

3832
.pdfвыборе типа регулятора исходят, прежде всего, из следующих соображений. Из номенклатуры выпускаемых промышленностью регуляторов выбирается простей-
ший по закону регулирования (т е наиболее дешевый и простой в эксплуатации) регулятор, который позволяет с учетом динамических свойств данного объекта обеспечить требуемое качество регулирования.
При этом учитываются следующие правила:
1. П - регуляторы (статические) могут применяться на объектах с плохими динамическими характеристиками (в тех случаях. когда допускается большое зна-
чение статической ошибки).
2. И - регуляторы (астатические) могут применяться в тех случаях когда до-
пускается большое время регулирования для И – регуляторы не применимы для регулирования объектов без самовыравнивания и с запаздыванием, так как процесс регулирования может быть неустойчивым.
3.ПИ-регуляторы (изодромные) могут применяться при любых требованиях
квеличине ошибки и при любом диапазоне изменения возмущения, если допусти-
мое время регулирования превышает 6 ( - постоянная времени запаздывания), т.е. tp>6 . Это наиболее распространенный тип регуляторов.
4. ПИДрегуляторы необходимо использовать для достижения времени ре-
гулирования в пределах 6 >tp> 4 .
5. Релейные регуляторы применимы к объектам, для которых допустимы ав-
токолебания.
Для окончательного выбора необходимо провести некоторые расчеты. Как показывают исследования систем с различными объектами и регуляторами при вы-
боре типа регулятора, можно пользоваться следующими соотношениями. 1) Релейные регуляторы применимы при условии:
xcp% 100 , где То – постоянная времени объекта; τ – время запаздыва-
T0
ния.
2) П- регуляторы применимы, если общий коэффициент усиления системы
можно выбрать из условия:
|
|
|
|
|
K |
o |
F |
|
|
|
|
Kc |
KoKp |
|
|
1 |
|
– для объектов с самовыравниванием и |
|||||
x |
|||||||||||
|
|
|
|
|
|
|
|
||||
Kc |
|
F |
|
|
|
|
|
|
|
||
|
|
|
– для объектов без самовыравнивания. |
||||||||
|
|||||||||||
|
|
x |
|
|
|
|
|
|
|
||
Такой выбор может привести в ряде случаев к неустойчивой системе или к системе с недопустимым колебательным процессом, тогда П -регулятор неприме-
ним.
481
3) И -регуляторы применимы:
а) если x< xн – допустимое значение ошибки x меньше зоны нечувстви-
тельности регулятора xн;
б) если регулятор должен обеспечивать работу объекта при непрерывно из-
меняющемся возмущении, то для устойчивости такой системы должно выполнять-
ся условие, чтобы максимальная скорость регулирующего воздействия была больше скорости изменения возмущения.
4) ПИ- и ПИД -регуляторы позволяют получить достаточно малые отклоне-
ния без нарушения условий устойчивости.
Пропорциональные регуляторы применяют (с точки зрения характера возмущений) в тех случаях, когда возмущения носят кратковременный (пиковый) ха-
рактер. При этом остаточные отклонения регулируемой величины могут быть све-
дены к минимуму.
Если возмущения являются длительными (т. е. продолжительность возмущений значительно превышает время регулирования системы с П -регулятором)
или возмущения изменяются беспрерывно, то при использовании П -регулятора будут длительные и с большой амплитудой отклонения регулируемой величины. В
этих случаях П -регуляторы не применяют. При применении И-, ПИ- и ПИД - регуляторов в случае неустановившихся возмущений, изменяющихся с постоянной скоростью, необходимо, чтобы максимальная скорость исполнительного механиз-
ма регулятора была больше скорости изменения возмущения, иначе отклонение ре-
гулируемой величины будет накапливаться (т. к. компенсация возмущения происходит медленнее, чем его изменение) и достигнет недопустимой величины.
Эти соображения применимы, в основном, для систем с одним регулятором и одной регулируемой величиной. Для более сложных систем (например, системы связанного регулирования с несколькими регуляторами и регулируемыми величинами) существуют особые правила подбора регуляторов. Во всех случаях увеличе-
ние неравномерности регулятора и его времени восстановления приводит к более устойчивому регулированию, но вместе с тем увеличивает статическую ошибку и время регулирования.
На основании параметров объекта регулирования То, , Ко и типа выбранного регулятора рассчитываются их параметры настройки исходя из требований техно-
логического режима. В простейших случаях стабилизации регулируемой величины возможно применение табличных методов определения настроек регуляторов, в
более сложных – применяют расширенное D- разбиение или иные методы, более подробно излагаемые в /24, 92/.
