

лекции / DSP_15
.pdf1
Лекция 15. Эффекты квантования в цифровых системах (часть 2)
1.Шум умножителя.
2.Собственный шум цифровой системы.
3.Полный шум на выходе цифровой системы.
4.Ошибки квантования коэффициентов.
5.Эффекты переполнения в сумматорах.
6.Понятие о предельных циклах.
15.1.Шум умножителя
Сучетом предположений об ошибках для определения оценок шума умножителя используем линейную модель (рис 15.1). (Ошибки квантования от других источников отсутствуют; шумы квантования не коррелированны с сигналом).
Возможность использования линейной модели обусловлена предположением об ошибках:
ошибки квантования от различных источников независимы;
шумы квантования не коррелированны с сигналом.
|
|
|
eу(nT) |
|
|
|
|
|||
|
x(nT) |
a |
|
ax(nT) eу (nT) |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 15.1. Линейная модель для оценки шума одного умножителя |
|
|||||||||
С учетом предположения |
о том, что |
|
любой |
шум — |
равномерный |
белый, |
||||
детерминированные и вероятностные |
оценки |
шума |
умножителя |
eу (nT) |
||||||
определяются так же, как для шума АЦП eвх (nT), а именно:
детерминированная оценка шума при округлении:
max |
|
e (nT) |
|
|
Qу |
2 bу 1 ; |
(15.1) |
|
|
||||||
|
|
|
|||||
n |
|
у |
|
2 |
|
|
|
|
|
|
|
|
|||
статистические оценки — математическое ожидание и дисперсия шума:
|
|
μe 0; |
|
|
(15.2) |
|||
|
|
|
у |
|
|
|
|
|
σ |
2 |
|
Qу |
|
2 2bу |
|
||
eу |
|
|
|
, |
(15.3) |
|||
|
|
12 |
||||||
|
12 |
|
|
|
|
|||
где bу — разрядность (количество значащих битов) цифрового устройства с ФТ
(ЦПОС, ПЛИС и т. п.), аQу — соответствующий шаг квантования.
15.2. Собственный шум цифровой системы
Собственный шум создается всеми умножителями и зависит от структуры цифровой системы.
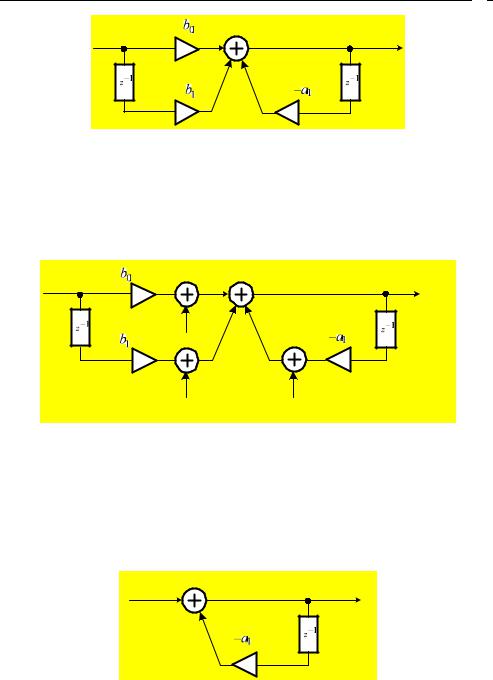
Рассмотрим методику оценки собственного шума на простейшем примере рекурсивного звена 1-го порядка с прямой структурой (рис. 15.2) и передаточной функцией:
H(z) |
b b z 1 |
|
|
|
0 1 |
. |
(15.4) |
||
1 a z 1 |
||||
|
|
|
||
1 |
|
|
||
2
Рис. 15.2. Прямая структура рекурсивного звена 1-го порядка
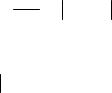
С учетом предположения о независимости ошибок квантования от различных источников и линейной модели оценки шума одного умножителя (рис. 15.1), для
оценки собственного шума eс (nT), обусловленными всеми умножителями,
используем линейную модель (рис. 15.3).
