Продолжительность включения (пв). Пересчет мощности двигателя на стандартную пв. Проверка двигателя на нагрев и перегрузочную способность.
Относительная продолжительность включения (ПВ) – отношение времени работы к времени цикла, взятое в процентах:
![]() ,
,
где: ![]() – продолжительность работы, с;
– продолжительность работы, с;
![]() – продолжительность паузы, с.
– продолжительность паузы, с.
Для двигателей с самовентиляцией, у
которых эффективность охлаждения
зависит от частоты вращения, при
определении расчетного значения
продолжительности включения ПВ необходимо
учитывать ухудшение охлаждения при
пуске и во время паузы
![]() (остановки) введением коэффициентов
(остановки) введением коэффициентов![]() и
и![]() при расчете продолжительности цикла:
при расчете продолжительности цикла:
![]() .
.
При пуске, торможении и
остановке для асинхронных двигателей
![]() ;
;![]() ;
Для двигателей постоянного тока
;
Для двигателей постоянного тока![]() ;
;![]() .
.
Если ![]() и
и![]() не выделены на нагрузочной диаграмме,
продолжительность цикла определяют по
формуле:
не выделены на нагрузочной диаграмме,
продолжительность цикла определяют по
формуле:
![]() ,
где
,
где![]() .
.
Действующим стандартом предусмотрены номинальные повторно-кратковременные режимы с ПВ 15, 25, 40 и 60 % (для продолжительного режима ПВ=100%). В условном обозначении величину ПВ указывают как S3-40%.
При
необходимости выбора мощности двигателя
для других значений
![]() ,
например относительно ПВ=100%, следует
воспользоваться формулой:
,
например относительно ПВ=100%, следует
воспользоваться формулой:
![]() .
.
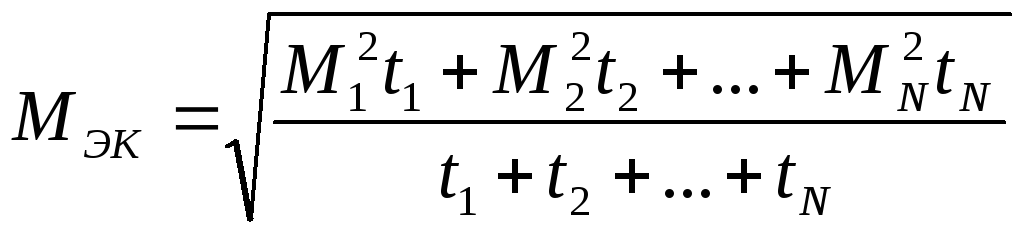
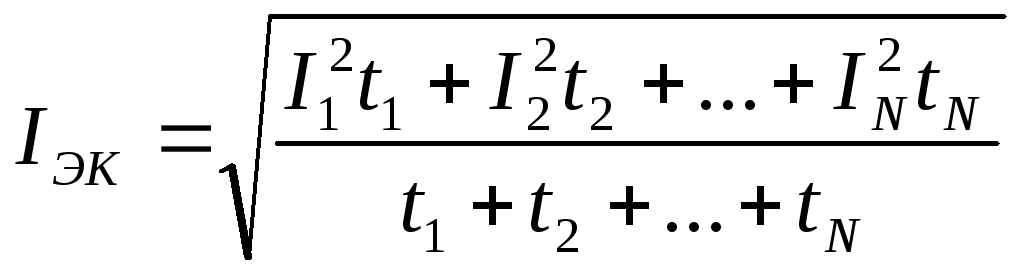
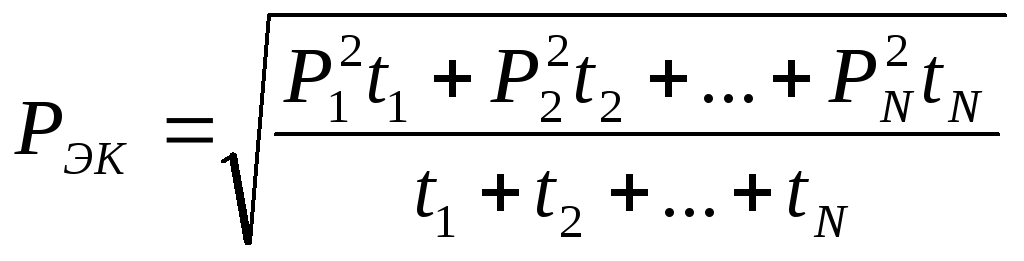
При проверке по нагреву вычисляется
эквивалентные величины: момент, ток или
мощность и сравниваются с номинальными
величинами выбранного двигателя. Причем
считается, что двигатель проходит по
нагреву, если:
![]() ,
,![]() ,
,![]() .