5.2.7. Аффинная параметризация регуляторов.
482
Под аффинной параметризацией понимается линейное преобразование модели объекта управления /2/
W( s ) Q( s )WO ( s ), |
(5.43) |
где Q(s) – линейный оператор, WO(s) – передаточная функция объекта управ-
ления. Нетрудно видеть, что (5.43) соответствует передаточной функции ра-
зомкнутой системы. В случае замкнутой системы, передаточная функция от входа к выходу
|
WR ( s )WO |
( s ) |
|
|
(s ) |
|
|
, |
(5.44) |
|
|
|||
1 WR (s )WO (s )
нелинейна относительно передаточной функции регулятора WR(s), что суще-
ственно затрудняет его настройку, обеспечивающую достижение желаемой цели. Идея аффинной параметризации заключается в представлении (5.44) в
виде (5.43), что возможно, если:
|
WR |
(s ) |
|
|
Q(s ) |
|
|
. |
(5.45) |
|
|
|||
|
1 WR (s)WO (s ) |
|
||
С учетом (5.45) передаточную функцию замкнутой системы (5.44) |
||||
можно представить в виде |
|
|
|
|
(s ) Q(s )WO ( s ). |
(5.46) |
|||
Таким образом, при использовании идей аффинной параметризации
синтез регулятора осуществляется в два этапа. На первом этапе осуществля-
ется синтез оператора Q(s), а на втором – определение передаточной функ-
ции регулятора. В соответствии с (5.45) передаточная функция регулятора определяется выражением:
WR (s ) |
Q(s ) |
|
, |
(5.47) |
|
1 Q(s )WO (s ) |
|||||
|
|
|
|||
известным как параметризация Йола. /2/
Анализ (5.46) показывает, что устойчивость замкнутой системы, при устойчивом объекте, обеспечивается при любой устойчивой собственной пе-
редаточной функции Q(s). Кроме того из (5.46) также следует, что замкнутая система будет ковариантна по отношению к управляющему воздействию только на тех частотах, на которых Q(j ) инвертирует модель объекта управ-
ления. Последнее делает рациональным выбор Q(s) в виде
483
(5.48)
где FQ(s) – желаемая передаточная функция замкнутой системы (формирую-
щий фильтр). Вместе с тем, анализ (5.48) показывает, что если устойчивая передаточная функция WO(s) содержит неминимально-фазовые нули, то ее инверсия приведет к неустойчивости Q(s) и, следовательно – к неустойчиво-
сти замкнутой системы. Поэтому в случае, когда передаточная функция объ-
екта управления содержит неминимально-фазовые нули Q(s) целесообразно представить в виде
|
Q(s) F (s)Wi |
(s), |
(5.49) |
|||
|
|
Q |
O |
|
|
|
где W i |
( s ) – устойчивое приближение |
|
1 |
/2/. Иными словами, если |
||
W (s) |
||||||
O |
|
|
O |
|
|
|
передаточную функцию объекта можно представить в виде |
||||||
|
WO ( s ) |
Bos ( s )Bou ( s ) |
, |
(5.50) |
||
|
|
|||||
|
|
|
Ao ( s ) |
|
||
где Bos(s) и Bou(s) – устойчивый и неустойчивый полиномы, то в качестве ус-
тойчивого приближения инверсии объекта принимают
W i |
|
Ao ( s ) |
. |
(5.51) |
|
||||
O |
|
B ( s ) |
|
|
|
|
os |
|
|
Также следует отметить, что требование собственности передаточной
функции Q(s) накладывают ограничения на выбор желаемой передаточной функции замкнутой системы. В частности если относительная степень пере-
даточной функции объекта управления nотнo no mo , где no и mo – порядки
полиномов знаменателя и числителя WO(s) соответственно, то для обеспече-
ния собственности Q(s) относительная степень формирующего фильтра должна быть как минимум равна относительной степени модели объекта.
Рассмотрим с точки зрения аффинной параметризации компенсацию возмущающих воздействий приложенных к входу или выходу объекта управления. Если возмущение приложено к выходу объекта, то передаточная
функция относительно ошибки по возмущающему воздействию определяет-
ся выражением (3.146), а в случае приложения возмущения к входу объекта – выражением (3.149). Переписав (3.146) и (3.149) с учетом (5.47), получим
fВЫХ (s ) 1 Q(s )WO (s ), |
(5.52) |
484 |
|

fВХ (s) 1 Q(s)WO(s) WO (s),. |
(5.53) |
где fВЫХ и fВХ передаточные функции относительно ошибки по возму-
щающему воздействию в случае, когда возмущение приложено к выходу и к входу объекта соответственно.
