

Часть 2. Исследование устойчивости и качества переходных процессов системы управления при гибкой отрицательной обратной связи в matlab
Функция fmin(funx1 x2) это функция определяет значение аргументы значения хMin функции fun из диапазона
x1<=x<=x2
x=0:0.1:6 ;
y=2.^x-4*x+6;
plot(x,y)
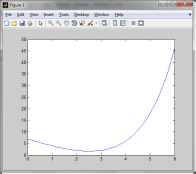
Рис. 5Функция 2.^x-4*x+6
x=0:0.1:6 ;
y=2.^x-4*x+6;
plot(x,y)
x=fminbnd('2.^x-4*x+6',2,4)
y=2.^x-4*x+6
min x = 2.5288
min y = 1.6557
Интегральные преобразования
Интегральные преобразования находят широкое применение при решении дифф уравнений, вычислений предельных значений функций f(X) , исследований динамики систем управления, систем массового обслуживания и во многих других технических и научных задач. Наиболее популярными является преобразование Лапласа ,Капсона и Z-преобразования.
Преобразование Лапласа.
Преобразование Лапласа в функции f(x) имеет вид:
 (1)
(1)
Где f(x) функция преобразования Лапласа которую необходимо найти, если аргументом функции является время t то преобразование Лапласа имеет вид:
 (2)
(2)
С помощью преобразования Лапласа можно существенно упростить решение задач связанных с определением пределов функции. Для этого служат следующие предельные теоремы:
 (3)
(3)
В системе MatLab преобразование Лапласа функции f(t) осуществляется с помощью следующих встроенных функций: laplace(F), laplace(F,S), laplace(F, ω,s).
Функция laplace(F).
Функция laplace(F) – преобразование Лапласа символьной переменной F. Если функция F является аргументом t то преобразование Лапласа осуществляется по формуле (2). Если же в F аргумент tотсутствует то преобразование Лапласа осуществляется по переменной в соответствии с алфавитом переменных функции F .
syms a;
laplace(a)
ans =1/s^2
Если необходимо найти преобразование Лапласа переменной n, представляющей собой число например n=2 то функция laplace(F)значений не дает. Это объясняется тем что в данном случае в выражении F отсутствует переменная интегрирования.
syms a b c d t w;
laplace(a+b*c)
laplace(a+d*c)
laplace(a+d*w)
laplace(a+w*t)
ans = a/s + b/s^2
ans = a/s + c/s^2
ans = a/s + d/s^2
ans = a/s + w/s^2
Функция laplace(F,s)
laplace(F,s) – преобразование Лапласа по формуле (2)
syms s;
laplace(3.5,s)
ans =7/(2*s)
laplace(F,s) – преобразование Лапласа по переменной ω .
Функция обеспечивает преобразование функции по формуле:
 (4)
(4)
syms a b c x s t;
laplace(a,t,s)
laplace(t*exp(-a*t),t,s)
laplace(a+b*c,b,s)
ans =a/s
ans =1/(a + s)^2
ans =a/s + c/s^2
Решение дифференциальных уравнений с помощью преобразования Лапласа.
Пусть имеется многоканальная система массового обслуживания с отказами. Интенсивность потока заявок на обслуживание λ , интенсивность обслуживания заявки μ , число обслуживающих каналов N=2.

