

6.2 Расчет параметров структурной схемы контура скорости.
В
контур скорости рассматриваемой системы
входят регулятор скорости, тиристорный
преобразователь, якорная цепь двигателя
и датчик скорости. Максимальное задание,
подаваемое на регулятор, примем равным
![]() .
.

Рис.16 Структурная схема контура скорости.
Wрс(p)-передаточная функция регулятора скорости.
Wрт(p)-передаточная функция регулятора тока.
Wтп(p)-передаточная функция тиристорного преобразователя.
Wяц(p)-передаточная функция якорной цепи двигателя.
Wмех(p)-передаточная функция механической части.
Wдт(p)-передаточная функция датчика тока.
Wдс(p)-передаточная функция датчика скорости.
КЕ и КМ- конструктивные постоянные двигателя.
Uзад – задание напряжение на контур скорости.
ω – скорость механизма.
Для вычисления параметров регулятора скорости нужно преобразовать контур тока.
Приведём
контур тока к виду
![]() ,
получим передаточную функцию упрощённого
контура тока
,
получим передаточную функцию упрощённого
контура тока![]() .
.
Убедимся, что переходная характеристика свёрнутого контура тока имеет незначительные отличия от переходной характеристики реального контура.
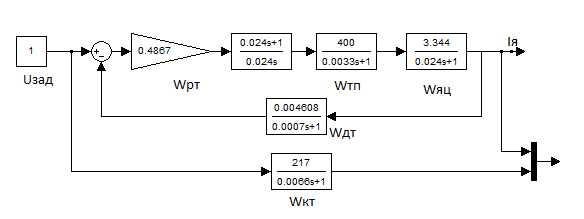
Рис.17 Структурная схема реального и свёрнутого контура тока.

Рис.18 Переходный процесс упрощённого и реального контура тока.
Как видно из рисунка, разницей между реальным и свёрнутым контуром можно пренебречь.
Если
электромеханическая постоянная времени
![]() ,
много больше Тяц, что мы и видим из
расчетов, то без заметного ущерба для
точности расчетов обратной связью по
ЭДС двигателя можно пренебречь.
,
много больше Тяц, что мы и видим из
расчетов, то без заметного ущерба для
точности расчетов обратной связью по
ЭДС двигателя можно пренебречь.
Пренебрегая обратной связью по ЭДС и заменив реальную передаточную функцию замкнутого контура тока упрощенной, получим упрощенную схему контура скорости.
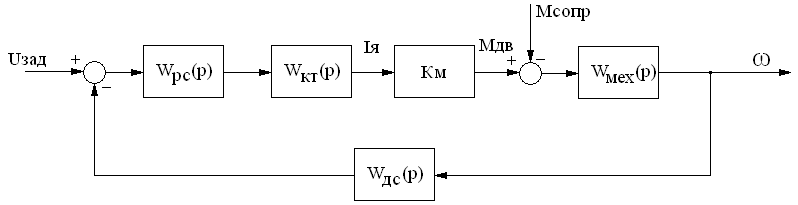 Рис.19 Упрощенная
труктурная схема контура скорости
Рис.19 Упрощенная
труктурная схема контура скорости
Wрс(p)-передаточная функция регулятора скорости.
Wкт(p)-передаточная функция замкнутого контура тока.
Wмех(p)-передаточная функция механической части.
Wдс(p)-передаточная функция датчика скорости.
Км-конструктивная постоянная двигателя.
а) Датчик скорости представляем апериодическим звеном с передаточной функцией:
![]() ;
;
где
![]()
![]() (с).
(с).
Тогда
получаем предполагаемую передаточную
функцию датчика скорости в виде:
![]()
б) В структурной схеме механическую часть электропривода представляем интегрирующим звеном с передаточной функцией:
![]() ;
;
где
![]() =1790
Нм;
=1790
Нм;
Тогда
получаем предполагаемую передаточную
функцию механической части в виде:
![]()
В) Для настройки контура скорости на симметричный оптимум используем пи-регулятор, который имеет передаточную функцию.
![]() ;
;
При
настройке внешнего контура в системе
подчиненного регулирования, регулятором
компенсируем большую постоянную времени,
которой является постоянная времени
Тмех = Jпр
= 1790 (c).
А остальные постоянные времени, если
они хотя бы на порядок меньше для
упрощения настройки принимают как сумму
малых постоянных времени. И звенья,
содержащие данные малые постоянные
времени заменяют одним передаточным
звеном.
![]()
![]()
При таких соотношениях постоянных контура скорости расчет параметров ПИ-регулятора скорости можно осуществить по формулам:
![]()
![]() ;
;
![]()
![]()

Рис.20 Структурная схема упрощённого контура скорости
При подаче задающего импульса получаем переходной процесс, соответствующий настройке на симметричный оптимум (43 % перерегулирования).

Рис.22 Переходная характеристика контура скорости.

Рис.22-ЛАФЧХ контура скорости
а) Амплитудно-частотная характеристика.
б) Фазо-частотная характеристика
Из рисунков видно, что перерегулирование переходного процесса контура тока составляет 46%, запас устойчивости контура тока составляет 36 градусов. Следовательно, контур тока настроен на симметричный оптимум.
Для того, чтобы убедится в том, что настройка контура без учёта обратной связи по ЭДС и со свёрнутым контуром тока не сильно скажется на полном контуре, сравним контура.

Рис.24 Сравнение
полного и упрощённого контуров скорости

Рис.25 Сравнение переходных процессов полного и упрощённого контуров скорости.
Как видно из рисунка, допущения сказались не сильно, соответственно настройка подходит и для полного контура скорости.