.
Где:
 ;
;
 ;
;
 .
.
При проверке на перегрузочную способность значение максимального момента на валу двигателя за время цикла работы сравнивается со значением номинального момента двигателя, причем:
![]() ,
,
где:
![]() – перегрузочная способность двигателя
(указывается в справочнике).
– перегрузочная способность двигателя
(указывается в справочнике).
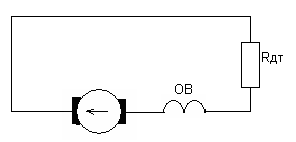
Механические характеристики двигателей постоянного тока последовательного возбуждения.
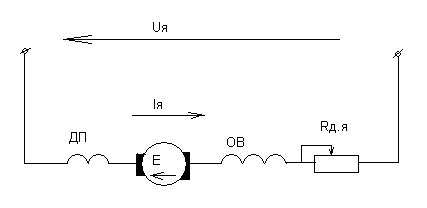
Рисунок 1 – Схема включения двигателя постоянного тока последовательного возбуждения.
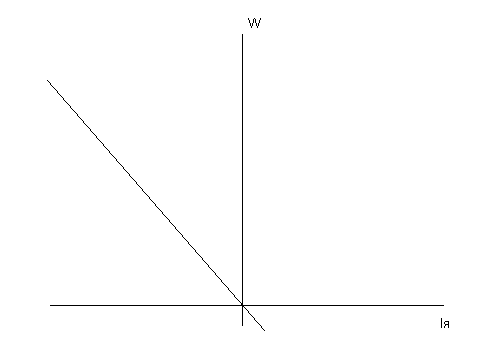
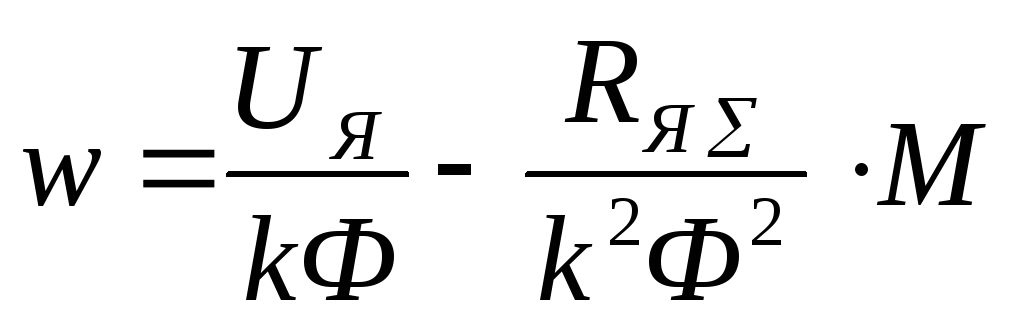
Для двигателя последовательного возбуждения уравнение механической характеристики имеет вид:
И электромеханическая:
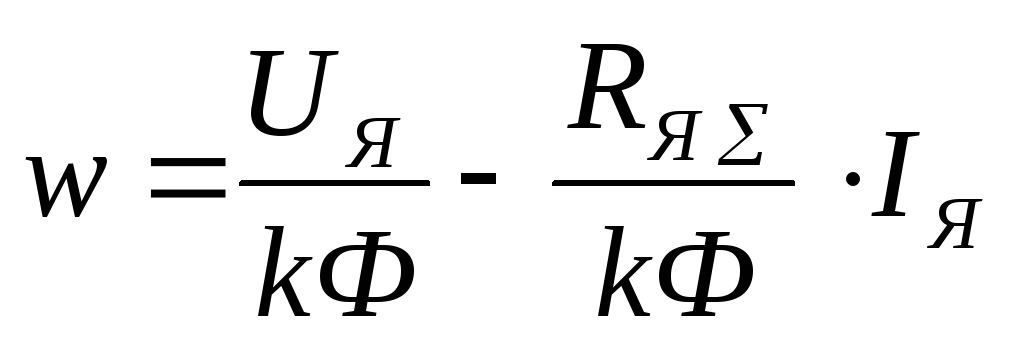
И имеет следующий вид:
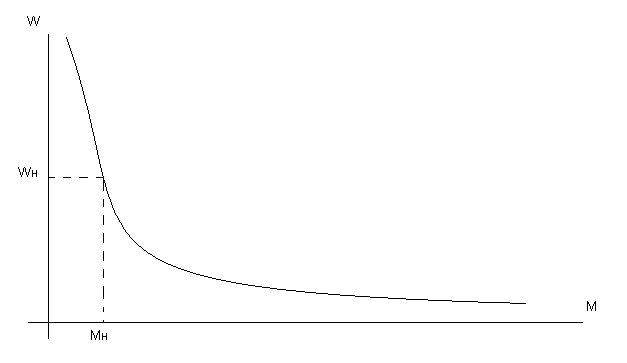
Вид характеристики – гиперболический
– показывает, что при уменьшении момента
скорость двигателя неограниченно
возрастает. Физически это объясняется
условиями электрического равновесия:
при
![]() ,
а это, в связи с уменьшением
,
а это, в связи с уменьшением![]() ,
возможно только при неограниченном
возрастанииw(
,
возможно только при неограниченном
возрастанииw(![]() ).
Реально, в связи с остаточным потоком
).
Реально, в связи с остаточным потоком![]() ,
скорость идеального Х.Х.
,
скорость идеального Х.Х.![]() ,
но вследствие малой величины
,
но вследствие малой величины![]() значение
значение![]() недопустимо велико. По мере возрастания
момента скорость снижается по
гиперболическому закону. Когда машина
насыщена характеристика становится
линейной.
недопустимо велико. По мере возрастания
момента скорость снижается по
гиперболическому закону. Когда машина
насыщена характеристика становится
линейной.
Аналогичный вид имеет и электромеханическая
характеристика. Практически в области
номинальной нагрузки машина насыщается
и увеличение
![]() вызывает увеличение Ф, поэтому
характеристики двигателя приближаются
к характеристикам двигателя независимого