eс (nT)
eу (nT)
eу (nT) eу (nT)
Рис. 15.3. Линейная модель для оценки собственного шума рекурсивного звена 1-го порядка с прямой структурой
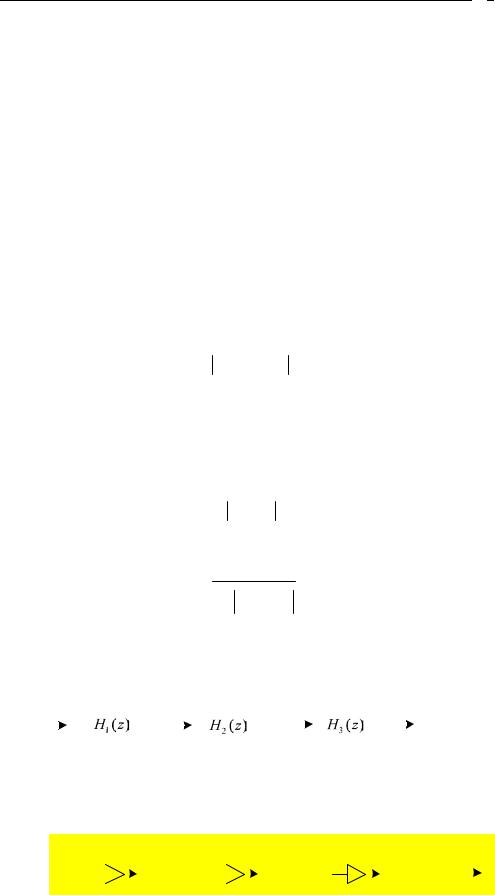
Согласно свойству аддитивности для шумов от различных источников, линейную модель с тремя источниками шума (рис. 15.3) можно заменить эквивалентной линейной моделью с одним источником шума на (рис. 15.4):
γ(nT) 3eу (nT). |
(15.5) |
γ(nT) eс (nT)
Рис. 15.4. Эквивалентная линейная модель для оценки собственного шума рекурсивного звена 1-го
Входной шум γ(nT) обрабатывается рекурсивной частью звена с передаточной функцией
H |
|
(z) |
1 |
. |
(15.6) |
|
э |
1 a z 1 |
|||||
|
|
|
|
|||
|
|
|
1 |
|
|
Получим оценки входного шума γ(nT), используя их свойство аддитивности для оценок трех умножителей:
детерминированная оценка при округлении:
|
|
γ(nT) |
|
|
|
e (nT) |
|
3Qу |
3 |
|
bу |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
max |
|
|
3max |
|
|
|
|
|
2 |
|
; |
(15.7) |
||
|
|
|
|
|
|
|||||||||
n |
|
|
|
n |
|
у |
|
2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
статистические оценки (мат. ожидание и дисперсия):
μ 3μeу |
0; |
(15.8) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
||
|
2 |
|
|
|
2 |
|
|
Qу |
|
2 2bу |
2 2bу |
|
|
|
||
σ |
|
|
3σ |
eу |
3 |
|
3 |
|
|
|
. |
(15.9) |
||||
|
12 |
12 |
4 |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Получим оценки выходного |
шума |
|
eс (nT) — собственного шума |
цифровой |
||||||||||||
системы, используя формулу свертки: |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
eс (nT) e [(n m)T]hэ(mT), |
|
|
|
|||||||||||||
|
|
|
|
|
m 0 |
|
|
|
|
|
|
|
|
|
|
|
где hэ(nT) — ИХ эквивалентной линейной модели (рис. 15.4): |
|
|
|
|||||||||||||
|
|
|
|
|
h (nT) ( a )n . |
|
|
(15.10) |
||||||||
|
|
|
|
|
|
э |
|
|
|
1 |
|
|
|
|
|
|
Детерминированные и статистические оценки собственного шума цифровой системы получаются аналогично оценкам шума АЦП на выходе ЛДС (см. разд. 14.4) при заменах:
|
|
|
eвх (nT) γ(nT) |
|
|
и eАЦП (nT) |
|||||||||||||||
Детерминированная оценка: |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
max |
|
eс |
(nT) |
|
max |
|
γ(nT) |
|
|
|
hэ(mT) |
|
|
||||||||
|
|
|
|
|
|
||||||||||||||||
n |
|
|
|
|
|
|
n |
|
|
|
|
|
|
m 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
С учетом (15.10): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
3Qу |
|
|
|||||||
|
|
|
max |
|
eс (nT) |
|
|
|
|
( a1) |
|||||||||||
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
2 |
|
|||||||||||||||
|
|
|
|
|
n |
|
|
|
|
|
n 0 |
||||||||||
eс(nT) .
3Qу hэ(mT) .
2 m 0
n 3Qу |
1 |
|
|
||||
|
|
|
|
|
|
. |
(15.11) |
|
1 |
|
a1 |
||||
2 |
|
|
|
||||
Статистические оценки: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
μe 0. |
|
|
|
|
|
|
|
|
|
(15.12) |
||
|
|
|
|
|
с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
σ2eс |
σ2γ |
|
hэ (mT) |
|
. |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
m 0 |
|
|
|
|
|
|
|
|
|
|
|
|
С учетом (15.9) и (15.10): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
Qу |
|
|
2n |
Qу |
|
|
1 |
|
|
|
|
|||
σ |
3 |
|
( a1) |
|
|
|
|
|
|
. |
(15.13) |
||||||
eс |
|
|
4 |
|
1 |
|
a |
|
2 |
||||||||
|
|
|
|
|
|||||||||||||
|
|
|
12 n 0 |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
15.3. Полный шум на выходе шум цифровой системы
Согласно свойству аддитивности, оценки полного шума на выходе цифровой системы равны сумме оценок шума АЦП и собственного шума.