Найдем теперь финальные вероятности состояний, воспользовавшись предельными теоремами (3). На основании имеем итоговую формулу:
То
есть, если интенсивность потока заявок
равно интенсивности обслуживания
 ,
то Рс=4/5=0,8 .
,
то Рс=4/5=0,8 .
Исследование переходных процессов в системах управления
Обратное преобразование Лапласа
Для получения решения системы дефиринциальных уравнений во временной области необходимо полученной решение в преобразованиях Лапласа представить в виде функции t.
 (5)
(5)
Существуют таблицы обратных преобразований различных функций однако при наличии универсальных программных средств символьной математики обращаться к ним нет необходимости:
iLaplace (L(s), t),
где L(s)- прямое преобразование Лапласа,
t- аргумент искомой функции f(t)
syms a b s t l;
l = (a+b*s)/ s^2;
ilaplace(l,t)
ответ: ans = b + a*t
syms s t P;
P = (s^2+5*s+4)/(s*(s^2+5*s+5))
ilaplace(P,t)
ответ: P = (s^2 + 5*s + 4)/(s*(s^2 + 5*s + 5))
ans = (cosh((5^(1/2)*t)/2) + 5^(1/2)*sinh((5^(1/2)*t)/2))/(5*exp((5*t)/2)) + 4/5
Задачи управления
При анализе систем управления задача формулируется следующим образом:
Дано: 1. Структурная схема системы(блок-схема)
2. передаточные функции звеньев системы
3. Значение переменных передаточных звеньев
Необходимо определить: 1. устойчивость системы управления
2. качество переходных процессов
3. точность системы
При синтезе системы управления задача формулируется иначе:
Необходимо создать из имеющихся звеньев структурную схему которая удовлетворяла условиям устойчивости (запас по фазе и амплитуде). Качество переходных процессов, форма переходного процесса, длительность , величина перерегулирования. Характерными особенностями исследований с помощью Matlab являются:
Простота
Высокая наглядность
Возможность получения характеристик системы практически любой сложности.
Matlab позволяет: 1. исследовать устойчивость системы управления
2. Получать переходные и частотные характеристики системы
3. Исследовать качество переходных процессов
4. Выбрать параметры звеньев. Вид , и характеристики обратной связи с целью обеспечения требуемых динамических свойств системы.
Функции Matlab для создания передаточных функций звеньев системы
Функция tf()
tf(n,m) где n- вектор коэффициента знаменателя
m – вектор коэффициента передаточной функции
функция tf() служит для функций и звеньев в целом.
Необходимо
передать функцию

n = [2 5]
m= [1 0 2 1]
q=tf(n,m)
ответ: Transfer function:
2 s + 5
----------------
s^3 + 2 s + 1
Функции pole() и zero()
Предназначены для определения соответственных полюсов и нулей передаточной функции.
Они имеют вид:
pole(qs)
zero(qs)
где qs – имя передаточной функции заданной оператором tf()
Нулями передаточной функции называются корни числителя а полюсами корни знаменателя.
n = [2 5]
m= [1 0 2 1]
q=tf(n,m)
p= pole(q)
z= zero(q)
ответ: p = 0.2267 + 1.4677i
0.2267 - 1.4677i
-0.4534
z =-2.5000
Функции roots(p) и poly(r)
Функции перднозначены соответственно для вычисления корней полинома и его восстановления по значениям корней.
Эти функции имеют вид:
roots(p)
poly(r)
p – вектор коэффициентов полинома
r – вектор корней полинома

p= [1 3 0 4]
r= roots(p)
p= poly(r)
Ответ: r = -3.3553
0.1777 + 1.0773i
0.1777 - 1.0773i
p = 1.0000 3.0000 -0.0000 4.0000
Функцияconv()
Conv(P,q),
где P,q – векторы коэффициентов полиномов P(s) и q(s)

p=[3 2 1]
q= [1 4]
g=conv(p,q)
Ответ: g = 3 14 9 4
Функцияpolyval()
polyval(n,k) где n- векторполинома
k- значение переменной s

p=[3 2 1]
z=polyval(p,-2)
Ответ: z = 9
Операции с передаточными функциями звеньев
Сложение передаточных функций
n1=[10]
m1=[1 2 5]
n2=[2 12 15]
m2=[1 3 7 5]
z1=tf(n1,m1)
z2=tf(n2,m2)
G=z1+z2
Ответ: Transfer function:
10
----------------
s^2 + 2 s + 5
Transfer function:
2 s^2 + 12 s + 15
---------------------
s^3 + 3 s^2 + 7 s + 5
Transfer function:
2 s^4 + 26 s^3 + 79 s^2 + 160 s + 125
-----------------------------------------
s^5 + 5 s^4 + 18 s^3 + 34 s^2 + 45 s + 25