

Основные показатели регулирования скорости электродвигателей. Способы регулирования скорости электродвигателей постоянного тока последовательного возбуждения.
Для оценки различных способов регулирования скорости существуют следующие параметры:
Диапазон регулирования:
 это соотношение
это соотношение к
к ,
при которых работа привода при
существующих нагрузках будет устойчивой;
,
при которых работа привода при
существующих нагрузках будет устойчивой;Плавность регулирования – характеризуется числом устойчивых скоростей, получаемых в данном диапазоне регулирования;
Экономичность регулирования. Оцениваются капитальные затраты, потери электроэнергии;
Направление возможного регулирования. Вверх или вниз от скорости, определяемой естественной характеристикой.
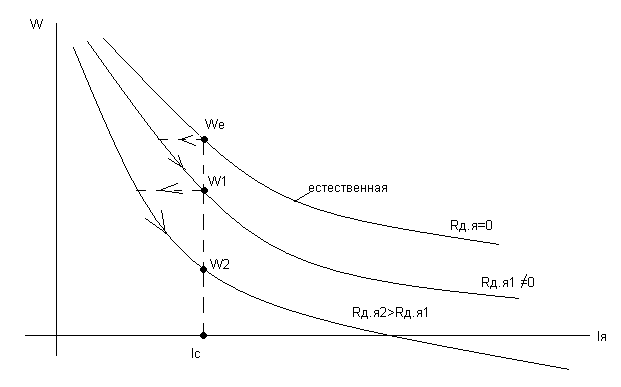
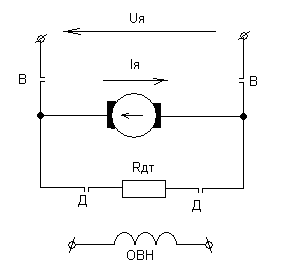
Регулировать скорость двигателей постоянного тока последовательного возбуждения возможно изменением подводимого напряжения и изменением сопротивления якорной цепи.
Р
 егулирование
скорости изменением сопротивления
якорной цепи.
егулирование
скорости изменением сопротивления
якорной цепи.
Введение RД.Яв цепь уменьшает жесткость характеристики и ограничиваетIЯ.
Все вышесказанное про данный способ регулирования применительно к двигателям постоянного тока независимого возбуждения, в полной мере относится и к двигателям постоянного тока последовательного возбуждения.
Регулирование скорости изменением подводимого напряжения.
Все вышесказанное про данный способ регулирования применительно к двигателям постоянного тока независимого возбуждения, в полной мере относится и к двигателям постоянного тока последовательного возбуждения.
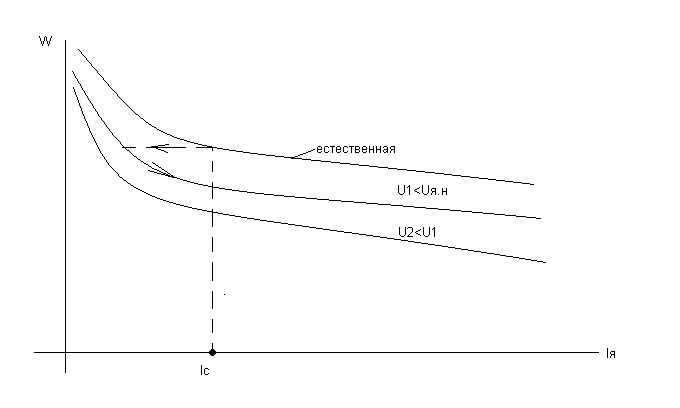
![]()
Расчет тормозных сопротивлений двигателя постоянного тока независимого возбуждения (rдт, rп).
Расчет производится для режимов динамического торможения и противовключения.
Режим противовключения.