Из (5.52) и (5.53) следует, что установившаяся ошибка, во всем диапа-
1
зоне частот будет равна нулю только в том случае если Q( s) WO ( s) .
Однако выполнение указанного условия, с учетом ограничений, налагаемых на выбор FQ(s), а, следовательно, и на Q(s), возможно только в случае, когда объект не имеет неминимально-фазовых нулей при нулевой относительной степени WO(s). Поэтому представляется целесообразным рассмотреть выбор
Q(s) для обеспечения компенсации ошибок в установившемся режиме и в за-
данном диапазоне частот.
В соответствии с (5.52) и (5.53) условие нулевой установившейся
ошибки может быть выражено следующим образом
Q(0 ) F (s ) W |
1 |
, |
(5.54) |
|
(0 ) |
||||
Q |
O |
|
|
|
где желаемая передаточная функция замкнутой системы FQ(s) должна удов-
летворять условию FQ(0)=1.
В более общем случае устойчивость замкнутой системы и нулевая ошибка в установившемся режиме будут обеспечены, если выбрать переда-
точную функцию Q(s) вида
1
Q( s ) sQ( s) WO (0 ) Qa ( s ), (5.55)
где Q( s ) – любая устойчивая передаточная функция, а Qa(s) – устойчивая передаточная функция, удовлетворяющая условию Qa(0)=1.
В случае, когда возмущающее воздействие имеет составляющие на частотах 1, 2, … , k замкнутая система будет обладать нулевой устано-
вившейся ошибкой на этих частотах, если Q(s) удовлетворяет условию
|
|
|
|
k |
|
|
|
|
Q(s ) |
BQ |
( s ) |
BQ1( s ) (s2 i2 ) BQ2 (s ) |
, |
(5.56) |
|||
i |
1 |
|
||||||
|
|
|
|
|
|
|||
|
|
|
AQ ( s ) |
|||||
|
AQ ( s ) |
|
|
|
||||
где
485
BQ2 ( j i |
) AQ ( j i |
) WO ( j i |
1 |
, i 1,2, ,k . |
(5.57) |
) |
|||||
|
|
|
|
|
|
Анализ (5.53) показывает, что при выборе Q(s) в соответствии с (5.48)
или (5.49) нежелательные (медленные или сильно колебательные) полюсы объекта управления продолжают оказывать влияние на переходные процес-
сы, вызываемые возмущающими воздействиями на входе объекта. Для ком-
пенсации этих нежелательных полюсов необходимо, чтобы они входили в
(5.52) в качестве нулей. Если s1 – нежелательный полюс WO(s), то для его компенсации в (5.53) необходимо выполнение условия
1 Q(s1 )WO(s1 ) 0, |
(5.58) |
что при выборе Q(s) в соответствии с (5.48) приводит к необходимости вы-
полнения условия
FQ ( s1 ) 1. |
(5.59) |
Компенсацию нежелательных полюсов поясним на примере.
Пример 5.4 /2/. Рассмотрим передаточную функцию объекта
6
WO(s ) ( s 1)(s 6 )
при условии, что шум измерения ограничивает полосу пропускания замкнутой системы частотой =10 рад/с. При этих условиях возможный выбор Q(s) имеет вид
Q(s) FQ(s)(s 1)(s 6 ) 6 .
Учитывая, что относительная степень передаточной функции WO(s) равна двум, а
также ограничение полосы пропускания замкнутой системы в качестве формирующего фильтра FQ(s) необходимо принять низкочастотный фильтр, полоса пропускания которого ограничена частотой =10 рад/с с относительной степенью не менее двух. Кроме того,
для обеспечения нулевой установившейся ошибки, потребуем, чтобы FQ(0)=1. С учетом вышеизложенного в качестве FQ(s) примем
1000( s 1)
FQ(s) (s2 14s 100)(s 10) ,
где параметр , должен быть выбран из условия компенсации нежелательного полюса s1=- 1. В соответствии с (5.59) имеем
FQ |
( 1) |
1000( 1) |
|
1 |
|
(1 14 100)( 1 10) |
|||||
|
|
, |
|||
откуда 217 .
