

§9 Типовые звенья линейных систем и их динамические характеристики
Типовым элементарным динамическим звеном называется звено, динамика которого описывается диффернциальным уравнением не выше второго порядка.
Типовые звенья классифицируются в зависимости от вида дифференциального уравнения на позиционные, интегрирующие, дифференцирующие, запаздывания.
Позиционными называются звенья в левой части дифференциального уравнения которых выходная величина и её производные, а в правой – входная величина.
§9.1 Позиционные звенья
1)Усилительное звено:
уравнение звена имеет вид у(t)=kx(t) (1)
передаточная функция звена: W(p)=y(p)/x(p)=k;
переходная функция: h(t)=L-1{W(p)/p}=L-1{k/p}=k∙1(t).
Весовая функция представляет собой импульс, площадь которого равна к, т.е. при x(t)=δ(t); y(t)=ω(t)=k∙ δ(t)
Получим частотные характеристики усилительного звена.КЧХ:
W(jω)=k
AЧХ : А(ω)=к ; ФЧХ: φ(ω)=0 на всех частотах.

Рис 9.1 Динамические и частотные характеристики усилительного звена
2) Апериодическое звено I-го порядка
Звено, в котором при скачкообразном изменении входной величины выходная величина апериодически (по экспоненте) стремится к новому установившемуся значению, называется апериодическим (инерционным).
Пример (рис. 9.2):
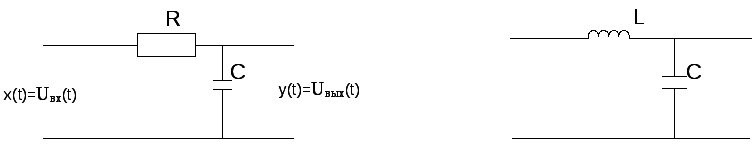
Рис. 9.2. Примеры инерционных звеньев
Дифференциальное уравнение звена имеет вид:
![]() (1)
(1)
где Т – постоянная времени [c],
k – коэффициент передачи.
Операторное уравнение звена:
![]()
Тогда передаточная функция звена:
![]() .
.
Переходная функция звена:
![]()
Весовая функция звена:
![]()
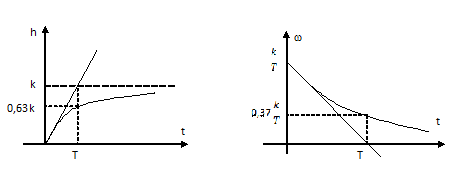
Рис 9.3 Временные характеристики инерционного звена
Постоянная времени Т представляет собой интервал времени, в течение которого выходная величина достигла бы своего нового установившегося значения, если бы она изменялась с постоянной скоростью, равной скорости её изменения в начальный момент времени после поступления на вход единичного входного сигнала.
Чем >Т тем медленнее переходный процесс. Теоретически, переходный процесс в апериодическом звене длится бесконечно долго.
Под временем переходного процесса понимают промежуток времени, по истечении которого входная величина достигнет 0,95 от установившегося значения.
При t=3T
![]() ,
т.е
,
т.е
![]() .
.
При t=T
![]()
Т можно определить как время, за которое входная величина изменяясь от 0 достигла 0,63 от установившегося значения, при подаче на вход звена единичного ступенчатого воздействия.
Для весовой функции при t=T:
![]() .
.
Получим частотные характеристики звена.
КЧХ:
![]()
![]() -
АЧХ
-
АЧХ
![]() -
ФЧХ
-
ФЧХ
В §.8. определяли ВЧХ и МЧХ:
![]() ;
;
![]()
Построим асимптотическую ЛАХ звена:
![]() (2)
(2)
Для построения уравнения асимптот рассмотрим следующие интервалы частот:
При малых частотах
ωT<<1
или ω<<(1/Т) ,1/Т – частота сопряжения.
Пренебрегаем величиной
![]() в (2), тогда уравнение первой асимптоты
имеет вид:
в (2), тогда уравнение первой асимптоты
имеет вид:
![]() (0
дб/дек)
(0
дб/дек)
При частотах ω>>(1/Т) пренебрегаем 1 в (2), тогда получим уравнение второй асимптоты:
![]() (-20
дб/дек)
(-20
дб/дек)