15.4. Ошибки квантования коэффициентов
Ошибки квантования коэффициентов bi и ak приводят к изменению нулей и полюсов. Следовательно:
изменяется АЧХ, которая при новых коэффициентах (нулях и полюсах), может
не удовлетворять заданным требованиям;
рекурсивная цифровая система может оказаться неустойчивой.
15.5. Эффекты переполнения в сумматорах
Если при сложении чисел результат по модулю превысит единицу, это приведет к переполнению — попытке переноса старшего значащего бита в знаковый и недостоверности результата.
Для предотвращения переполнения в цифровую систему добавляют коэффициенты масштабирования.
Наиболее сложным является предотвращение переполнений в каскадных структурах рекурсивных цифровых систем с сумматорами в каждом каскаде.
4
В общем случае для предотвращения переполнения на выходе i-го каскада необходимо обеспечить условие:
max |
yi(nT) |
1, |
(15.14) |
n |
|
|
|
где yi(nT) — реакция на выходе i-го каскада, определяемая по формуле свертки
|
|
|
|
|
||||||||
yi(nT) hi (mT)x[(n m)T], |
(15.15) |
|||||||||||
|
|
|
m 0 |
|
||||||||
hi (mT) — ИХ части структуры от входа до выхода i-го каскада. |
|
|||||||||||
Следовательно, условие (15.14) сводится к условию |
|
|||||||||||
|
|
|
|
|
|
|||||||
|
|
|
|
|||||||||
max |
hi(mT)x[(n m)T] |
|
|
1, |
|
|||||||
|
m 0 |
|
|
|
|
|||||||
или |
|
|||||||||||
|
|
|||||||||||
max |
|
hi(mT) |
|
|
|
x[(n m)T] |
|
1. |
(15.16) |
|||
|
|
|
|
|||||||||
m 0 |
|
|||||||||||
В цифровых системах с ФТ максимальное значение воздействия по модулю не превосходит 1:
max x[(n m)T] 1.
Поэтому условие (15.16) эквивалентно условию
|
|
||||
|
|
hi (mT) |
|
1. |
(15.17) |
|
|
||||
m 0 |
|
||||
Однако ИХ цифровой системы задана, поэтому для предотвращения переполнения вводится коэффициент масштабирования γi :
γi hi (mT) 1,
m 0
который рассчитывается из условия
γi |
|
1 |
|
|
. |
(15.18) |
hi (mT)
m 0
Рассмотрим алгоритм учета коэффициентов масштабирования в каскадной структуре на примере трех каскадов (рис. 15.5).
x(nT) |
|
y1(nT) |
y2(nT) |
y |
3(nT) y(nT) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 15.5. Каскадная структура рекурсивной ЛДС
1.Рассчитываются коэффициенты масштабирования для каждого из трех каскадов
(рис. 15.6).
x(n) |
γ |
|
|
γ2 |
|
|||||
1 |
|
|
H1(z) |
|
|
|
|
H2(z) |
||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
γ3 |
|
y(n) |
||||
H3(z) |
||||||
|
|
|
|
|
||
|
|
|
|
|
||
|
|
|
|
|
|
|
Рис. 15.6. Каскадная структура с учетом коэффициентов масштабирования
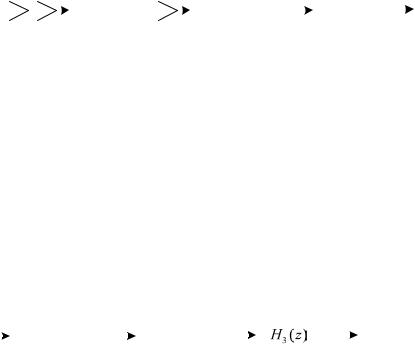
2.Для уменьшения дисперсии собственного шума коэффициенты масштабирования вносятся в предыдущее звено (рис. 15.7).
