

Глава 15.
ОСНОВЫ ПОСТРОЕНИЯ СИСТЕМ ТЕЛЕУПРАВЛЕНИЯ СРЕДСТВАМИ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ
§ 15.1. ОБЩИЕ ПРИНЦИПЫ ТЕЛЕУПРАВЛЕНИЯ СРЕДСТВАМИ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ
Оперативное управление техническими средствами навигационного оборудования ведется с помощью специальных телемеханических систем.
В процессе централизованного оперативного обслуживания объектов СНО выполняются следующие основные операции:
—управление основным оборудованием (включение и выключение устройств, переход на резервный комплект и т. п.);
—получение подтверждений о выполнении команд, сведений о положении различных органов настройки или коммутации (эти данные доводятся до оператора с помощью средств сигнализации, например, световых табло, звонков и др.);
—измерение важнейших величин, характеризующих состояние аппаратуры и режим ее работы;
—регулирование величин, которое сводится к нажатию кнопки БОЛЬШЕ или МЕНЬШЕ, включающей реле питания исполнительного двигателя.
Все перечисленные операции управления, сигнализации, измерения и регулирования реализуются в отдельных системах в различной степени путем установления связи между пультом управления и соответствующими исполнительными элементами оборудования или измерительными приборами.
Дистанционное управление, выполняемое диспетчером пункта управления, реализуется с помощью средств телеуправления (ТУ), телесигнализации (ТС), телерегулирования (ТР) и телеизмерений (ТИ). Средства телеизмерений называют средствами телеметрии, а при использовании радиоканалов — радиотелеметрии (РТМ). Телеконтроль (ТК) включает телесигнализацию и телеизмерения. Все эти средства требуют гораздо меньшего количества каналов связи, чем количество объектов управления или контроля.
Весь комплекс средств называется также средствами телемеханики.
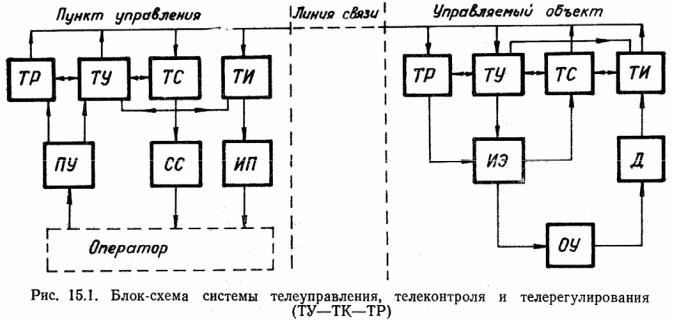
Блок-схема системы телеуправления, телеконтроля и телерегулирования (ТУ—ТК—ТР) приведена на рис. 15.1.
Управляет работой системы оператор со специального пункта управления. Сигналы управления, контроля и регулирования передаются по линии связи. В качестве линий связи могут использоваться как кабельные линии, так и радиосредства связи, работающие главным образом в ультракоротковолновом диапазоне.
Средства телеуправления ТУ предназначены для передачи по каналам связи команд, которые на
управляемом объекте воздействуют на соответствующие исполнительные элементы ИЭ, входящие, как правило, в систему управления, блокировки и сигнализации. В соответствии с командой происходит включение, выключение, переход на резерв объекта управления ОУ. Запуск системы телеуправления и подача команды производится с пульта управления ПУ.
На передающем конце (пункте управления) в функцию аппаратуры 1У входит образование сигналов, соответствующих коду команды Эти функции выполняет шифратор. Сигнал, состоящий, как правило, из нескольких импульсов, передается в линию связи в определенной последовательности, которая обеспечивается распределительными узлами аппаратуры. Сигнал расшифровывается в управляемом объекте дешифратором, который образует цепь к исполнительному органу, предусмотренному принятой командой.
Средства телесигнализации ТС после выполнения команды формируют исполнительный сигнал. Переданный на пункт управления сигнал расшифровывается и поступает к средствам сигнализации СС, которые извещают о выполнении команды. Кроме того, средства сигнализации используются для передачи данных о состоянии объектов, не управляемых непосредственно, например, для передачи аварийного сигнала, характеризующего нарушение связи или аварийное состояние аппаратуры. При управлении рассредоточенными объектами система сигнализации подает квитирующий сигнал о приеме команды вызова данного пункта по системе телеуправления.
Система телеизмерений ТИ обеспечивает получение в пункте управления данных о показаниях различных измерительных приборов, характеризующих режим работы аппаратуры управляемого объекта Измеряемые величины могут иметь различную физическую природу, например температуру, влажность и др. Эти величины предварительно преобразуются с помощью датчиков Д в напряжение. В пункте управления измеряемые величины регистрируются измерительными приборами ИП
Средства телерегулирования ТР позволяют плавно изменять уровень величины или состояние какого-либо объекта. Регулирование можно производить с помощью системы телеуправления, посылая команду на включение исполнительного двигателя, а затем на его выключение.
При проектировании системы ТУ—ТК—ТР стремятся к возможно более полному использованию технических узлов и сокращению их количества за счет рационального построения сигналов управления и контроля, их универсальности, к выполнению одними и теми же узлами нескольких функций.
В процессе разработки систем ТУ—ТК—ТР должны быть обеспечены быстрота передачи и исполнения команд управления и контроля, необходимая емкость системы, надежность передачи и исполнения команд, а также экономичность системы.
Скорость передачи и исполнения определяется выбором вида сигналов управления и контроля (видом кода), способом передачи, схемой' исполнительного устройства и быстротой срабатывания элементов.
Емкость системы характеризуется возможностью управления или контроля некоторого количества объектов, т. е. количеством различных команд управления или контроля, которые в состоянии передать система.
Надежность работы системы определяется аппаратурной надежностью, ее бесперебойной работой и точностью выполнения команд управления и контроля в условиях помех и изменения характеристик линии связи и аппаратуры.
§ 15.2. МЕТОДЫ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ (КОНТРОЛЯ) И ПРИНЦИПЫ ТЕЛЕИЗМЕРЕНИЙ
В дистанционных системах управления и контроля в настоящее время используется главным образом дискретная техника связи. Передача команд и сведений об их исполнении или состоянии управляемых объектов производится сигналами, имеющими форму импульсов тока (напряжения). Как правило, передаваемая информация ограничивается лаконичными сообщениями типа: «Включить», «Выключить», «Включено», «Выключено», «Больше», «Меньше» и т. п. Каждая команда передается одним или несколькими импульсами.
Признаки импульсных сигналов
Различные параметры импульсов называют импульсными признаками, а величины параметров— значениями признаков. Придавая импульсам различные признаки и различные величины этих признаков, обеспечивают возможность передачи содержания команды по необходимому адресу.