Рис. 9.5. Асимптотическая ЛАХ звена
Если
построить действительную ЛАХ по уравнению
(2), то наибольшая погрешность будет на
частоте
![]() .
Определим ΔL(ω):
.
Определим ΔL(ω):
![]() дБ.
дБ.
Апериодическое звено 2-го порядка
Дифференциальное уравнение звена имеет вид:
![]()
Операторное уравнение:
![]()
Разложим левую часть на множители:
![]() ,
где
,
где
![]() и Т4>Т3
и Т4>Т3
Тогда передаточная функция звена:
![]()
![]() (1)
(1)
Очевидно, что Т3, Т4 могут быть как вещественными, так и комплексными.
При
![]() ;
;![]() ,корни будут
вещественными, звено апериодическим
2-го порядка.
,корни будут
вещественными, звено апериодическим
2-го порядка.
При
![]() <0;
Т1<2Т2,
корни будут
комплексными, звено колебательным.
<0;
Т1<2Т2,
корни будут
комплексными, звено колебательным.
При Т1=0 корни будут мнимыми, звено консервативным.
Из выражения (1) следует, что апериодическое звено 2-го порядка эквивалентно двум апериодическим звеньям 1-го порядка, соединённым последовательно.
Переходная функция звена:



Рис. 9.6. Временные характеристики апериодического звена 2-го порядка
Получим частотные характеристики:
![]()
![]()
Построим асимптотическую ЛАХ звена:
![]() ,
Т4>Т3
,
Т4>Т3
При ω<(1/Т4)<(1/Т3)
![]() (0
дБ/дек);
(0
дБ/дек);
При (1/Т4)<ω<(1/Т3)
![]() (-20
дБ/дек);
(-20
дБ/дек);
При ω>(1/Т3)>(1/Т4)
![]() (-40
дБ/дек).
(-40
дБ/дек).
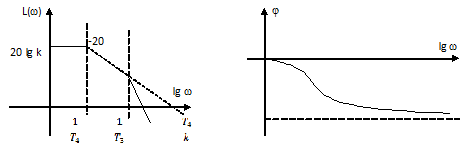
Рис. 9.7. Асимптотическая ЛАХ звена
Колебательное звено
Дифференциальное уравнение звена такое же как и у апериодического 2-го порядка:
![]() .
.

Рис. 9.8. Примеры колебательных звеньев:
а) R,L,C – колебательный контур;б) механическая система ( m – масса;с – коэффициент упругости пружины;λ – коэффициент демфирования).
Характеристическое уравнение звена:
![]() при
при
![]() <0
или Т1<2Т2.
В этом случае отношение
<0
или Т1<2Т2.
В этом случае отношение
![]() называютпостоянной
затухания ( коэффициент демпфирования)
колебательного звена.
называютпостоянной
затухания ( коэффициент демпфирования)
колебательного звена.
При
![]() - колебательное звено; λ≥1 – апериодическое
2-го порядка; при λ=0 – консервативное.
- колебательное звено; λ≥1 – апериодическое
2-го порядка; при λ=0 – консервативное.
Корни характеристического уравнения:

где
![]() -коэффициент
затухания;
-коэффициент
затухания;
![]() ;
;
ω – частота собственных колебаний звена;
ωс=1/Т2 – угловая частота свободных колебаний при отсутствии затухания (λ=0).
Переходная функция колебательного звена:
![]() (2)
(2)
Весовая функция:
![]() (3)
(3)
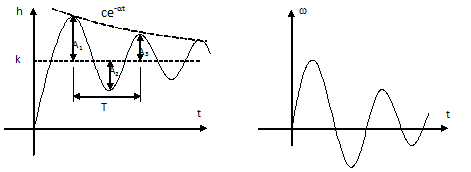
Рис. 9.9 Временные характеристики колебательного звена.
Уравнения
(2), (3) характеризуют затухание во времени
синусоидальных колебаний выходной
величины с частотой
![]() .Затухание
этих колебаний определяется величинойкоэффициента
затухания α..
.Затухание
этих колебаний определяется величинойкоэффициента
затухания α..
Из рисунка 9.9 следует, что чем меньше α, тем больше колебательность переходного процесса.
![]()
Колебательность можно оценивать по степени затухания Ψ, равной отношению разности двух соседних положительных амплитуд к большей из них (рис. 9.9):
![]() ,
,
Из
рисунка 9.9 =>
![]() =>
=>
![]() (4)
(4)
Чем ближе к единице Ψ, тем быстрее затухают колебания переходного процесса.
Получим частотные характеристики звена:
КЧХ:

![]()

При
![]() ;
;![]()
![]()

Рис. 9.10 Частотные характеристики звена АЧХ, ФЧХ
Построим
асимптотическую ЛАХ звена.
![]() -
сопрягающая частота.
-
сопрягающая частота.
![]()
1)
При
![]() (при ω→0) :
(при ω→0) :
![]() (0
дБ/дек);
(0
дБ/дек);
2)
При
![]() (при ω→∞):
(при ω→∞):
![]() (-40
дБ/дек).
(-40
дБ/дек).

Рис. 9.11 Асимптотическая ЛАХ колебательного звена.