1000
486

Таким образом, окончательно получим
|
|
|
|
Q( s) |
1000(0.217s 1)(s 1)( s 6 ) |
|
|
|||
|
|
6(s2 14s 100 )( s 10 ) . |
||||||||
|
|
|
|
|
||||||
С учетом (5.47) передаточная функция регулятора примет вид |
||||||||||
W |
|
( s ) |
(0.217s 1)( s 1)(s 6 ) |
|
(0.217s 1)( s 1)(s 6 ) |
|
||||
|
R |
|
|
6s( s2 24s 23) |
|
6s(s 23)( s 1) |
||||
|
|
|
(0.217s 1)(s 6 ) |
, |
|
|
|
|
||
|
|
|
|
|
|
|
||||
|
|
|
|
6s( s 23) |
|
|
|
|
||
а из (5.53) следует
6s(s 23 )
fВХ ( s ) 1 Q( s )WO( s) WO (s ) (s2 14s 100 )(s 10 )( s 6 ).
Как видно из последнего выражения, передаточная функция по ошибке не имеет нежелательного полюса.
В заключении рассмотрим синтез типовых законов регулирования с помощью аффинной параметризации для объектов регулирования, которые могут быть аппроксимированы передаточными функциями вида /2/
WO (s ) |
|
KO |
, |
|
(5.60) |
||
TO s 1 |
|
||||||
|
|
|
|
|
|||
WO (s ) |
|
|
KO |
|
, |
(5.61) |
|
T2 s2 |
2 T s 1 |
||||||
|
O |
|
|
O |
|
|
|
W (s ) |
K |
O |
e s |
. |
|
(5.62) |
|
|
|
|
|
||||
O |
TO s 1 |
|
|
|
|||
|
|
|
|
|
|||
Если объект представлен инерционным звеном первого порядка (5.60)
и не имеет немимнимально-фазовых нулей, то в соответствии с (5.48) Q(s)
примет вид:
Q(s ) F |
( s ) |
TO s 1 |
, |
(5.63) |
|
||||
Q |
|
KO |
|
|
|
|
|
||
откуда относительная степень FQ(s) должна быть не менее единицы, что по-
зволяет в качестве формирующего фильтра использовать звено с передаточ-
ной функцией
F (s) |
1 |
, |
(5.64) |
|
Q |
s 1 |
|
где – параметр настройки.
Выражения (5.63) и (5.64) с учетом (5.47) позволяют представить пере-
487

даточную функцию регулятора в виде
WR |
( s ) |
TO s 1 |
|
TO |
|
1 |
, |
(5.65) |
|
|
|
||||||
|
|
KO s |
KO |
KO s |
|
|||
которая соответствует передаточной функции ПИ закона регулирования с параметрами настройки
K |
|
|
TO |
, |
T |
K |
|
. |
(5.66) |
|
|
|
|||||||
|
р |
|
KO |
и |
|
O |
|
|
|
Передаточная функция замкнутой системы с объектом (5.60) и ПИ ре-
гулятором, настройки которого выбраны в соответствии с (5.66) имеет вид
(s) |
1 |
. |
(5.67) |
|
|||
s 1 |
|
||
Анализ (5.67) показывает, что, изменяя и рассчитывая настройки ПИ регулятора в соответствии с (5.66), возможно изменение быстродействия системы.
В случае если объект представлен выражением (5.61) то
T2s2 |
2 T s 1 |
|
|
|
Q( s ) F ( s ) |
O |
O |
. |
(5.68) |
|
|
|||
Q |
KO |
|
|
|
|
|
|
|
|
Из (5.68) следует, что Q(s) будет бисобственной если в качестве FQ(s)
выбрать передаточную функцию вида
FQ ( s) |
1 |
, |
(5.69) |
2 s2 2 Q s 1 |
где и Q – параметры настройки.
