

§11.2 Интегральный регулятор
Регулятор, реализующий И-закон регулирования называется интегральным (И-регулятор). У И-регулятора изменение выходной величины (перемещение регулирующего органа) пропорционально интегралу от отклонения регулируемой величины. Уравнение динамики И-регулятора имеет вид:
u(t)=![]() или
или
![]() ,
,
где
![]() -
постоянная времени интегрирования,
являющаяся настроечным параметром
И-регулятора.
-
постоянная времени интегрирования,
являющаяся настроечным параметром
И-регулятора.
Из
уравнения динамики следует, что скорость
перемещения регулирующего органа
пропорциональна величине рассогласования
ε(t).
Регулирующий орган будет перемещаться
до тех пор, пока рассогласование (ошибка
регулирования) не станет равным нулю:
![]() (илиu=const)
при ε(t)=0.
(илиu=const)
при ε(t)=0.
Для
И-регулятора характерно то, что при
постоянно действующем возмущении он
возвращает регулируемую величину к
заданному значению, а следовательно
устраняет ошибку системы:
![]() =0.
=0.
В
динамическом отношении И-регулятор
представляет собой идеальное интегрирующее
звено с передаточной функцией
![]()
Рассмотрим реализацию И-закона на примере одноёмкостного объекта с самовыравниванием (рисунок 11.3).
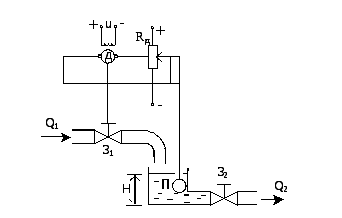

Рисунок 11.3 Пример реализации И-закона
В
случае равенства
![]() уровень Н = Н(0), а поплавок П и задвижка
З1 неподвижны. Движок потенциометрического
датчика
уровень Н = Н(0), а поплавок П и задвижка
З1 неподвижны. Движок потенциометрического
датчика![]() находится посередине, напряжение
питания якоря равно нулю. При уменьшении
расхода жидкости на величину
находится посередине, напряжение
питания якоря равно нулю. При уменьшении
расхода жидкости на величину![]() уровень жидкости в баке начнет расти,
поплавок поднимется и перемещает вверх
движок датчика. В цепи якоря ДПТ появляется
напряжениеU.
Двигатель несколько закрывает задвижку
З1 и приток жидкости Q1
уменьшается. В момент t1
величины Q1
и Q2
сравнялись (рисунок 11.3 б). Но так как
уровень воды превышает заданный H(0),
т.е.
уровень жидкости в баке начнет расти,
поплавок поднимется и перемещает вверх
движок датчика. В цепи якоря ДПТ появляется
напряжениеU.
Двигатель несколько закрывает задвижку
З1 и приток жидкости Q1
уменьшается. В момент t1
величины Q1
и Q2
сравнялись (рисунок 11.3 б). Но так как
уровень воды превышает заданный H(0),
т.е.
![]() ,
интеграл от рассогласования будет
возрастать и следовательно регулирующее
воздействиеu(t)
будет продолжать изменяться. В результате
приток Q1
дополнительно уменьшится и станет
меньше расхода Q2,
поэтому уровень в баке начнет уменьшаться,
что в свою очередь вызовет уменьшение
расхода вытекающей жидкости Q2(t).
В момент
,
интеграл от рассогласования будет
возрастать и следовательно регулирующее
воздействиеu(t)
будет продолжать изменяться. В результате
приток Q1
дополнительно уменьшится и станет
меньше расхода Q2,
поэтому уровень в баке начнет уменьшаться,
что в свою очередь вызовет уменьшение
расхода вытекающей жидкости Q2(t).
В момент
![]() приток
и расход жидкости сравняются и уровень
достигнет заданного значенияH(0)
(рисунок 11.3 в).
приток
и расход жидкости сравняются и уровень
достигнет заданного значенияH(0)
(рисунок 11.3 в).
Процесс регулирования при И-законе прекратится, если одновременно будут выполнены 2 условия:
- уровень равен заданному H=H(0);
-приток жидкости равен расходу Q1=Q2.
Первое
условие необходимо для того, чтобы
регулирующее воздействие перестало
изменяться. При выполнении второго
условия в объекте достигается равновесие
и уровень H
постоянен. Эти условия выполняются,
начиная с времени
![]() ,
которое определяет время регулирования.
,
которое определяет время регулирования.
Сравнительный анализ П и И регуляторов
И-регулятор
при постоянно действующем возмущении
возвращает регулируемую величину к
заданному значению, то есть устраняется
ошибка регулирования
![]() =0.(преимущество
И-закона).
=0.(преимущество
И-закона).
Однако при П-законе САР в переходном режиме будет иметь лучшие показатели качества, чем при И-законе регулирования (преимущество П-закона).

Рисунок 11.4 – Сравнение переходных характеристик П- и И-регуляторов.
В начальный момент времени П-регулятор сразу создает мощное регулирующее воздействие на объект. При И-законе, в начальный момент времени оно мало. Только спустя некоторое время воздействие И-регулятора достигает того же значения, что и при П-законе (рисунок 11.4).
Медленная реакция И-регулятора в начальный момент не позволяет достаточно эффективно компенсировать влияние возмущения на объект, поэтому в объекте при И- законе возникают более значительные динамические отклонения регулируемой величины, а сам процесс регулирования длится дольше.
Таким образом, П-регулирование обеспечивает хорошее свойство САР в переходном процессе, а И-регулирование позволяет полностью устранить ошибку регулирования.