

Расчет и выбор основного электрооборудования вентильного электропривода.
К основному электрооборудованию вентильного электропривода относят: силовой трансформатор, тиристорный преобразователь, сглаживающий дроссель.
Выбор силового трансформатора.
При расчете мощности и выборе трансформатора исходными данными являются следующие основные величины:
а) номинальное напряжение и ток преобразователя;
б) напряжение питающей сети;
в) допустимые колебания питающей сети;
г) число фаз первичной и вторичной обмоток трансформатора;
д) частота сети.
Расчетная мощность трансформатора определяется по формуле:
![]() ,
,
где: ![]() – коэффициент, зависящий от схемы
управления;
– коэффициент, зависящий от схемы
управления;
![]() ;
;
![]() – номинальная ЭДС двигателя;
– номинальная ЭДС двигателя;
![]() – активное сопротивление двигателя
при 80ºС;
– активное сопротивление двигателя
при 80ºС;
![]() – число одновременно работающих
вентилей;
– число одновременно работающих
вентилей;
![]() – падение напряжения на тиристоре;
– падение напряжения на тиристоре;
![]() – расчетные коэффициенты, из справочника;
– расчетные коэффициенты, из справочника;
![]() – коэффициент, учитывающий индуктивность
сети переменного тока;
– коэффициент, учитывающий индуктивность
сети переменного тока;
![]() – возможные колебания питающей сети.
– возможные колебания питающей сети.
Выбор тиристорного преобразователя.
При выборе ТП необходимо руководствоваться
следующим:
![]() ;
;![]() .
.
Также следует учесть перегрузочную
способность ТП:
![]() .
.
Выбор сглаживающего дросселя.
Сглаживающий дроссель включается последовательно с якорем двигателя и его индуктивность выбирается из следующих условий:
а) сглаживание пульсаций выпрямленного тока, до требуемой величины, обеспечивающей удовлетворительную коммутацию двигателя;
б) обеспечение непрерывного выпрямленного тока при минимальной нагрузке на валу двигателя.
Индуктивность сглаживающего дросселя находится по уравнению:
![]() ,
,
где: ![]() – критическая индуктивность, обеспечивающая
выполнение вышеперечисленных условий,
Гн;
– критическая индуктивность, обеспечивающая
выполнение вышеперечисленных условий,
Гн;
![]() – индуктивность обмотки якоря;
– индуктивность обмотки якоря;
![]() – эмпирический коэффициент, для
компенсированных машин
– эмпирический коэффициент, для
компенсированных машин![]() =0,1–0,25,
для некомпенсированных
=0,1–0,25,
для некомпенсированных![]() =0,6.
=0,6.
![]() – индуктивность питающей фазы
трансформатора.
– индуктивность питающей фазы
трансформатора.
Если в результате вычисления значение
![]() окажется отрицательной, то сглаживающий
дроссель не требуется.
окажется отрицательной, то сглаживающий
дроссель не требуется.
Механические характеристики вентильного электропривода.
В общем случае движение электропривода может происходить в двух режимах - установившемся, при котором скорость движения неизменна и переходном (динамическом), характеризующимся изменением скорости. Имеет смысл вначале рассмотреть установившееся движение.
Условием установившегося движения
является равенство моментов двигателя
![]() и момента сопротивления
и момента сопротивления![]() ,
т.е.
,
т.е.![]() .
Проверка выполнения этого условия
обычно осуществляется графически с
помощью механических характеристик
двигателя и исполнительного органа.
.
Проверка выполнения этого условия
обычно осуществляется графически с
помощью механических характеристик
двигателя и исполнительного органа.
Механической характеристикой двигателя
называют зависимость
![]() ,
при определенных условиях, например
при
,
при определенных условиях, например
при![]() ,
,![]() и
и![]() .
.
Различают естественную и искусственные механические характеристики.
Естественная
механическая характеристика – такая
характеристика, которая соответствует
основной схеме включения двигателя и
номинальным параметрам сети питающему
напряжению
![]() ,
магнитному потоку
,
магнитному потоку![]() и дополнительному сопротивлению в цепи
якоря двигателя постоянного тока
и дополнительному сопротивлению в цепи
якоря двигателя постоянного тока![]() .
.
Искусственные механические характеристики получаются в том случае, когда изменяются параметры питающего двигатель напряжения или в цепи обмоток двигателя вводятся дополнительные элементы (резисторы, конденсаторы), а также при включении двигателя по специальной схеме.
На рисунке 1 представлены механические характеристики двигателей:
1 - ДПТ независимого возбуждения;
2 - двигателя последовательного возбуждения;
Степень изменения скорости с изменением момента может быть различной, и характеризуется жесткостью механических характеристик. Критерием для оценки жёсткости характеристики может служить их крутизна.
Жесткость механической характеристики
электропривода – это соотношение
разности электромагнитных моментов,
развиваемых двигателем (рисунок 2) к
соответствующей разности угловых
скоростей электропривода, т.е.
![]() .
.
Обычно на рабочих участках механические характеристики двигателей имеют отрицательную жесткость ( < 0).
Линейные
механические характеристики обладают
постоянной жесткостью. При нелинейных
характеристиках их жесткость не постоянна
и определяется в каждой точке, как
отношение производных момента и угловой
скорости
![]() .
.
Иногда удобнее пользоваться понятием относительной жёсткости
![]() или
или![]() .
.
Если принять
![]() ,
в этом случае
,
в этом случае![]() ,
,
где ![]() - относительная величина изменения
момента двигателя;
- относительная величина изменения
момента двигателя;
![]() - относительная величина изменения
скорости двигателя.
- относительная величина изменения
скорости двигателя.
По жесткости механические характеристики двигателей могут быть классифицированы:
1) абсолютно жесткая механическая
характеристика (![]() ),
когда
),
когда![]() при различной нагрузке;
при различной нагрузке;
2) жесткая механическая характеристика – это характеристика, при которой скорость с изменением момента хотя и уменьшается, но в малой степени (двигатели постоянного тока независимого возбуждения);
3) мягкая механическая характеристика – характеристика, при которой с изменением момента скорость значительно изменяется (двигатели последовательного возбуждения или двигатели смешанного возбуждения);
4) абсолютно мягкая механическая
характеристика (![]() )
– это характеристика, при которой
)
– это характеристика, при которой![]() ,
при изменении скорости (двигатели
постоянного тока независимого возбуждения
при питании их от источника тока или
при работе в замкнутых системах
электропривода в режиме стабилизации
тока якоря).
,
при изменении скорости (двигатели
постоянного тока независимого возбуждения
при питании их от источника тока или
при работе в замкнутых системах
электропривода в режиме стабилизации
тока якоря).
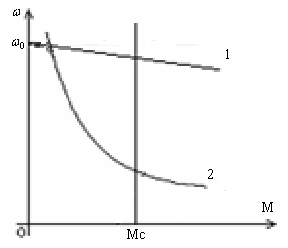
Рисунок 1

Рисунок 2