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x(n) |
γ1 γ |
2 |
|
|
|
|
γ3 |
|
|
|
|
y(n) |
|||||||||
|
|
|
|
|
|
|
H1(z) |
|
|
|
|
H2(z) |
|
|
H3(z) |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 15.7. Каскадная структура с коэффициентами масштабирования в предыдущих звеньях
3.Для уменьшения числа умножителей, что влечет за собой возрастание собственного шума, коэффициенты масштабирования учитываются в числителе передаточной функции каждого звена (рис. 15.8):
|
|
|
H |
|
(z) γ γ |
|
b b z 1 b z 2 |
|
b |
b |
|
z 1 b |
|
z 2 |
|||||||||||||||||||||||
|
|
|
|
|
01 |
11 |
|
|
|
|
21 |
|
|
01 |
11 |
|
|
|
21 |
|
|
|
|
||||||||||||||
|
2 1 a z |
1 a |
|
|
|
|
1 a z 1 |
a |
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
1 |
|
1 |
|
21 |
z 2 |
|
|
21 |
z 2 |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
11 |
|
|
|
|
|
|
|
|
|
|
11 |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
H2(z) γ3 |
b b z |
1 b z 2 |
|
b b |
z 1 |
b |
z 2 |
|||||||||||||||||||||||||||
|
|
|
02 |
|
12 |
|
|
22 |
|
|
|
|
02 |
|
12 |
|
|
|
|
22 |
|
|
|
|
|
||||||||||||
|
|
|
1 a z 1 a |
22 |
z 2 |
|
|
1 a z 1 a |
22 |
z 2 |
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
12 |
|
|
|
|
|
|
|
|
|
|
12 |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
H |
|
(z) |
|
b b z 1 b z 2 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
3 |
|
03 13 |
|
|
|
|
23 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
1 a z 1 |
a z 2 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
13 |
|
|
|
|
23 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x(nT) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y(nT) |
||||
|
|
|
|
H |
(z) |
|
|
|
|
|
|
|
|
H2(z) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 15.8. Каскадная структура с учетом умножителей в коэффициентах числителей передаточных функций звеньев
15.6.Понятие о предельных циклах
Ваналоговых линейных системах в отсутствии воздействия влияние ненулевых начальных условий со временем затухает.
Пример 15.1
Рассмотрим, к чему могут привести ненулевые начальные условия в рекурсивных цифровых системах в отсутствии воздействия на простейшем примере
y(n) x(n) 0,8y(n 1)
при следующих условиях:
x(n) 0; y( 1) 1.
Результат округляется до одной десятичной цифры после запятой.
Вычислим точное и фактическое значения реакции.
n |
Точное значение y(n) |
Фактическое значение y(n) |
|
|
|
0 |
-0,8 |
-0,8 |
|
|
|
1 |
0,64 |
0,6 |
|
|
|
2 |
-0,48 |
-0,5 |
|
|
|
3 |
0,4 |
0,4 |
|
|
|
4 |
-0,32 |
-0,3 |
|
|
|
5 |
0,24 |
0,2 |
|
|
|
6 |
-0,16 |
-0,2 |
|
|
|
7 |
0,16 |
0,2 |
|
|
|
Пример 15.2
Рассмотрим вычисление ИХ рекурсивного звено первого порядка с РУ:
y(n) x(n) 0,9y(n 1).

6
При вычислении ИХ воздействие представляет собой цифровой единичный импульс:
x(n) u0(n),
поэтому РУ принимает вид:
h(n) u0(n) 0,9h(n 1).
Начальные условия нулевые (ННУ):
h( 1) 0.
Результат (ИХ) округляется до одной десятичной цифры после запятой.
Передаточная функция и ИХ звена равны
|
H(z) |
1 |
|
h(n) 0,9n . |
|
1 0,9z 1 |
|||
|
|
|
|
|
В отсутствие округления ИХ затухает и при n стремится к нулю. |
||||
Вычислим точное и фактическое значения ИХ. |
|
|||
|
|
|
||
n |
Точное значение ИХ h(n) |
Фактическое значение ИХ h(n) |
||
|
|
|
|
|
0 |
1 |
|
1 |
|
|
|
|
|
|
1 |
0,9 |
|
0,9 |
|
|
|
|
|
|
2 |
0,81 |
|
0,8 |
|
|
|
|
|
|
3 |
0,72 |
|
0,7 |
|
|
|
|
|
|
4 |
0,63 |
|
0,6 |
|
|
|
|
|
|
5 |
0,54 |
|
0,5 |
|
|
|
|
|
|
6 |
0,45 |
|
0,5 |
|
|
|
|
|
|
7 |
0,45 |
|
0,5 |
|
|
|
|
|
|
В обоих случаях полученный эффект объясняется тем, что мы отошли от одного из предположения об ошибках квантования — собственный шум не коррелирован с сигналом.
Предельным циклом низкого уровня называют последовательность отсчетов постоянной величины или незатухающее периодическое колебание, возникающие на выходе рекурсивной цифровой системы за счет эффектов квантования.
Анализ возможности возникновения предельных циклов достаточно сложен и, как правило, выполняется посредством моделирования цифровой системы.