При выборе того или иного признака учитывают возможность передачи сигналов по имеющемуся каналу (линии) связи, их помехоустойчивость, простоту формирования сигнала и распознавания признака на приемном конце, а также возможное число значений признака.
Признаками сигнала являются интенсивность, время или частота импульсов (рис. 15.2). В соответствии с этим могут быть использованы параметры: амплитуда, полярность, длительность и время возникновения импульсов, фаза переменного тока, частота заполнения или частота самих импульсов, их число в цикле и скважность. Можно придавать импульсам несколько признаков, например, изменять длительность и частоту заполнения. В этом случае получаются комбинированные импульсные признаки.
Импульсы, содержащие команду, могут передаваться одновременно или последовательно, образуя соответственно сигналы с параллельной или последовательной структурой. Продолжительность передачи команды называется циклом передачи сигнала.
При последовательной передаче импульсы разделяются паузами или импульсами определенного значения, а могут и не разделяться вообще. В последнем случае сокращается время одного цикла передачи.
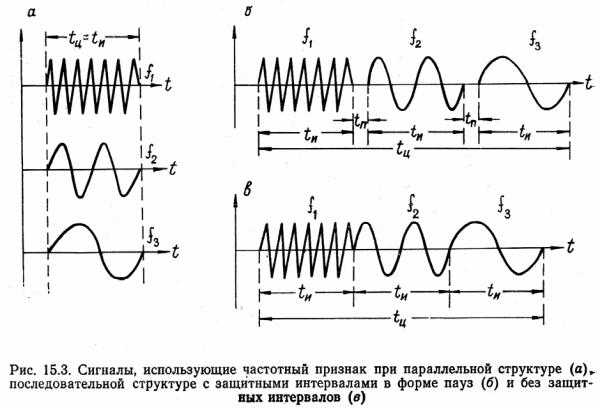
На рис. 15.3 показаны сигналы, использующие частотный признак при параллельной структуре (а), при последовательной структуре с защитными интервалами в виде пауз (б) и без защитных интервалов (в).
Длительность цикла передачи tц в значительной степени определяет скорость передачи. При параллельной структуре tц ≈ tи при последовательной с защитными элементами tц = ntи + (n - 1)tП и при последовательной без защитных элементов tц = ntи, где tи — длительность импульса; tn —длительность паузы; п — число импульсов в сигнале.
При формировании сигналов команд из одного импульса сокращается длительность цикла передачи, но и ограничивается возможное количество команд N величиной
m |
|
N = ∑ki |
(15.1) |
i=1 |
|
где ki — количество значений, которое может быть придано i-му признаку; i — количество реализуемых импульсных признаков.
Как правило, с целью повышения помехоустойчивости системы, а также простоты формирования и дешифровки сигнала, используют только два значения признака, например, положительную и отрицательную полярности тока, две различные длительности импульсов и др. Исключением из этого правила является частота, которой придают много значений.
Используя для передачи команды сигнал из п импульсов и применяя при этом те или иные импульсные признаки, можно увеличить возможное количество команд. Так, например, при постоянном количестве импульсов в сигнале каждой команды и при двух значениях импульсного признака возможное количество команд N = kn = 2n.
Емкость системы телеуправления и телеконтроля, т. е. максимальное количество команд, которое может быть передано, возрастает с увеличением количества импульсов в сигнале и количества признаков, придаваемых каждому импульсу. Значение импульсного признака, при котором происходит срабатывание исполнительного устройства в месте приема, называется выбирающим признаком.
Принципы разделения (селекции) импульсных сигналов
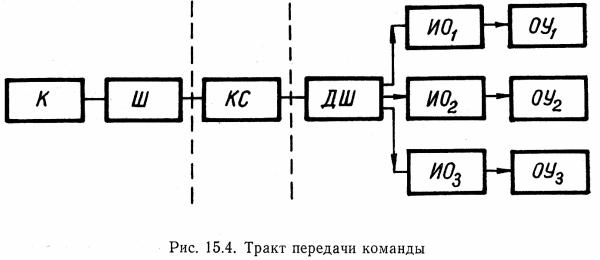
В общих чертах схема передачи команд и приема их представлена на рис. 15.4. Команда К формируется в соответствующий распорядительный или исполнительный сигнал с помощью шифратора Ш и подается в канал связи КС. На приемной стороне сигнал поступает в дешифратор ДШ, где преобразуется в исполнительный сигнал, воздействующий на исполнительный орган ИО того или иного объекта управления ОУ.
Для того, чтобы на приемном конце расшифровать смысл команды, регистрируется каждый импульс сигнала и производится их разделение. При этом используются методы пространственного (схемного), частотного и временного разделения импульсов, образующих сигнал команды.
Каждому импульсу сигнала присваивается свой порядковый номер и закрепляется либо определенная физическая цепь, либо определенная частота тока, посылаемого по линии связи, либо временной
интервал.
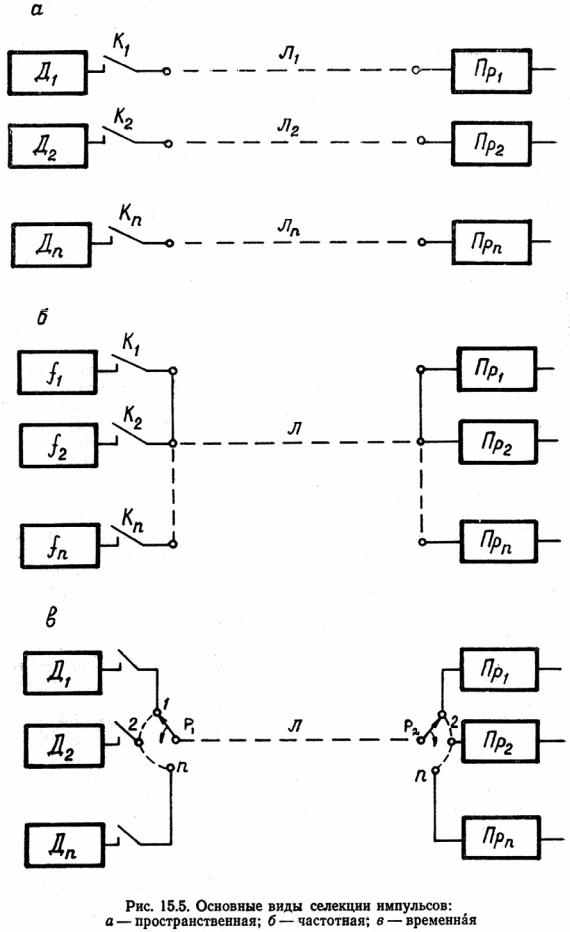
Принципы реализации пространственной, частотной и временной селекции показаны на рис. 15.5. При пространственном разделении (рис. 15.5, а) каждый i-й импульс формируется датчиком импульсов Дi, посылается после нажатия ключа Ki по своей линии Jli и расшифровывается приемником Пpi. Количество линий равно количеству импульсов, используемых для формирования команд.
