличием плотности легких жидкостей от плотности воды, а также обладают другим не менее существенным недостатком — все легкие жидкости огнеопасны или химически агрессивны.
Всвязи с этим в качестве поплавков стали применять полые стеклянные сферы, рассчитанные на рабочие глубины до 6000 м. Так как получить равностенные полые стеклянные сферы большого диаметра весьма сложно, для обеспечения значительной подъемной силы используют поплавки, содержа-
щие до нескольких десятков стеклянных сфер диаметром 150—250 мм. Такие поплавки сравнительно дешевы и выдерживают наружное давление до 700 кгс/см2. Однако в случае разрушения на большой глубине одной из стеклянных сфер от возникающей при этом ударной волны разрушаются все сферы в поплавке. Поэтому в настоящее время в маяках часто используются поплавки из двух сочлененных полусфер из высокопрочных алюминиевых сплавов с антикоррозионными покрытиями.
За рубежом ведутся также разработки синтактных материалов для глубоководных поплавков, представляющих собой пластмассу с наполнителем в виде полых стеклянных микросфер, выдержи-
вающих высокое внешнее давление. Плотность синтактных материалов, способных работать при глубине до 6000 м, составляет 0,6—0,7 г/см3. Синтактные материалы не подвержены коррозии, легко обрабатываются, а форма поплавка из такого материала может быть произвольной, в связи с чем упрощается конструкция маяка. Однако стоимость синтактных материалов в настоящее время весьма высока.
Кроме этого, применяются стеклянные поплавки, состоящие из двух полусфер со шлифованными торцами, которые сочленяются в вакууме, в результате чего сжимаются атмосферным давлением с большой силой. После сочленения поверхность сферы по стыковой линии смазывается герметикой и закрывается защитной виниловой лентой. Для защиты от механических повреждений и удобства присоединения механических элементов сфера помещается в пластмассовый кожух с проушинами.
Донные гидроакустические маяки по конструкции разделяются на два типа — маяки однократного использования и маяки, допускающие повторное использование.
Вмаяках однократного использования, как правило, источник питания размещается в одном прочном корпусе с электронной аппаратурой, играющем в позиционном положении маяка также роль якоря, над которым с помощью поплавка поднята антенна, связанная кабелем с размещенной в прочном корпусе электронной аппаратурой.
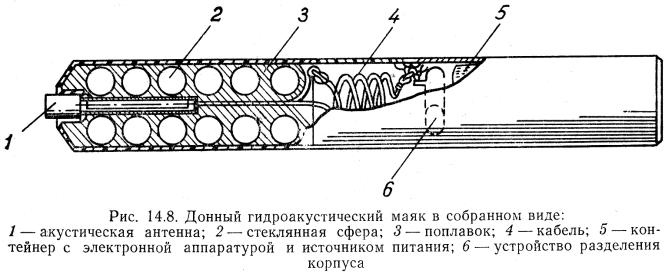
Гидроакустический маяк для удобства хранения, транспортировки и постановки в позиционное положение может быть выполнен в виде единой жесткой цилиндрической конструкции, как это показа-
но на рис. 14.8 (фирма «Bendix Corp.» США).
Цилиндрический прочный корпус с источником питания и электронной аппаратурой связан с цилиндрическим поплавком, представляющим собой легкий корпус со стеклянными сферами; съемным кожухом, внутри которого размещена бухта кабеля с тросом, предназначенным для соединения антенны, и прочного корпуса. Отделение поплавка с антенной от прочного корпуса происходит после сбра-

сывания маяка в воду при достижении им определенной глубины.
На рис. 14.9 показан используемый в настоящее время в США маяк типа ДОТ (Deep Ocean Transponder), разработанный фирмой STRAZA.
Маяк имеет диаметр 533 мм; его можно ставить с подводной лодки через торпедный аппарат. Отделение антенны от прочного корпуса осуществляется на глубине 300 м с помощью механизма, реагирующего на гидростатическое давление. Диапазон глубин мест постановки маяка составляет 300—6000 м, срок службы после постановки в позиционное положение — 1 год, масса маяка — около 1000 кг.
В нижней части прочного корпуса маяка расположено тормозное устройство в виде амортизирующего гофрированного цилиндра, необходимое для предохранения маяка от повреждений при ударе о скалистый грунт. Для амортизации могут использоваться также гидравлические устройства, принцип действия которых основан на вытекании жидкости из тормозного стакана после удара маяка о грунт.
Конструкция маяков, допускающих повторное использование, существенно отличается от конструкции маяков однократного использования. В этом случае в состав маяка вводится устройство, обеспечивающее его всплытие по команде либо по истечении определенного времени нахождения на грунте.
Маяки повторного использования имеют поплавок значительных размеров, обеспечивающий подъем прочного корпуса с электронной аппаратурой и акустической антенны над дном. Такие маяки, как правило, имеют источник питания сравнительно малой энергоемкости, обеспечивающий длительность автономной работы порядка 10—30 суток.

Внекоторых случаях в маяках повторного использования источники питания размещаются в якоре маяка и остаются на грунте при всплытии антенны и контейнера с электронной аппаратурой. В этих случаях может быть обеспечена более длительная автономная работа всплывающего маяка.