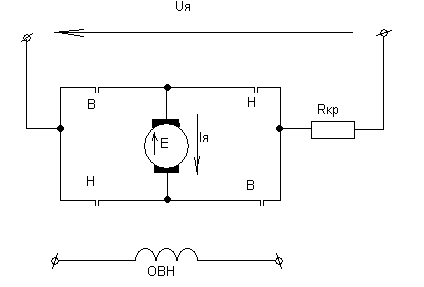
При переключении «В» на «Н» изменится направление IЯ, и следовательно направление момента
Для ограничения тока якоря вводится RКР.
![]()
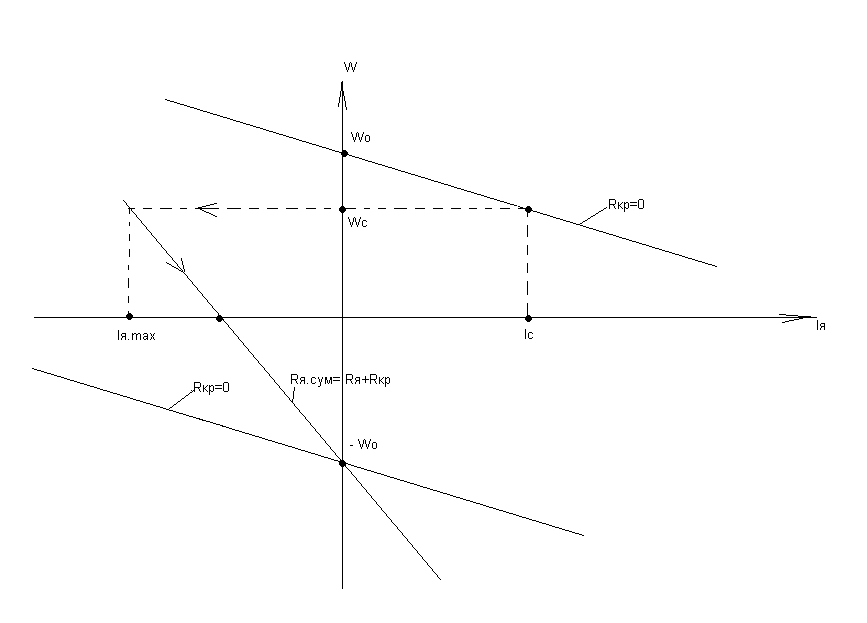
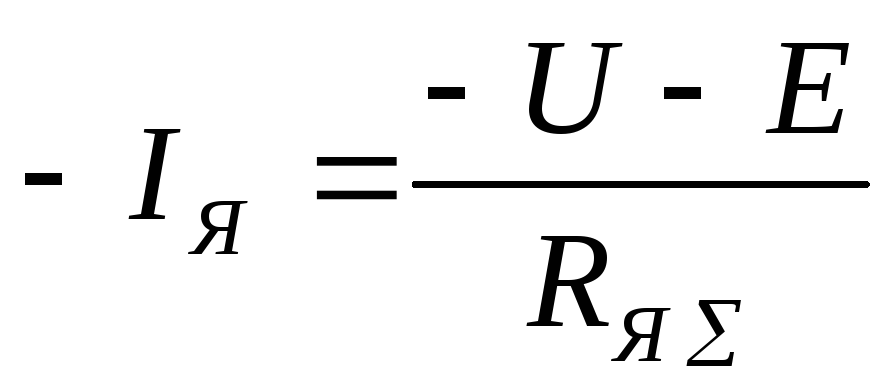
При этом бросок IЯограничен значениемIЯ.max.RКРопределяется из:
![]() .
.
Ток якоря ограничивается на уровне 2,5 от номинального.
Динамическое торможение.
В режиме динамического торможения
электродвигатель отключается от сети
и его якорные зажимы замыкаются на RД.Т.
В этом режиме кинетическая энергия
механизма и двигателя расходуется на
его нагрев. При отключении двигателя
от сети и включении «Д» двигатель по
инерции продолжает вращаться в ту же
сторону, ноIЯменяет
свое направление, т.к. источником
становится двигатель .