При частотном разделении (рис. 15.5, б) импульсы передаются по общей линии Л сигналами, имеющими различные частоты. Приемные устройства импульсов имеют узкополосные фильтры, настроенные на частоты различных импульсов.
Временное разделение импульсов (рис. 15.5, в) предполагает их последовательную передачу по общей линии Л. Для этого каждый датчик импульса с помощью распределителей P1 и Р2 соединяется линией со своим приемником поочередно. В качестве распределителей могут использоваться электромеханические (типа шаговых или релейных), транзисторные и ламповые схемы. Необходимая синфазность поддерживается равномерным движением распределителей, на которые для этого подаются специальные тактовые импульсы. Однако большую надежность при изменяющихся внешних условиях обеспечивает шаговое движение распределителя, при котором его переход в следующее положение производится с помощью посылки специального импульса движения.
Методы разделения (избирания) команд
Помимо передачи содержания команды необходимо, чтобы ее выполнило то исполнительное устройство, которому она адресована. Эта задача в условиях использования общего канала связи для передачи сигналов решается применением различных методов разделения (избирания): качественного, распределительного, комбинационного, комбинационно-распределительного и распределительного с групповым выбором.
При качественном методе разделения каждая команда передается сигналом, состоящим из одного импульса. Различным командам соответствуют различные импульсные признаки или различные значения признака. Этот способ сравнительно прост, он обеспечивает высокую скорость передачи, однако емкость системы при этом получается небольшой.
Выбор исполнительной цепи может также определяться по соотношению значений импульсных признаков двух поочередно передаваемых импульсов или соотношением значений импульсного признака сигнала и значения опорного сигнала, который имеет дополнительные признаки, позволяющие отделить его от сигнальных импульсов. В некоторых случаях опорный сигнал передается по отдельному каналу. При кодировании адреса исполнительной цепи отношением амплитуд пары соседних импульсов уменьшаются искажения от медленных изменений уровня сигнала, поскольку при этом пропорциональные изменения амплитуд не нарушают их соотношения.
При распределительном (временном) методе разделения команды, формируемые на передающем конце, поочередно передаются в соответствующие исполнительные устройства по общей линии связи подобно тому, как передаются отдельные импульсы команды (см. рис. 15.5, в).
За время цикла передаются команды во все исполнительные устройства, при этом увеличивается время передачи сообщений и усложняется приемное устройство.
Если распределитель имеет п контактов (позиций) и для формирования команд используют nГ им-
пульсных признаков, то общее количество команд составляет |
|
N = (m −1)n |
(15.2) |
При передаче команд типа «Да», «Нет» или «Включить», «Выключить» количество импульсов можно уменьшить почти вдвое, передавая сначала содержание приказа, а затем уже номер той цепи, которая должна выполнить этот приказ. Для этого первый и второй импульсы отображают соответственно команду типа «Включить», «Выключить», а остальные — номера исполнительных цепей.
При простом комбинационном (кодовом) методе разделения каждый сигнал сообщения комбинируется из нескольких импульсов, кодирующих номер исполнительной цепи или исполнительного реле. При простом комбинационном методе импульсы передаются по различным каналам связи. Число требуемых линий равно числу элементов кода, а число значений импульсного признака, используемого при формировании импульсов,— основанию кода. Количество команд, которое может быть передано при k значениях импульсного признака и п линиях, составляет
N = k n |
(15.3) |
Так, например, при использовании двух значений признака (положительная и отрицательная полярности токовых посылок и т. п.) количество различных команд будет составлять N = 2n.
При комбинационно-распределительном методе разделения, в отличие от простого комбинационного метода, при котором импульсы, кодирующие команду, передавались по различным цепям или каналам связи, сигналы передаются поочередно по одному общему каналу. Количество различных команд, которое может быть передано, определяется выражением (15.4), в котором величина п определяет
количество импульсов, образующих кодовую комбинацию. |
(15.4) |
N = 2n |
По сравнению с распределительным методом разделения при одном и том же возможном количестве команд сокращается количество импульсов, передаваемых за цикл передачи, т. е. увеличивается скорость передачи и одновременно улучшается использование каналов связи, уменьшается их количество.
При распределительном с групповым набором методе разделения коммутация необходимой исполнительной цепи происходит последовательно несколькими ступенями селекции. Все исполнительные цепи делятся на группы, число которых равно числу возможных позиций искателя (коммутатора) первой ступени селекции. Каждая группа делится па подгруппы, число которых равно числу позиций искателей второй ступени селекции. Аналогично подгруппы разделяются на подподгруппы и т. д. В общем случае при однотипных искателях получают п ступеней селекции при m позициях у каждого искателя.
С помощью сигнала команды сначала выбирается группа (работает система коммутации первой ступени селекции), потом подгруппа и т. д.. Сигнал кодирует номер исполнительной цепи и имеет число групп импульсов, равное числу ступеней селекции.
При заданном числе импульсов в сигнале команды наибольшее возможное количество исполнительных цепей может быть получено при одинаковом количестве позиций на всех ступенях селекции, т. е. число групп должно быть равно числу подгрупп, а число подгрупп — числу исполнительных цепей в подгруппе и т. д. Число различных команд, которое может быть принято при п ступеней селекции и m позиций искателя, определяется выражением
N = mn |
(15.5) |
Принципы телеизмерений
Для обеспечения нормального функционирования различных телеуправляемых объектов необходимо измерять параметры, характеризующие качество их работы. Эти измерения проводятся по заданной программе или по специальной команде, переданной средствами ТУ. Данные измерений с помощью средств телеизмерений поступают в пункт управления.
Важнейшим требованием, предъявляемым к системе телеизмерений,, является точность измерений. Информация о величинах измеряемых параметров может передаваться всеми способами, которыми передается по линиям связи любая другая информация. Требование высокой точности передачи вызывает дополнительные трудности.
Взависимости от вида параметра сигнала, несущего информацию,, различают системы интенсивности и импульсные.
Всистемах интенсивности измеряемую величину отображает амплитуда тока или напряжения в проводных и кабельных линиях связи.
Низкая помехоустойчивость и влияние параметров линии связи ограничивают применение этого способа использованием его для телеизмерений на небольших расстояниях, примерно до 25 км при ка-
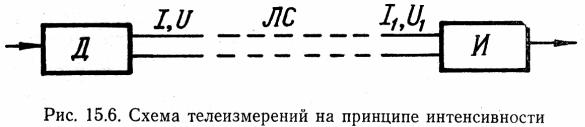
бельных линиях связи (рис. 15.6).