Всостав аппаратуры всплывающего маяка любой конструкции входит соединительно-разъедини- тельное устройство, соединяющее всплывающую часть маяка с якорем в нормальном положении и отсоединяющее якорь по команде на всплытие либо по истечении определенного времени пребывания маяка на дне. Для перерезания (при необходимости) кабеля, связывающего электронную аппаратуру с расположенным в якоре источником питания, в состав соединительно-разъединительного устройства входит резак, приводимый в действие при взрыве пиропатрона. Соединительно-разъединительное устройство должно обеспечивать надежную работу в морской воде и обладать высокой прочностью для обеспечения постановки маяка.
Применение всплывающих маяков ограничено в связи с тем, что:
—как правило, маяки применяются для обозначения районов в океане, в которых производятся длительные работы;
—во многих случаях существенную часть стоимости оборудования маяками районов работ в океане составляет стоимость координирования установленных на дне маяков;
—стоимость потерь корабельного времени на поиск и подъем всплывшего маяка при плохих гидрометеорологических условиях может оказаться близкой к стоимости маяка.
Восновном всплывающие маяки нашли применение для обозначения каких-либо объектов на дне океана, а также для подъема со дна регистрирующей аппаратуры с записями характеристик физических полей.
Взаключение следует отметить, что гидроакустические навигационные системы успешно используются и на мелководье, в частности, при работах по освоению континентального шельфа. С этой точки зрения большой интерес представляют дешевые маяки-ответчики разового использования, работающие на глубинах до 200 м. Эти маяки разработаны применительно к навигационной системе ATNAV-11 (Acoustic Transponder Navigation) американской фирмы AMF.
Вся электронная аппаратура маяка, включая источник питания, размещается в сферическом корпусе из ударопрочной пластмассы диаметром 360 мм. На одном из «полюсов» сферы устанавливается акустическая антенна, на другом—- рым для присоединения якорного фала. Масса маяка 9 кг, положительная плавучесть 14 кг.
Маяк поставляется с заряженным источником питания; подключение его к электронной аппаратуре осуществляется с помощью внешнего магнита, при снятии которого с корпуса маяка замыкается выключатель питания. Для предохранения аппаратуры от ударных нагрузок источник питания и блок электронной аппаратуры защищены амортизирующими прокладками. Срок службы маяка — 27 мес.
§14.7. РАДИОГИДРОАКУСТИЧЕСКИЙ МЕТОД ИЗМЕРЕНИЯ РАССТОЯНИЙ
Внавигационных целях для определения расстояния от корабля до радиопередающей станции (радиомаяка) может быть использован радиогидроакустический метод, при котором одновременно с подачей маяком радиосигнала излучается акустический сигнал в воде; принимаются эти сигналы на корабле с помощью радиоприемника и приемной гидроакустической аппаратуры.. По разности времени At между приемом радио- и акустического сигнала определяется расстояние между кораблем и фиксированной точкой:
=c0∆t (14.15)
где с0 — скорость звука в данном водном районе, м/с.
Время ∆t между приемом радио- и акустического сигналов на корабле определяется с помощью секундомера или хронометра, а также может фиксироваться с помощью записывающего устройства.
Несколько меньшая точность определения расстояния обеспечивается при использовании следующего упрощенного метода. После одновременного излучения радио- и акустического сигналов через определенные и равные промежутки времени продолжается посылка коротких радиосигналов. Интервалы времени между этими сигналами равны времени прохождения в воде акустическим сигналом определенного расстояния, например, одной мили.
Выраженная в секундах величина интервала ∆t1 между двумя следующими друг за другом радио-
сигналами будет равна
∆t1 = 1852 c0
При со=1500 м/с величина интервала ∆ti = l,23 с. Таким образом, если после приема основного радиосигнала и до момента приема акустического сигнала производить подсчет дополнительных радиосигналов, то можно определить количество миль между кораблем и передающей радиостанцией (радиомаяком).
Существует еще один способ определения расстояния от корабля до маяка: акустический сигнал посылается кораблем и воспринимается гидроакустическим приемником, размещенным в фиксированной точке расположения радиопередающего устройства. В момент поступления звукового сигнала радиопередатчик посылает кодированный радиосигнал. На корабле фиксируется время ∆t между моментами посылки акустического сигнала и приемом ответного радиосигнала. По этому времени определяется искомое расстояние.
Можно также посылать с корабля радиосигнал, который заставляет срабатывать гидроакустический излучатель, расположенный в известной фиксированной точке.
Для точного определения расстояний радиогидроакустическим методом необходимо с достаточной точностью знать скорость распространения звука в воде между излучателем и гидроакустическим приемником, а также учитывать временные задержки при срабатывании аппаратуры.
При наличии двух или трех радиогидроакустических маяков, расположенных в фиксированных точках, по измеренным радиогидроакустическим методом двум или трем расстояниям от корабля до этих маяков может быть определено место корабля в море.
В случае, если имеется три радиогидроакустических маяка, то место корабля может быть определено по разностям измеренных расстояний. Место корабля может быть определено также по радиопеленгу и расстоянию до радиогидроакустического маяка.
Раздел VI
СИСТЕМЫ
ТЕЛЕУПРАВЛЕНИЯ
СРЕДСТВАМИ
НАВИГАЦИОННОГО
ОБОРУДОВАНИЯ