возбуждения.
вызывает увеличение Ф, поэтому
характеристики двигателя приближаются
к характеристикам двигателя независимого
возбуждения.
Способы торможения двигателей постоянного тока последовательного возбуждения.
Существует три способа торможения двигателей постоянного тока последовательного возбуждения:
Динамическое торможение с самовозбуждением;
Динамическое торможение с питанием сериесной обмотки от постороннего источника;
Торможение противовключением.
Динамическое торможение с самовозбуждением.
Режим динамического торможения для таких двигателей отличается от аналогичного режима для двигателей постоянного тока с независимым возбуждением тем, что тормозной момент зависит от потока, который зависит от тока якоря. Следовательно, жесткость характеристики, с уменьшением скорости и ЭДС, будет уменьшаться (интенсивность торможения не постоянна).

Достоинство данного метода состоит в простоте исполнения.
Недостатки метода:
При уменьшении скорости тормозной момент уменьшается значительно быстрее, чем скорость;
При малых скоростях торможение получается малоэффективным.
Торможение противовключением.
Такой режим возможен, когда электродвигатель включен для вращения в одну сторону, а под действием момента нагрузки якорь двигателя вращается в противоположную сторону (генераторный режим). Этот режим можно получить переключением обмоток якоря на ходу.

При переключении «В» на «Н» изменится направление IЯ, и следовательно направление момента

Для ограничения тока якоря вводится RПР.
![]()

При этом бросок IЯограничен значениемIЯ.max.RПРопределяется из:
![]() .
.
В момент равенства w=0 необходимо отключить двигатель от сети. В этом режиме:
![]() .
.
Динамическое торможение с питанием сериесной обмотки от постороннего источника.
На обмотку возбуждения подается напряжение такой полярности, чтобы Е не изменяла своего знака. Якорь замыкается на сопротивление динамического торможения и режим полностью аналогичен режиму динамического торможения двигателей постоянного тока с независимым напряжением. Последовательно с обмоткой возбуждения включается сопротивление.