Система телеизмерений на передающей стороне содержит датчик измеряемой величины Д, линию связи ЛС и измерительный прибор И в пункте контроля. Датчик преобразует измеряемую величину в пропорциональную величину постоянного тока и напряжения I и U. Ток и напряжение на выходе линии и U\ питают измерительный прибор И, показания которого Ai должны быть равны измеряемой величине А.
Наиболее распространены датчики-преобразователи рода тока и потенциометрические датчики. Первые преобразуют энергию сигналов в точке измерений в энергию постоянного тока так, что напряжение (ток) последнего оказывается пропорциональным измеряемому параметру. Потенциометрические датчики преобразуют механическое перемещение первичного измерителя в напряжение, которое снимается с потенциометра.
Недостатком указанных систем является зависимость показаний прибора И от сопротивления линии связи и напряжения, питающего датчик Д. Изменения того и другого приводят к погрешностям телеизмерений.
Этот недостаток отсутствует в схемах телеизмерений, использующих в качестве информационного параметра соотношение двух токов, изменение которых под действием дестабилизирующих факторов в одинаковое число раз не изменяет их соотношения и не вносит погрешности в телеизмерения.
Вимпульсных системах телеизмерений передаваемое значение измеряемой величины характеризуется числом импульсов (число-импульсная система) или определенной комбинацией импульсов (ко- дово-импульсная система). В обоих случаях каждое значение отображается конечным числом импульсов, в связи с чем передаются не любые возможные значения величины, а только вполне определенные возможные уровни. Если наибольшее значение измеряемой величины разделить на N, то возможность передачи информации о каждом из них будет означать возможность передачи N чисел от 0 до N— 1. Чем большее количество различных уровней требуется передавать, тем меньше относительная и абсолютная погрешности телеизмерений, но тем большее количество чисел должно быть закодировано в процессе обработки данных измерений.
Вчисло-импульсной системе передача N уровней означает формирование и передачу сигнала из N импульсов при наибольшей измеряемой величине.
Передающая часть указанной системы может представлять собой электромеханическое устройство, прерывающее электрическую цепь число раз, пропорциональное углу отклонения первичного измерительного устройства. Могут использоваться и электрические схемы, состоящие из генератора импульсов и ключевой схемы, отпирающей цепь на время, пропорциональное величине измеряемого параметра.
Приемными измерительными устройствами могут служить различного типа счетчики импульсов, проградуированные в значениях измеряемой величины.
§15.3. НАЗНАЧЕНИЕ, СОСТАВ И ПРИНЦИП ДЕЙСТВИЯ СИСТЕМЫ СТУМ-62
Рассмотрим принцип действия одной из первых отечественных систем телеуправления маяками СТУМ-62. Принципы, положенные в основу ее построения, в той. или иной степени могут найти применение в аналогичных системах более поздних лет разработок.
Система телеуправления средствами навигационного оборудования СТУМ-62 предназначается для управления действием и контроля за работой комплексных и одиночных объектов навигационного оборудования.
Всистему входят следующие основные узлы:
—аппаратура командного пункта;
—аппаратура ретрансляционного исполнительного пункта;
—аппаратура оконечного исполнительного пункта.
Командный пункт (КП) устанавливается, как правило, недалеко от управления района гидрографической службы, обеспечивается хорошей и надежной связью с ним. На командном пункте устанавливаются датчик телеуправления и аппаратура контроля.
Ретрансляционный исполнительный пункт (РИП) устанавливается на автоматизированных комплексных объектах навигационного оборудования, включающих световой маяк, радиомаяк и наутофон. Аппаратура РР1П, принимая переданный по каналам связи сигнал, или передает его по каналу связи на следующий РИП — ретранслирует сигнал, или, если сигнал предназначается для данного РИП, передает его в исполнительное устройство данного РИП.
Оконечный исполнительный пункт (ОИП) устанавливается на автоматизированных одиночных объектах навигационного оборудования: навигационных огнях, маркерных радиомаяках, наутофонных установках.
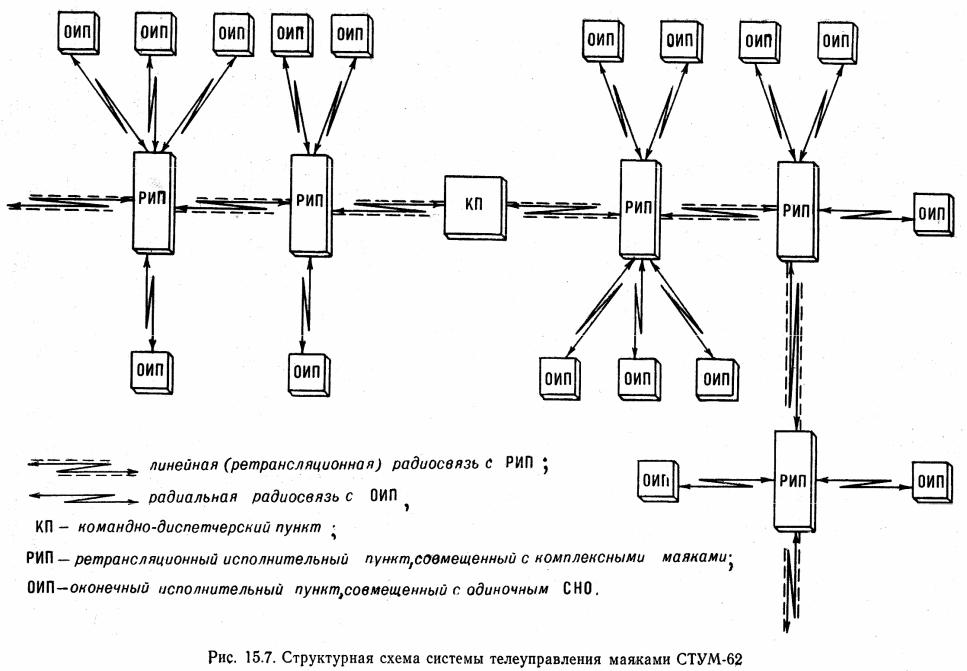
Организация линий связи и телемеханического управления строится по двухступенчатому признаку. В первую ступень входят все РИП, линия связи между которыми для передачи сигналов телеуправления строится по линейной схеме от КП к РИП и от РИП к РИП. Во вторую ступень входят все ОИП, которые расположены в районах соответствующих РИП и управляются через них по радиальной системе.
Такой принцип организации связи называется линейно-радиальным или линейно-циркуляцион-
ным (рис. 15.7).
Таким образом,
—линия связи между КП и РИП, если он не является ближайшим к КП, может быть организована только через промежуточные РИП;
—линия связи между КП и ОИП может быть организована только через соответствующий РИП.
