

1.6.2. САУ газотурбинным двигателем. Газотурбинные двигатели (ГТД) современных летательных аппаратов (ЛА) являются сложными многомерными многорежимными объектами управления (рис. 1.11), где ВУ – входное устройство; К – компрессор; КС – камера сгорания; ГТ – газовая турбина; ФКС – форсажная камера сгорания; РС – реактивное сопло.
Отличительной особенностью разрабатываемых ГТД является увеличение числа регулируемых параметров и регулирующих воздействий, расширение диапазона условий работы и эксплуатационных режимов. Для получения необходимой силы тяги и экономичности двигателя необходимо регулировать частоты вращения роторов, температуру газа, значения давлений воздуха и газа, а также другие параметры. Управляющими воздействиями являются расходы топлива в основную Gт и форсажную Gтф камеры
сгорания, площади сечений сопла Fс и Fкр, углы поворота лопаток
i.
Рис. 1.11. Двухконтурный ГТД с форсажной камерой сгорания
САУ ГТД является многоконтурной многосвязной системой, причем число управляющих воздействий в ГТД может быть меньше числа его управляемых координат.
Структурная схема многосвязной логико-динамической САУ ГТД с селективным выбором каналов приведена на рис. 1.12, где Р – регуляторы; ИУ – исполнительные устройства; И – измерители выходных координат; АС – алгебраические селекторы.
28
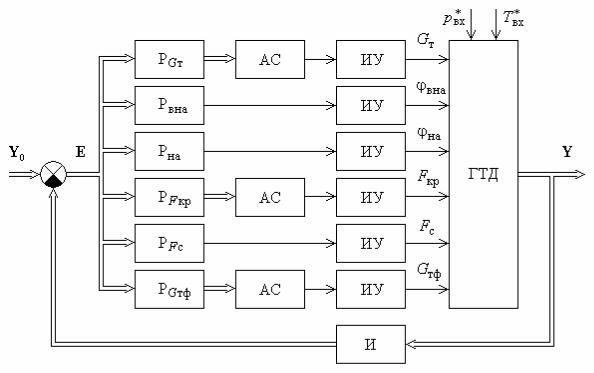
Рис. 1.12. Структурная схема многосвязной САУ ГТД
1.6.3. САУ летательным аппаратом. Для решения задач наведения летательных аппаратов (ЛА) используются инерциальные системы управления, в которых имеется бортовая цифровая вычислительная машина (БЦВМ). При таком варианте построения математическое моделирование параметров движения ЛА производится с помощью измерителей – блока акселерометров и блока датчиков угловых скоростей (ДУС), жестко установленных на борту ЛА по трем осям связанной системы координат. Структурная схема одного из вариантов такой системы представлена на рис. 1.13.
Три датчика угловой скорости (блок ДУС) выдают в вычислитель информацию об угловых скоростях поворота ЛА относительно трех его осей: ωx, ωy, ωz. В вычислительном
устройстве после |
интегрирования этих параметров по времени |
и умножения на |
направляющие косинусы определяется угловая |
ориентация ЛА в инерциальной системе координат – углы , ψ, . Одновременно с трех акселерометров, также жестко
закрепленных на корпусе ЛА, получают значения составляющих ускорения, которые в вычислительном устройстве интегрируются
29
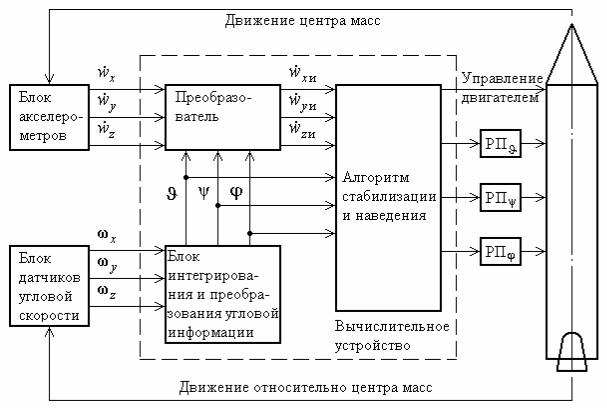
и пересчитываются в составляющие скорости и координаты в инерциальной системе координат.
Рис. 1.13. Схема инерциальной навигационной системы управления
Вся эта информация передается в вычислительное устройство (БЦВМ), которое рассчитывает текущие значения скорости и координат после интегрирования показаний акселерометров. Далее БЦВМ вырабатывает управляющие команды на исполнительные устройства: команды на изменение режима работы основного двигателя, его выключение, отделение ступеней и команды на рулевые приводы РП , РПψ, РП , для управления угловыми
скоростями и углами тангажа, рыскания и вращения.
Контрольные вопросы
1.Что такое регулирование?
2.Что такое управление?
3.Какие звенья входят в состав системы автоматического управления, блок-схема такой системы?
4.Какие функции выполняет управляющее устройство?
30
5.Каковы достоинства и недостатки систем разомкнутого управления?
6.Каковы достоинства и недостатки систем замкнутого управления?
7.Что представляют собой системы комбинированного управления?
8.Виды систем автоматического регулирования?
9.Как построена блок-схема многомерной системы управления?
10.Дать определение линейной системы управления.
11.Дать определение адаптивной системы управления.
12.Перечислите основные свойства систем автоматического управления.
31