Выражения (5.68) и (5.69) позволяют представить передаточную функцию регулятора в виде
T2s2 2 T s 1
WR ( s ) O O
KO ( 2 Q )s
|
2 T |
1 |
|
T2 |
|
s, |
|||
|
O |
|
|
|
|
O |
|
||
KO ( 2 Q ) |
KO ( 2 Q )s |
KO ( 2 Q |
) |
||||||
|
|
|
(5.70) |
||||||
|
|
|
|
|
|
|
|
||
что соответствует передаточной функции ПИД регулятора с настройками
|
2 T |
|
|
|
T2 |
|
|
|
O |
|
|
|
O |
|
|
Kp |
|
; |
Tи KO ( 2 Q ); Td |
|
|
. |
(5.71) |
KO ( 2 Q ) |
KO ( 2 Q ) |
||||||
Для объекта (5.62) используя разложение звена запаздывания в ряд Па488
де |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e s |
2 s |
, |
|
|
|
|
|
|
|
|
(5.72) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 s |
|
|
|
|
|
|
|
|
|
|
|
|
что позволяет представить (5.62) в виде |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
WO ( s ) |
|
KO (2 s ) |
|
|
|
. |
|
|
|
(5.73) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(TO s 1)(s 2 ) |
|
|
|
|||||||||||
|
|
В данном случае, поскольку объект имеет неминимально-фазовый нуль |
||||||||||||||||||||||||||
Q(s) определяется в соответствии с (5.49) |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
Q( s ) F |
|
( s ) |
(TO s 1)( s 2 ) |
. |
|
|
(5.74) |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
Q |
|
|
|
|
|
2KO |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
Выбирая в качестве FQ(s) (5.69) в соответствии с (5.47) получим пере- |
||||||||||||||||||||||||||
даточную функцию регулятора |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
T s2 |
( 2T )s 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
W |
R |
( s ) |
O |
O |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
KO (2 2 4 Q )s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, (5.75) |
|||||||||
|
|
(2TO ) |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
TO |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
||||||||
KO (2 2 4 Q ) |
KO (2 |
|
|
|
|
|
|
|
|
|
KO (2 2 |
4 Q ) |
||||||||||||||||
|
|
2 4 Q )s |
|
|||||||||||||||||||||||||
которая также соответствует ПИД закону регулирования с настройками |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
Kp |
|
|
|
|
|
(2TO ) |
|
|
; |
|
|
|
|||||||||
|
|
|
|
|
|
|
KO (2 2 4 Q ) |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
K |
O |
(2 2 |
4 |
Q |
) |
|
|
(5.76) |
||||||||||||
|
|
|
|
|
|
|
Ти |
|
|
|
|
|
|
|
|
|
; |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T
T O . d KO (2 2 4 Q )
5.3. Синтез систем автоматического управления с произвольной структурой
5.3.1. Структурный синтез систем автоматического управления
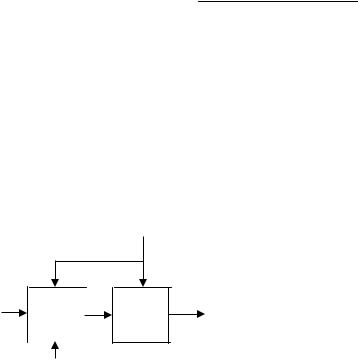
Задачей структурного синтеза является, в первую очередь, установле-
ние структуры операторов, образующих комбинированную систему управле-
ния, упрощенная функциональная схема
f
которой приведена на рис. 5.22.
При управлении объектом в про-
g |
u |
ОУ |
у |
|||
|
УУ |
|
|
489 |
||
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 5.22. Функциональная схема системы управления
странстве состояний необходимо располагать текущими значениями (изме-
рять) n величин – фазовых координат системы /93/.
Однако знание фазовых координат еще не позволяет предсказать дви-
жение объекта, т.е. его состояние в последующий через бесконечно малый интервал dt момент времени. Для знания движения объекта необходимо в общем случае знать не только фазовые координаты объекта, но и скорости их изменения. Например, для объекта второго порядка состояние в любой мо-
мент времени однозначно определяется двумя величинами: выходной коор-
динатой объекта и скоростью ее изменения. Если же надо определить движе-
ние объекта, т.е. его состояние в любой ближайший момент времени, то по-
мимо этих величин следует знать также и скорости их изменения в тот же момент времени. Таким образом, необходимо дополнительно знать вторую производную (ускорение) выходной величины. Таким образом, если знание состояния объекта во многих случаях стабилизации объектов является доста-
точным для построения их систем управления, то в случае следящих систем измерение только фазовых координат недостаточно для качественного управления процессом /93/.
Можно отметить существенную особенность скоростей изменения фа-
зовых координат, состоящую в том, что только скорость изменения фазовой координаты y(n-1), равная y(n) – высшей производной регулируемой величины объекта, в любой момент времени зависит явно от управляющего воздейст-
вия. Следовательно, только она может быть изменена в нужном направлении при управлении объектом. Скорости изменения остальных фазовых коорди-
нат y(i), i=0,1,2,…(n-1), не могут в тот же момент времени зависеть от управ-
ляющего воздействия. Действительно, записывая векторное уравнение (5.23)
в скалярной форме с учетом принятых на рис. 5.22 обозначений, имеем
490