Всостав системы для организации линий связи входят приемопередающие устройства, в которых используются антенны типа «волновой канал» с остротой диаграммы излучения в пределах от 50 до 78°. На КП устанавливаются две антенны указанного типа. Направление действия первой антенны, соответствующее максимуму ее излучения, условно называют левым направлением, а РИП, расположенные по этому направлению,— РИП левой стороны. Соответственно направление действия второй антенны условно называют правым направлением, а РИП, расположенные по этому направлению, — РИП правой стороны.
Далее показано, что при организации линии связи между КП и данным РИП левой или правой стороны в линию связи выдается один и тот же сигнал. Поэтому для исключения взаимных помех левое и правое направления должны быть разнесены на определенный угловой интервал. Величина этого интервала определяется остротой диаграммы излучения антенн, используемых на КП. Очевидно, что оптимальным угловым интервалом будет угол, равный 180°, между левым и правым направлениями.
Всистему СТУМ-62 может быть включено до 10 РИП — по 5 РИП в каждом направлении. К каждому из РИП может быть подключено па 5 ОИП.
Таким образом, с помощью системы можно управлять работой 10 комплексных и 50 одиночных объектов навигационного оборудования и вести за ними контроль. Система позволяет на каждый ретрансляционный исполнительный пункт послать 18 команд и получить с него 23 сигнала о состоянии оборудования, из которых 5 сигнализируют о состоянии оконечных исполнительных пунктов. На каждый оконечный исполнительный пункт через РИП можно послать 2 команды «Включить», «Выключить» и получить сигнал «Включен», «Выключен».
Кроме сигналов телесигнализации с каждого РИП и ОИП можно получить слуховой контроль характеристик работы СНО. С РИП можно получить до четырех характеристик и с ОИП — одну характеристику. Для организации канала связи между КП и РИП применяется радиорелейная связь, а между РИП и ОИП — дуплексная радиосвязь, которая всегда осуществляется с помощью специально разработанной радиостанции, максимальная дальность действия которой достигает 35—40 км. Для организации радиорелейной связи между КП и РИП и между РИП—РИП может быть применена серийная высокочастотная аппаратура служебной связи большей мощности.
Организация радиорелейной связи между РИП на радиостанциях, входящих в систему, является частным случаем решения этого вопроса. Их применение для этих целей ограничивается следующими требованиями:
—расстояние между РИП должно быть не более 35 км;
—между точками подвеса антенн должна быть обеспечена прямая географическая видимость;
—количество переприемов на участке должно быть не более четырех.
При несоблюдении любого из указанных выше условий для организации радиорелейной связи должна применяться только серийная аппаратура служебной связи большей мощности.
Система связи обеспечивает два дуплексных канала — один для передачи телемеханических сигналов и второй для организации телефонного служебного канала, дающего возможность связаться с любого РИП и ОИП с командным пунктом. Разделение телефонного и телемеханического каналов производится аппаратурой низкой частоты, которая входит в состав системы.
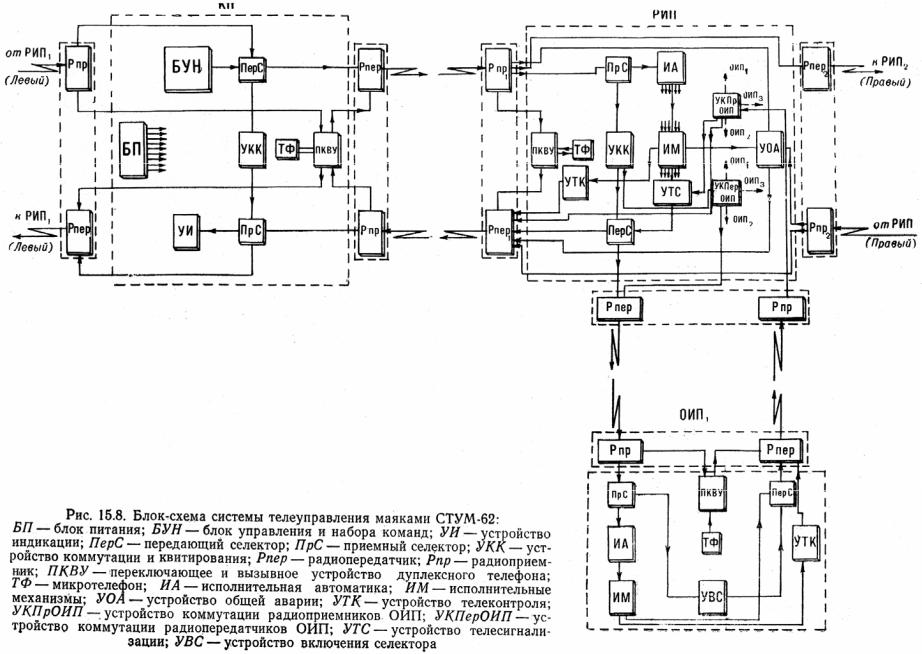
Блок-схема СТУМ-62
По выполняемым функциям и конструкции все РИП и ОИП, входящие в СТУМ-62, аналогичны между собой. В связи с этим на блок-схеме (рис. 15.8) представлены единый для всей системы КП, один РИП и один ОИП.
В состав аппаратуры КП входят (см. рис. 15.8):
—блок управления и набора команд БУИ, состоящий из пульта управления, наборных устройств и устройства индикации выданных команд;
—передающий селектор ПерС, состоящий из блока генераторов комбинационных тональных частот
иблока формирования и выдачи кода;
—устройство коммутации и квитирования УКК, состоящее из блока выдачи частот кода команды передающему селектору.
При посылке с КП первой частоты кода с РИП поступает ответная частота (частота квитирования). Это служит сигналом, что первая посылка частоты принята РИП. После приема частоты квитирования выдается вторая частота кода;
—два радиопередатчика Рпер ультракоротковолнового диапазона для правого и левого направлений с фидерно-антенными устройствами типа «волновой канал». Поля антенн поляризованы в плоскостях, согласованных с полями поляризации соответствующих приемных антенн РИП справа и слева от КП;
—два радиоприемника Рпр ультракоротковолнового диапазона для правого и левого направлений с фидерно-антенными устройствами типа «волновой канал»;
—приемный селектор ПрС, состоящий из набора фильтров комбинационных тональных частот и устройств дешифрирования кодов команд;
—устройство индикации, состоящее из светового табло с элементами отображения набранных команд и сигналов телесигнализации ТС о состоянии контролируемых СНО, блока слухового контроля параметров СНО, блока отображения сигналов об общей аварии при нарушении исправного состояния СНО или линии управления;
—переключающее и вызывное устройство дуплексного радиотелефона ПКВУ, состоящее из элементов, обеспечивающих вызов любого из РИП, дуплексную телефонную связь с ним, а также прием сигналов вызова от РИП или ОИП;
—блок питания БП, обеспечивающий номинальные напряжения для питания всей аппаратуры КП. Конструктивно все блоки аппаратуры КП размещены в общем пульте управления за исключением
двух приемопередатчиков, которые монтируются на стене в помещении КП. Антенные устройства устанавливаются на крыше здания КП или типовых мачтах, предназначенных для антенн радиомаяков.
