

§ 10.2 Одноемкостный объект без самовыравнивания.
Примером
такого объекта может служить бассейн,
из которого вода отбирается не самотеком,
а откачивается насосом постоянной
производительностью
 .
.
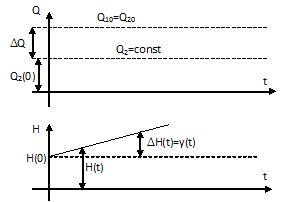
Рисунок 10.2 Одноёмкостный объект без самовыравнивания
В установившемся режиме:
![]()
Нанесем
объекту возмущение, уменьшив
производительность насоса на величину
![]() ,
т.е.
,
т.е.![]()
В
результате разности
![]() уровень воды в бассейне начнет возрастать.
Т.к. производительность насоса не зависит
от давления воды, то расход воды остается
прежним:
уровень воды в бассейне начнет возрастать.
Т.к. производительность насоса не зависит
от давления воды, то расход воды остается
прежним:![]()
В переходном режиме:
![]()
или
![]()
Очевидно,
что у таких объектов
![]() .
Введя в рассмотрение те же величины,
что и в предыдущем пункте, получим
дифференциальное уравнение динамики
объекта:
.
Введя в рассмотрение те же величины,
что и в предыдущем пункте, получим
дифференциальное уравнение динамики
объекта:
![]() или
или
![]() (1)
(1)
Величина
![]() называется скоростью разгона и
характеризуется скоростью изменения
выходной величины при единичном входном
воздействии. Для объекта без самовыравнивания
скорость изменения регулируемой величины
постоянна (рис. 2в).
называется скоростью разгона и
характеризуется скоростью изменения
выходной величины при единичном входном
воздействии. Для объекта без самовыравнивания
скорость изменения регулируемой величины
постоянна (рис. 2в).
Временем
разгона здесь будет время заполнения
(до заданного значения уровня H(0))
пустого в начале бассейна, если расход
 ,
а приток мгновенно изменится от 0 до
,
а приток мгновенно изменится от 0 до .
.
Очевидно, что уравнение динамики объекта соответствует уравнению идеального интегрирующего звена, поэтому его свойства будут присущи и рассматриваемому объекту.
Объекты, описываемые уравнением (1) называются одноемкостными объектами без самовыравнивания. Так как в переходном режиме все время сохраняется разница между притоком и расходом воды, то при любых возмущающих воздействиях регулируемая величина будет беспредельно (на практике до аварийного состояния) изменяться, а не стремиться к новому установившемуся значению. В связи с этим такие объекты не могут работать без принудительного регулирования.
Скорость изменения регулируемой величины в рассмотренном примере зависит от величины возмущающего воздействия и от площади поперечного сечения бассейна S. В данном случае S характеризует емкость объекта – его способность накапливать воду.
Передаточная функция объекта:
![]() .
.
§10.3 Многоемкостные объекты с самовыравниванием
Эти объекты, также как и одноемкостные, обладают способностью самостоятельно приходить в новое состояние равновесия после нанесения им возмущения, однако переходные процессы в них отличаются от процессов в одноемкостных объектах.
Рассмотрим в качестве примера объект, состоящий из двух бассейнов, соединенных трубопроводом (рисунок 10.3).

Рисунок 10.3.1 Многоёмкостный объект с самовыравниванием
Регулируемая
величина – уровень воды во втором
бассейне
![]() ,
а входная – изменение притока воды в
1-й бассейн
,
а входная – изменение притока воды в
1-й бассейн .
Увеличим приток жидкости на входе, тогда
начнет расти уровень воды в 1-м и во 2-м
бассейнах.
.
Увеличим приток жидкости на входе, тогда
начнет расти уровень воды в 1-м и во 2-м
бассейнах.
Однако
изменение
![]() будет запаздывать относительно изменения
будет запаздывать относительно изменения![]() ,
т.к. при этом потребуется время на
перетекание жидкости из 1-го бассейна
во 2-й.
,
т.к. при этом потребуется время на
перетекание жидкости из 1-го бассейна
во 2-й.
Такое запаздывание называется емкостным и зависит от сопротивления соединительного трубопровода.
Рассматриваемый объект можно рассматривать в виде последовательного соединения двух апериодических звеньев 1-го порядка.
![]() .
.
Таким
образом, рассматриваемый объект подобен
апериодическому звену 2-го порядка.
После нанесения возмущения изменение
регулируемой величины начинается с
возрастающей, а затем с убывающей
скоростью. Кривая
![]() имеет
точку перегиба, в которой скорость
изменения регулируемой величины
монотонна, с течением времени регулируемая
величина стремится к установившемуся
значению.
имеет
точку перегиба, в которой скорость
изменения регулируемой величины
монотонна, с течением времени регулируемая
величина стремится к установившемуся
значению.