

179
Глава 10
Колебания упругих систем
Колебаниями упругих систем называют их повторяющиеся, периоди-
ческие движения, которые они совершают около своего статического поло-
жения равновесия.
Поведение конструкций и машин при их колебательных движениях требует особого внимания инженеров. Известны случаи, когда строитель-
ные сооружения или машины, рассчитанные с большим запасом на стати-
ческую прочность, разрушались под действием сравнительно небольших периодически действующих сил вследствие резонанса, либо, так называ-
емой, колебательной неустойчивости.
10.1.Степень свободы колеблющейся системы
Колебания упругих систем принято различать по числу степеней свобо-
ды n. Для упругой системы с геометрическими (голономными) связями под числом степеней свободы понимается число независимых координат, опре-
деляющих положение системы.
В случае кинематических (неголономных) связей число степеней сво-
боды определяется числом независимых возможных перемещений.
На рис. 10.1
приведены примеры систем с сосредоточенными
массами, степень свободы которых
определяется по числу независимых
перемещений
![]() ,
этих масс. В этих примерах мы пренебрегаем
массой, распределённой в элементах
самой системы.
,
этих масс. В этих примерах мы пренебрегаем
массой, распределённой в элементах
самой системы.
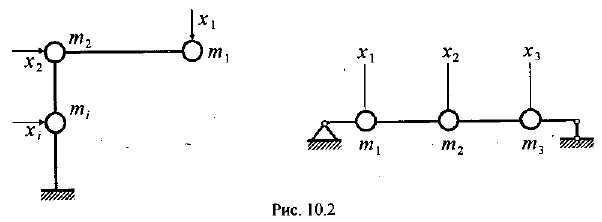
Реальная
система обладает бесконечным числом
степеней свободы. Рассмотрим, например,
балку на двух опорах (рис. 10.2). Ее можно
разбить на любое число участков (в том
числе и бесконечно малых d![]() ).
Массу каж-
).
Массу каж-
дого участка можно сосредоточить в его середине. В зависимости от числа полученных сосредоточенных масс и количества их независимых переме-
щении мы можем легко подсчитать степень свободы системы. В пределе, когда число участков стремится к бесконечности, приходим к системе с бесконечным числом степеней свободы. В изображенном на рис. 10.2 случае n = 4.
180

Рис. 10.1
а) б)
Рис. 10.2
Таким образом, число степеней свободы системы определяется факти-
чески выбором ее расчетной схемы т.е. степенью приближения, к реальной системе. Если, например, балка несет один сосредоточенный груз
(рис. 10.1,а), масса которого значительно превышает массу самой балки, то в расчетной схеме системы естественно пренебречь массой балки и считать n = 1.
181
10.2. Канонические уравнения колебания упругих систем
с конечным числом степеней свободы
Рассмотрим упругую систему, несущую несколько сосредоточенных масс (i = 1,2, …, i). Пусть хi - силы, приложенные к этим грузам в направ-
лении их смещений (рис. 10.3).

Рис. 10.3
Тогда перемещения этих грузов в направлении приложенных сил по закону Гука и принципу независимости действия сил определяются по формулам:
 (10.1)
(10.1)
или в сокращённой записи
 (10.2)
(10.2)
Здесь
![]() -
коэффициенты влияния, определяемые с
помощью формулы Мора. Представим теперь,
что наша система пришла в движение.
Выясним природу сил
-
коэффициенты влияния, определяемые с
помощью формулы Мора. Представим теперь,
что наша система пришла в движение.
Выясним природу сил
![]() в этом
случае. На сосредоточенную массу может
действо-
в этом
случае. На сосредоточенную массу может
действо-
вать внешняя
сила![]() ,зависящая
от времени и, согласно принципу Дала-
,зависящая
от времени и, согласно принципу Дала-
мбера, - сила
инерции .
Следовательно,
.
Следовательно,
![]() (10.3)
(10.3)
Здесь точки над означают двукратное дифференцирование по вре-
мени. В свою очередь
сила
![]() может
состоять из постоянной
может
состоять из постоянной
![]() (напри-
(напри-
182
мер, вес груза) и
переменной
![]() частей:
частей:
![]() (10.4)
(10.4)
Подставляя (10.3) в (10.2), получим форму записи уравнений движения упругих систем с конечным числом степеней свободы:
 (10.5)
(10.5)
которые называются каноническими уравнениями колебаний упругих сис-
тем. При исследовании колебаний различают собственные (свободные) и вынужденные колебания. Под собственными колебаниями системы пони-
мают такие, которые
она совершает при отсутствии внешнего
силового воздействия, т.е. предоставленная
самой себе. В этом случае
![]() и колебания поддерживаются только
упругими силами. Под вынужденными
колебаниями упругой системы понимают
такие, которые происходят под действием
возмущающих сил
и колебания поддерживаются только
упругими силами. Под вынужденными
колебаниями упругой системы понимают
такие, которые происходят под действием
возмущающих сил
![]() .
.