Аппаратура КП обеспечивает выполнение следующих операций:
— вызов любого из РИП и через него вызов любого из ОИП, который фиксируется на световом таб-
ло;
—выдачу сигнала телеуправления на любой из РИП или ОИП;
—запрос по телесигнализации о техническом состоянии любого из РИП или ОИП;
—индикацию на световом табло состояния основных видов оборудования телеуправляемых средств;
—световую и звуковую индикацию при неисправности любого из контролируемых СНО или линии телеуправления;
—контроль на слух по линии радиотелефонной связи четырех характеристик работы СНО с РИП и одной характеристики с ОИП. В состав аппаратуры РИП входят (см. рис. 15.8):
—радиоприемники Рпр ультракоротковолнового диапазона с фидерно-антенными устройствами, с поляризацией полей в плоскостях, согласованной с поляризацией полей антенн передатчиков КП, РИП или ОИП, которые соответственно должны быть связаны с данными радиоприемниками;
—приемный селектор Пр.С, состоящий из набора фильтров комбинационных тональных частот и
устройств дешифрирования кодов;
—устройство коммутации и квитирования УКК, состоящее из блока, обеспечивающего выдачу частот квитирования передающему селектору, аналогично УКК командного пункта, а также из блока, обеспечивающего автоматическую коммутацию радиальной радиолинии РИП—ОИП с радиолинией РИП—КП для осуществления прямой связи ОИП—КП через схему коммутации соответствующего приемника РИП и для связи КП—ОИП через схему коммутации соответствующего передатчика РИП;
—элементы исполнительной автоматики ИА, управляющие исполнительными механизмами посредством выдачи электрических импульсов, соответствующих значениям команд ТУ, переданных на РИП с КП,
—исполнительные механизмы ИМ устройств автоматики;
—передающий селектор Пер.С, состоящий из блока генераторов комбинационных тональных частот и блока формирования и выдачи кода;
—устройство телеконтроля УТК, состоящее из тонального генератора, релаксатора выдержки времени и элементов соединения с исполнительными механизмами;
—устройство телесигнализации УТС о состоянии управляемых СНО;
—устройство контроля исправности исполнительных механизмов и линии управления — при нарушении исправности на КП автоматически передается сигнал общей аварии ОА;
—переключающее и вызывное устройство ПКВУ дуплексного радиотелефона, состоящее из элементов, обеспечивающих вызов КП, прием сигналов вызова с КП и дуплексную телефонную связь с КП;
—радиопередатчики ультракоротковолнового диапазона с фидерно-антенными устройствами, с поляризацией полей в плоскостях, согласованных с плоскостями поляризации антенн, связанных с данными РИП и ОИП, РИП и КП правого и левого направления.
Аппаратура РИП обеспечивает выполнение следующих операций:
—прием вызова с КП и коммутацию линии КП—РИП;
—прием команд ТУ с последующей выдачей частот квитирования,, расшифровку принятых команд ТУ и выдачу соответствующих импульсов исполнительным механизмом СНО;
—коммутацию линии КП на любой из ОИП, обслуживаемых данным РИП;
—формирование и выдачу на КП сигнала общей аварии;
—ретрансляцию транзитных сигналов ТУ, ТС, ТК, ОА;
—формирование и выдачу в линию РИП—КП сигналов ТС и ТК о состоянии контролируемых
СНО;
—прием и накопление информации о состоянии СНО на ОИП;
—вызов КП, принятие вызова с КП и дуплексную радиотелефонную связь с КП.
Всостав аппаратуры ОИП входят (см. рис. 15.8):
—радиоприемник Рпр ультракоротковолнового диапазона с антенно-фидерным устройством, с поляризацией поля антенны, в плоскости, согласованной с антенной передатчика РИП, связанного с данным ОИП.
—приемный селектор ПрС, включающий набор фильтров комбинационных тональных частот и устройство дешифрирования кодов команд,, подаваемых на ОИП;
—устройство квитирования УК, обеспечивающее выдачу частот квитирования через передающий селектор, аналогично УКК на РИП (вместе с устройством включения селектора УВС);
—элементы исполнительной автоматики ИА, управляющие исполнительными механизмами путем выдачи органам управления СНО импульсов, соответствующих значениям команд ТУ, переданных на ОИП с КП;
—передающий селектор ПерС, включающий блок генераторов комбинационных тональных частот
иблок формирования и выдачи кода;
—устройство телеконтроля УТК, включающее тональный генератор,, релаксатор выдержки времени и элементы соединения с исполнительными механизмами;
—исполнительные механизмы ИМ устройств местной автоматики СНО;
—переключающее и вызывное устройство ПКВУ дуплексного радиотелефона, обеспечивающее вызов и дуплексную телефонную связь с КП;
—радиопередатчик Рпер с антенно-фидерным устройством, с поляризацией поля антенны в плоскости, согласованной с поляризацией поля антенны приемника РИП, связанного с данным ОИП.
Аппаратура ОИП обеспечивает выполнение следующих операций:
прием вызова с КП и коммутацию линии КП—ОИП через соответствующий РИП;
—прием команд ТУ с выдачей частот квитирования, расшифровку принятых команд ТУ и выдачу соответствующих импульсов исполнительным механизмам СНО;
—формирование и выдачу на РИП сигналов ТС о состоянии контролируемого оборудования;
—формирование и выдачу в линию ОИП—РИП—КП сигнала ТК о работе СНО;
—формирование и выдачу в линию ОИП—РИП—КП сигнала об аварии в работе СНО;
—вызов КП и дуплексную радиотелефонную связь с КП.
Принцип действия системы телемеханики
Система телемеханики СТУМ-62 состоит из четырех элементарных систем:
—телеуправления (ТУ);
—телесигнализации (ТС);
—общеаварийной сигнализации (ОА);
—телеконтроля (ТК).
Всистеме выбран частотно-кодовый принцип шифровки передаваемых сигналов, который допускает организацию передачи циркулярных команд и дает возможность легко организовать вызов станций. Принята наиболее простая система двухчастотного кода, когда каждая комбинация передается при помощи двух посылок разных частот, следующих друг за другом.
Все управление производится с одного командного пункта (КП), в двух направлениях связи, в каждом направлении могут управляться до 5 РИП и 25 ОИП.
