

Б) Для настройки контура натяжения на симметричный оптимум используем пи-регулятор, который имеет передаточную функцию.
![]() ;
;
При таких соотношениях постоянных контура натяжения расчет параметров ПИ-регулятора скорости можно осуществить по формулам:
![]()
![]() ;
;
![]()
![]()
 Рис.33 Упрощенная
структурная схема контура натяжения.
Рис.33 Упрощенная
структурная схема контура натяжения.
При подаче задающего импульса получаем переходной процесс, соответствующий настройке на симметричный оптимум (4.3 % перерегулирования).
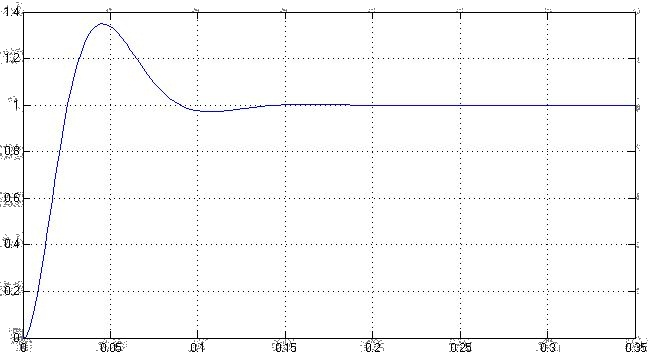
Рис.34 Переходная характеристика контура скорости.
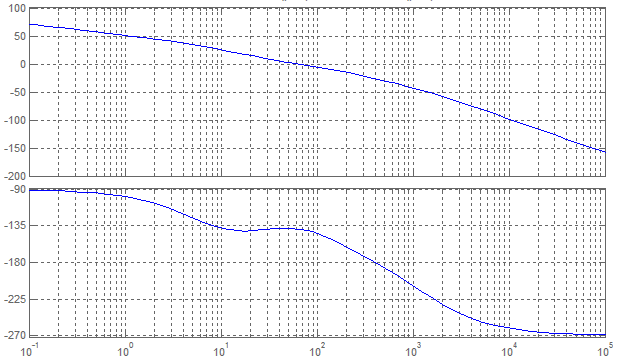
Рис.35-ЛАФЧХ контура скорости
а) Амплитудно-частотная характеристика.
б) Фазо-частотная характеристика
Из рисунков видно, что перерегулирование переходного процесса контура тока составляет 35%, запас устойчивости контура тока составляет 36 градусов. Следовательно, контур тока настроен на симметричный оптимум.
Чтобы смоделировать реальную систему поддержания натяжения развернем внутренние контуры скорости и тока в упрощенном контуре натяжения. При этом переменные параметры оставим статическими.


Рис.36 Структурная схема развёрнутого контура натяжения со статическими параметрами.

Рис.37 График силы натяжения со статическими параметрами.
В 1000 с. подаем возмущающее воздействие 1000 Нм (50% от момента натяжения). Как видно из рисунка, система отработала возмущение без видимых отклонений.


Рис.38 Переходный процесс в обратной связи контура натяжения.
Смоделируем ту же систему, но с динамическими параметрами.


Рис.39 Структурная схема развёрнутого контура натяжения с динамическими параметрами.


Рис.37 График силы натяжения с динамическими параметрами контура при подаче возмущающего воздействия по моменту.
Как видно из рисунка, система хорошо отработала возмущающие воздействия по натяжению и с динамическими параметрами.
6.6 Выбор датчика натяжения.
Выбираем датчик натяжения фирмы Montalvo, серии U-75,модель 12500.
-
Наименование параметра
Значение параметра
Напряжение питания,В
5
Номинальный выходной сигнал, мВ
50
Время отклика, мкс
1
Нагрузка, Н
0-12500
7. Заключение.
Данная работа заключалась в проектировании электропривода постоянного тока раската ПРС и синтез его системы автоматического регулирования. Во время работы были закреплены полученные ранее знания и приобретены навыки расчета и разработки автоматизированных электроприводов для промышленных установок на примере продольно-резательного станка. Была разработана система электропривода раската: выбраны силовая часть, двигатель, произведён расчёт и синтез системы автоматического регулирования, также была проведена проверка отработки по возмущающим воздействиям.
При проектировании системы автоматического регулирования был использован метод подчиненного регулирования. Отработка системы регулирования осуществлялась прямым методом. Прямой метод регулирования требует более сложные системы наблюдения. Но с современной цифровой техникой, это не представляется проблемой.