.
Очевидно, что при
![]() торможение будет происходить более
интенсивно, но т.к. существует ограничение
наIЯ.max,
то
торможение будет происходить более
интенсивно, но т.к. существует ограничение
наIЯ.max,
то![]() рассчитывается из:
рассчитывается из:
![]() .
.
Расчет пусковых сопротивлений в приводах с двигателями постоянного тока последовательного возбуждения.
Схема пуска двигателя:
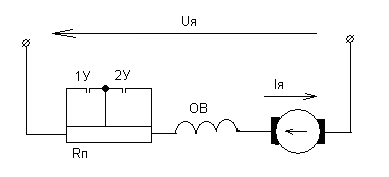
Пуск производится в три этапа:
RП(1У и 2У разомкнуты)
![]() ;
;
1У замкнут – RП1
![]() ;
;
2У замкнут – RП=0
![]() .
.
Расчет пусковых сопротивлений (расчет механической характеристики) можно произвести аналитически (аналогично расчету пусковых сопротивлений двигателей постоянного тока независимого возбуждения).
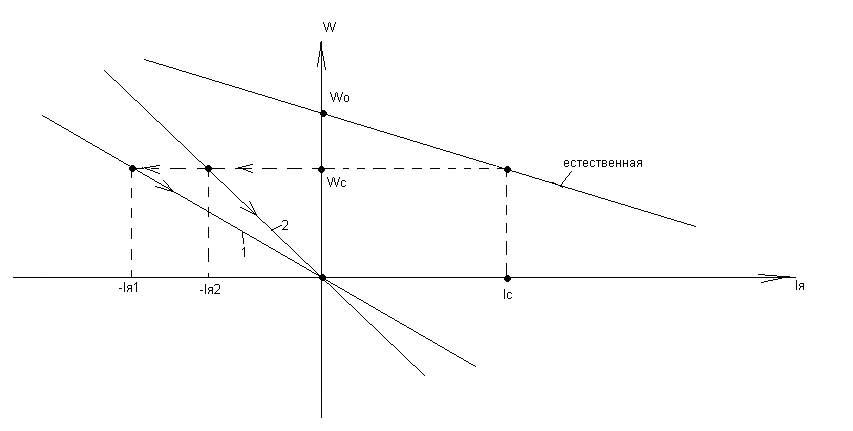
Также расчет можно произвести графоаналитическим методом.

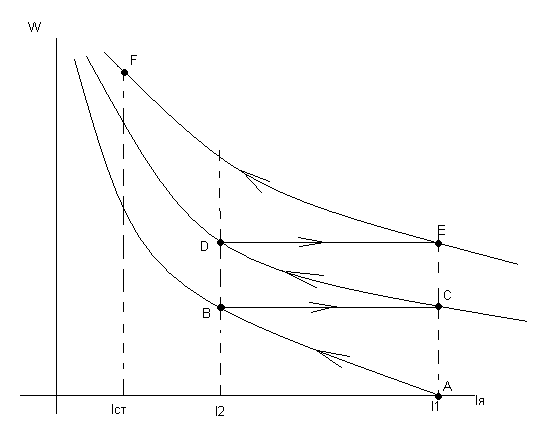
Расстояние ОА соответствует внутреннему сопротивлению двигателя. Откладываем в том же масштабе отрезки Оа=R1=U/I1иOg=R2=U/I2.
Соединяя точки аие, а такжеgиf, получаем две прямые, характеризующие линейную зависимость между скоростью двигателя и сопротивлением его якорной цепи при неизменном токе якоря.
Для того чтобы определить число пусковых ступеней и их сопротивление, необходимо провести вертикальную черту через адо пересечения сgfв точкеb. Затем провести через точкуbлинию, параллельную оси абсцисс, до точкисна линииае. Аналогично провести линииcdи de.
Отрезок bссоответствует первой ступени реостата, аde– второй.