Обслуживание РИП и ОИП производится по вызывной коммутационной системе. Каждый РИП одного направления имеет свой вызывной код, для вызова РИП разных направлений связи используется одинаковый код, посылка которого производится в соответствующем направлении. Каждый ОИП вызывается командой коммутации через РИП, к которому он принадлежит. Такая коммутационная система дает возможность работать с 25 ОИП одного направления связи при 5 командах коммутации.
Для работы системы телемеханики выделен спектр звуковых частот от 3 до 6 кГц. В этом спектре используются 14 частот: 3,3; 3,5; 3,7; 3,9; 4,1; 4,3; 4,5; 4,7; 4,9; 5,1; 5,3; 5,5; 5,7 и 5,9 кГц.
Система телеуправления ТУ предназначается для управления работой РИП и ОИП.
С командного пункта на каждый ретрансляционный исполнительный пункт может быть послано 18 команд телеуправления, 5 команд коммутации оконечных исполнительных пунктов, одна команда запроса телесигнализации и одна команда для вызова персонала РИП к телефону. Таким образом, общее количество команд, посылаемых на ретрансляционные исполнительные пункты, равняется 25.
На каждый ОИП посылаются только две команды. Каждая команда состоит из двух посылок тональной частоты. Для передачи команд используется шесть частот: 3,9; 4,1; 4,3; 4,5; 4,7 и 4,9 кГц. Путем комбинации определенным образом этих частот и получают серию из двух сигналов (код), соответствующих определенной команде. Каждая из указанных частот условно обозначается порядковым номером по мере их возрастания: 3,9 кГц—1; 4,1 кГц—2; 4,3 кГц—3; 4,5 кГц—4; 4,7 кГц—5; 4,9 кГц—6.
Составим все возможные комбинации из этих частот (табл. 15.1).
Таблица 15.1
|
Прямая комбинация |
|
Обратная комбинация |
||||||
|
|
|
|
|
|
|
|
|
|
1—2 |
1—3 |
1—4 |
1—5 |
1—6 |
2—1 |
3—1 |
4—1 |
5—1 |
6—1 |
2—3 |
2—4 |
2—5 |
2—6 |
|
3—2 |
4—2 |
5—2 |
6—2 |
|
3—4 |
3—5 |
3—6 |
|
|
4—3 |
5—3 |
6—3 |
|
|
4—5 |
4—6 |
|
|
|
5—4 |
6—4 |
|
|
|
5—6 |
|
|
|
|
6—5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Примечание. В таблицу не включены комбинации типов 1—1, 2—2, 3—3, 4—4, 5—5 и 6—6, которые не используются в системе СТУМ-62.
Как видно из табл. 15.1, из шести частот составляется тридцать комбинаций. Каждая комбинация отличается от любой другой как частотным признаком импульсов, так и порядком их следования. Например, комбинация 1-2 означает, что в первой посылке идет частота 1 (3,9 кГц), а во второй; частота 2 (4, 1 кГц). Если в комбинации первой посылается частота меньшая по номиналу, а второй— более высокая, то такая комбинация условно называется прямой. Если в комбинации первой посылается частота, большая по номиналу, а затем меньшая, то комбинация называется обратной. Таким образом, комбина-
ция 1—2 будет прямой, а комбинация 2—1 —обратной.
Комбинации, приведенные в табл. 15.1, используются следующим образом.
Комбинации типов 2—1, 3—1, 4—1, 5—1 и 6—1 используются для вызова РИП. Каждая из комбинаций присваивается двум РИП, одному — с одной стороны связи, другому — с другой. Таким образом, пять комбинаций частот обеспечивают вызов десяти РИП. Например, комбинация 2—1 используется Для вызова РИП № 1, комбинация 3—1 —для вызова РИП № 2 и т. д.
Комбинации типов 1—6, 2—6, 3—6, 4—6 и 5—6 используются для вызова ОИП. Например, для вызова ОИП № 1 используется комбинация 1—6, для вызова ОИП № 2 — комбинация 2—6 и т. д. Для вызова ОИП сначала необходимо вызвать соответствующий РИП, а затем через РИП передать команду на соответствующий ОИП. Например, для вызова ОИП № 1, который управляется через РИП № 1, должна быть составлена серия сигналов из следующих комбинаций: 2—1, 1—6. , Комбинация типа 3—2 используется для команды запуска системы телесигнализации.
Комбинация типа 2—3 используется для вызова личного состава РИП к телефону с целью переговора с КП.
Оставшиеся 18 комбинаций используются для передачи команд на технические средства управляемых объектов СНО. Так, комбинацией типа 1—2 может быть передана команда «Включить световой маяк», комбинацией типа 1—3 может быть передана команда «Выключить световой маяк» и т. д.
Таким образом, для передачи команды «Включить световой маяк» на РИП № 2 должна быть составлена серия сигналов из следующих комбинаций: 3—1, 1—2. В этой серии комбинацию 3—1 можно назвать вызывной частью серии (кода), а комбинацию 1—2 — исполнительной часгью. Если необходимо включить световой маяк на РИП № 3, то в этом случае серия комбинаций импульсов будет иметь вид
4—1, 1—2.
Сравнивая две приведенные комбинации импульсов для передачи одной и той же команды на различные РИП, замечаем, что в этих сериях различными являются только вызывные части и одинаковыми исполнительные.
Работа системы телеуправления построена на принципе квитирования прохождения сигналов. При посылке с командного пункта первой частоты посылаемого кода с РИП приходит ответная частота, которая сигнализирует, что первая посылка частоты РИП принята, только после этого с КП посылается вторая частота кода. При принятии РИП второй кодовой посылки с РИП вновь посылается частота квитирования, после прихода которой на КП разрешается следующая операция.
Система телесигнализации ТС предназначена для дистанционного контроля за состоянием технических средств управляемых объектов. Система построена по принципу распределительной селекции и работает по вызову. Это означает, что:
—для получения информации о состоянии технических средств (светового маяка, радиомаяка, наутофона и др.) данного объекта, например РИП, он вызывается по системе телеуправления, т. е. должна быть организована линия связи КП—РИП;
—устройства системы телесигнализации на РИП и КП — шаговые искатели поочередно подключают к линии связи на РИП датчики, выдающие информацию о состоянии проверяемых технических средств, а на КП — индикаторы.
Информация по системе ТС выдается в виде сигналов «Да» или «Нет», которые означают, что проверяемое техническое средство, например, световой маяк, работает или не работает.
Система общеаварийной сигнализации ОА служит для оперативного наблюдения за работающими объектами СНО и автоматически оповещает о выключении любого из них. Это устройство, названное системой общеаварийной сигнализации, состоит из датчиков аварийных сигналов, устанавливаемых на РИП, и приемников этих сигналов, устанавливаемых на КП.
Работа системы заключается в следующем. С каждого РИП на КП непрерывно поступает частота аварийного сигнала. При изменении на контролируемом объекте СНО положения любого датчика сигналов с «Включено» на «Выключено» передача в линию этой частоты прекращается на 5—6 с, и на табло индикации КП появляется световая и звуковая сигнализация о том, что на данном РИП или на одном из подключенных к нему ОИП выключилось какое-то навигационное средство. Такой же сигнал поступит на КП в случае нарушения линии связи (потери несущей частоты), так как прекратится подача частоты аварийного сигнала с того РИП, на котором неисправен приемопередатчик. Характер аварии определяется включением телесигнализации на тот РИП, с которого поступил сигнал аварии.
Система телеконтроля ТК дает возможность в любое время проверить рабочую характеристику, присвоенную телеуправляемому СНО. Команды контроля характеристики совмещены с командами телеуправления на включение СНО. Предусмотрен контроль четырех характеристик СНО на РИП и одной
характеристики на ОИП.
На КП характеристика прослушивается по телефону. На исполнительном пункте устанавливается генератор низкой частоты, выход которого заведен на микрофонную цепь телефонной связи. Включение и выключение генератора производится синхронно с работой любого реле, задающего характеристику работы СНО.
Чтобы не вводить специальной команды на выключение контроля характеристики, на всех РИП и ОИП установлены реле времени для автоматического отбоя контроля характеристики.
Радиостанция системы
Радиостанция системы СТУМ-62, приемопередающая ультракоротковолновая с частотной модуляцией, обеспечивает беспоисковое и бесподстроечное вхождение в связь с аналогичной станцией, настроенной на соответствующую частоту.
По настройке приемопередатчиков радиостанции выполняются в двух вариантах:
вариант НВ (прием на более низкой частоте, чем передача);
вариант ВН (прием на более высокой частоте, чем передача).
Мощность на выходе передатчика при нагрузке на активное сопротивление 75 Ом не менее 2 Вт. Стабильность частоты не хуже 8-10-5. Чувствительность радиоприемника при соотношении сигнал/шум на выходе фильтра низкой частоты 30 дБ не хуже 10 мкВ.
Радиостанция имеет фиксированную настройку приемника и передатчика. Для работы радиостанций предназначены 20 частот в диапазоне УКВ: 10 верхних и 10 нижних. Разнос между соответствующими частотами верхней и нижней групп составляет 8 мГц. Разнос между соседними частотами одной группы составляет 100 кГц. Из указанных частот образуется 10 частотных каналов (табл. 15.2).
Таблица 15.2
Номер |
Частоты |
Частоты |
|||
радиостанций НВ |
радиостанций ВН |
||||
канала |
|||||
Прием |
Передача |
Прием |
Передача |
||
|
|||||
|
|
|
11 |
|
|
1 |
1 |
11 |
1 |
||
2 |
2 |
12 |
12 |
2 |
|
3 |
3 |
13 |
13 |
3 |
|
4 |
4 |
14 |
14 |
4 |
|
5 |
5 |
15 |
15 |
5 |
|
6 |
6 |
16 |
16 |
6 |
|
7 |
7 |
17 |
17 |
7 |
|
8 |
8 |
18 |
18 |
8 |
|
9 |
9 |
19 |
19 |
9 |
|
10 |
10 |
20 |
20 |
10 |
|
За каждой радиостанцией закрепляются две частоты: одна более высокая, чем другая, например 1 и 11, 2 и 12 и т. д. Одна из частот присваивается приемнику, другая — передатчику. В зависимости от номера низкой частоты радиостанции присваиваются номер канала и индекс НВ — прием на более низкой частоте, чем передача, или ВН — прием на более высокой частоте, чем передача. Например, индекс радиостанции 4ВН означает, что приемник работает на 14-й частоте, а передатчик — на 4-й. Радиостанции, работающие в паре, должны быть одного канала и разных индексов.
Для обеспечения работы системы СТУМ-62 при полном объеме управляемых объектов СНО (10 РИП и 50 ОИП) требуется выделить 10 пар частот (10 каналов).
В случае выделения для работы СТУМ-62 меньшего количества частотных каналов число управляемых объектов соответственно уменьшается.
Радиостанция предназначена как для обеспечения двухсторонней (дуплексной) прямой радиосвязи между двумя объектами, так и для работы в режиме радиорелейной линии. В целях экономии электропитания в радиостанции предусмотрен режим работы—-дежурный прием. В этом режиме все устройства передатчика полностью выключаются и работает только один приемник. При получении вызова от корреспондента или при необходимости послать вызов корреспонденту включается передатчик.
Для обеспечения возможности работы в режиме «дежурного приема» станций, работающих на необслуживаемых пунктах, в состав радиостанции введен блок автоматики, обеспечивающий включение
передатчика от появления несущей частоты.
Включение всей радиорелейной связи производится последовательно, начиная с КП, на котором включается тумблером реле питания передатчика, после включения передатчика на следующем пункте появляется несущая частота, от которой включается его передатчик, и так до конца участка.
Антенные устройства
Антенны аппаратуры СТУМ-62 изготавливаются трех типов с коэффициентами усиления относительно полуволнового вибратора 0, 6 и 8дБ и рассчитаны на одновременный прием и передачу сигналов, имеющих вертикальную и горизонтальную поляризацию поля.
Приемная и передающая антенны расположены взаимно перпендикулярно и электрически развя-
заны.
Антенна с коэффициентом усиления 0 дБ выполнена в виде одноэлементной антенны и состоит из симметричного вертикального шунтового вибратора и симметричного горизонтального петлевого виб-
ратора. Оба вибратора имеют длину около λ2 и монтируются на общей стреле. Петлевой вибратор удо-
бен в конструктивном отношении и обладает пониженным волновым сопротивлением, что улучшает его согласование в полосе частот.
Антенны с коэффициентом усиления 6 и 8 дБ выполнены по схеме «волновой канал» и имеют соответственно три и пять элементов.
Антенны типа «волновой канал» состоят из параллельных вибраторов (длина каждого около λ2 ),
расположенных в одной плоскости вдоль линии максимального излучения (или приема). Один вибратор, к которому подключается питающий фидер — активный, остальные, электрически не соединенные с фидером, — пассивные. Вибратор, расположенный позади активного вибратора, играет роль рефлектора, а расположенные перед активным вибратором — роль директоров. Назначение рефлектора и ди- ректора—усилить излучение в направлении на корреспондента и ослабить излучение в противоположном направлении.
Оптимальные условия работы рефлектора получаются, когда его длина несколько больше λ2 и
расстояние между активными вибратором и рефлектором равно около 0,2λ. Длина директора берется несколько меньше, а расстояние между директорами и между активным вибратором и первым директором равно около 0,15λ.